1.本实用新型涉及无人机技术领域,尤其涉及无人机飞行用误差纠正装置。
背景技术:
2.无人驾驶飞机简称“无人机”(“uav”),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。由于无人驾驶飞机对未来空战有着重要的意义,世界各主要军事国家都在加紧进行无人驾驶飞机的研制工作。2013年11月,中国民用航空局(ca)下发了《民用无人驾驶航空器系统驾驶员管理暂行规定》,由中国aopa协会负责民用无人机的相关管理。根据《规定》,中国内地无人机操作按照机型大小、飞行空域可分为11种情况,其中仅有116千克以上的无人机和4600立方米以上的飞艇在融合空域飞行由民航局管理,其余情况,包括日渐流行的微型航拍飞行器在内的其他飞行,均由行业协会管理或由操作手自行负责。
3.但现有技术中,针对导航定位行业需要在地图上实时反应上传回来的gps 点坐标问题,现有的google、高德等电子地图均存在数据偏移的问题,从而导致无人机的gps坐标点无法准确的反馈在地图上。对此,由于各行业应用的不同所采用的解决方法也不尽相同。基于全部经纬度点建立起来的纠偏库数据量庞大,同时纠偏的数据集庞大且与数据库交互频繁,单一查询纠偏库会对数据库造成很大的压力,且数据返回速度不能保证。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在针对导航定位行业需要在地图上实时反应上传回来的gps点坐标问题,现有的google、高德等电子地图均存在数据偏移的问题,从而导致无人机的gps坐标点无法准确的反馈在地图上。对此,由于各行业应用的不同所采用的解决方法也不尽相同。基于全部经纬度点建立起来的纠偏库数据量庞大,同时纠偏的数据集庞大且与数据库交互频繁,单一查询纠偏库会对数据库造成很大的压力,且数据返回速度不能保证的问题,而提出的无人机飞行用误差纠正装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:无人机飞行用误差纠正装置,包括无人机,所述无人机的底部固定安装有纠正检测环,所述纠正检测环的底部固定安装有多个激光雷达,所述纠正检测环的底部固定安装有多个副摄像头,所述无人机的底部固定安装有主摄像头,所述无人机的顶部固定安装有驱动装置,所述驱动装置的顶部固定安装有定位装置,所述无人机的内部固定安装有主板,所述主板的顶部固定安装有分析模块,所述主板的顶部固定安装有定位模块。
6.优选的,所述无人机的顶部固定安装有安装环,所述安装环的外侧套设有外密封圈。
7.优选的,所述主板的顶部固定安装有通信模块,所述主板的顶部固定安装有传输
模块。
8.优选的,所述无人机的内侧安装有内密封圈。
9.优选的,所述驱动装置的外壁安装有多个支撑杆,所述支撑杆的一端连接有机翼。
10.优选的,所述无人机的底部固定安装有支撑架。
11.优选的,所述主板的顶部固定安装有安装螺栓,所述安装螺栓的一端安装在无人机的内侧底部。
12.优选的,所述驱动装置和支撑杆之间设置有套装座。
13.优选的,所述机翼的两侧为斜向条状。
14.优选的,所述无人机和副摄像头之间固定连接有吊装座。
15.与现有技术相比,本实用新型的优点和积极效果在于,
16.1、本实用新型,通过设置有纠正检测环,在纠正检测环的底部通过安装有激光雷达和副摄像头,在无人机的底部以及顶部分别安装有主摄像头和定位装置,在无人机的内部与纠正检测环之间连通,且内部安装有主板,并在主板的顶部安装有分析模块、定位模块、通信模块和传输模块,从而方便了在无人机使用的过程中,可通过副摄像头和主摄像头对周边的情况进行侦查,并将侦查的数据传输至分析模块进行分析识别是否正确,若错误则进行纠正,通过可通过通信模块对数据进行远程传输,配合连接上网络从而可进一步提升了定位的精度,对错误的定位及时提供误差纠正的效果,通过激光雷达则可对周边的情况进行雷达测速测距,从而保证了返回时的速度,避免因数据库出现问题造成速度无法控制的问题。
17.2、本实用新型中,设置有安装环,在无人机的顶部安装有安装环,在安装环的外侧连接处安装有外密封圈,在安装环的内部连接位置安装有内密封圈,从而方便了后期对无人机进行快速拆卸,有利于在遇到故障时提供维修效率,避免因不便于拆装造成维修效率降低,同时通过安装有外密封圈和内密封圈可在内部分别提供有效的密封效果,避免了进水进灰尘等情况造成无人机损坏的问题。
附图说明
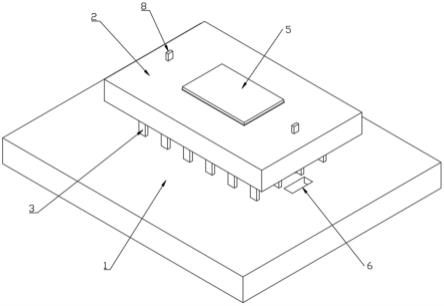
18.图1为本实用新型提出无人机飞行用误差纠正装置的立体结构示意图;
19.图2为本实用新型提出无人机飞行用误差纠正装置的仰视结构示意图;
20.图3为本实用新型提出无人机飞行用误差纠正装置的内部结构示意图。
21.图例说明:1、无人机;2、纠正检测环;3、安装环;101、驱动装置;102、机翼;103、支撑架;201、激光雷达;202、副摄像头;203、主摄像头;204、定位装置;205、主板;206、分析模块;207、定位模块;208、通信模块;209、传输模块;301、外密封圈;302、内密封圈。
具体实施方式
22.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和实施例对本实用新型做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
23.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用不同于在此描述的其他方式来实施,因此,本实用新型并不限于下面公开
说明书的具体实施例的限制。
24.实施例1,如图1-3所示,本实用新型提供了无人机飞行用误差纠正装置,包括无人机1,无人机1的底部固定安装有纠正检测环2,纠正检测环2的底部固定安装有多个激光雷达201。纠正检测环2的底部固定安装有多个副摄像头202,无人机1的底部固定安装有主摄像头203。
25.无人机1的顶部固定安装有驱动装置101,驱动装置101的顶部固定安装有定位装置204。无人机1的内部固定安装有主板205,主板205的顶部固定安装有分析模块206,主板205的顶部固定安装有定位模块207。在纠正检测环2的底部通过安装有激光雷达201和副摄像头202,在无人机1的底部以及顶部分别安装有主摄像头203和定位装置204,在无人机1的内部与纠正检测环2之间连通,且内部安装有主板205,并在主板205的顶部安装有分析模块206、定位模块207、通信模块208和传输模块209,从而方便了在无人机使用的过程中,可通过副摄像头 202和主摄像头203对周边的情况进行侦查,并将侦查的数据传输至分析模块206 进行分析识别是否正确,若错误则进行纠正,通过可通过通信模块208对数据进行远程传输,配合连接上网络从而可进一步提升了定位的精度,对错误的定位及时提供误差纠正的效果。通过激光雷达201则可对周边的情况进行雷达测速测距,从而保证了返回时的速度,避免因数据库出现问题造成速度无法控制的问题。
26.如图1和图2所示,无人机1的顶部固定安装有安装环3,安装环3的外侧套设有外密封圈301,在安装环3的外侧连接处安装有外密封圈301,在安装环3的内部连接位置安装有内密封圈302,从而方便了后期对无人机1进行快速拆卸,有利于在遇到故障时提供维修效率,避免因不便于拆装造成维修效率降低,同时通过安装有外密封圈301和内密封圈302可在内部分别提供有效的密封效果,避免了进水进灰尘等情况造成无人机损坏的问题。
27.如图1所示,主板205的顶部固定安装有通信模块208,主板205的顶部固定安装有传输模块209,通过通信模块208可提供有效的通信作用,通过传输模块 209可将检测的数据进行硬件传输。
28.如图1和图2所示,无人机1的内侧安装有内密封圈302,通过内密封圈302有利于提升了内部的密封性。
29.如图1所示,驱动装置101的外壁安装有多个支撑杆,支撑杆的一端连接有机翼102,通过支撑杆方便了对机翼102进行安装。
30.如图1所示,无人机1的底部固定安装有支撑架103,通过支撑架103可在底部提供支撑作用。
31.如图3所示,主板205的顶部固定安装有安装螺栓,安装螺栓的一端安装在无人机1的内侧底部,通过安装螺栓可保证主板205稳定安装使用。
32.如图1所示,驱动装置101和支撑杆之间设置有套装座,通过套装座可方便了对支撑杆进行安装。
33.如图1所示,机翼102的两侧为斜向条状,通过斜向条状设计有利于保证无人机的升力。
34.如图1所示,无人机1和副摄像头202之间固定连接有吊装座,通过吊装座可方便了对副摄像头202进行安装固定。
35.本装置的使用方法及工作原理:在无人机1的内部与纠正检测环2之间连通,且内
部安装有主板205,并在主板205的顶部安装有分析模块206、定位模块207、通信模块208和传输模块209,从而方便了在无人机使用的过程中,可通过副摄像头202和主摄像头203对周边的情况进行侦查,并将侦查的数据传输至分析模块206进行分析识别是否正确,若错误则进行纠正,通过可通过通信模块208对数据进行远程传输,配合连接上网络从而可进一步提升了定位的精度,对错误的定位及时提供误差纠正的效果,通过激光雷达201则可对周边的情况进行雷达测速测距,从而保证了返回时的速度,避免因数据库出现问题造成速度无法控制的问题。在安装环3的外侧连接处安装有外密封圈301,在安装环3的内部连接位置安装有内密封圈302,从而方便了后期对无人机1进行快速拆卸,有利于在遇到故障时提供维修效率,避免因不便于拆装造成维修效率降低。同时通过安装有外密封圈301和内密封圈302可在内部分别提供有效的密封效果,避免了进水进灰尘等情况造成无人机损坏的问题。通过通信模块208可提供有效的通信作用,通过传输模块209可将检测的数据进行硬件传输,通过内密封圈302有利于提升了内部的密封性,通过支撑杆方便了对机翼102进行安装,通过支撑架103 可在底部提供支撑作用,通过安装螺栓可保证主板205稳定安装使用,通过套装座可方便了对支撑杆进行安装,通过斜向条状设计有利于保证无人机的升力,通过吊装座可方便了对副摄像头202进行安装固定。
36.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。