1.本发明涉及无人机航迹验证技术领域,具体涉及一种基于激光点云的无人机航线有效性验证方法。
背景技术:
2.低空无人机操控技术作为一门新兴技术,在各行业领域都展现了自己独特的作用,由于无人机成本低、无伤亡风险、机动性能好、可进行超视距飞行、使用方便高效等特点也广泛应用在各行业领域。不过随着无人机应用的普及,人们对于无人机操控技术水平要求也是越来越高,无人机驾驶员的需求也越来越多,飞手应运而生,通过飞手操控无人机进行更加细化的任务,例如进行测绘、电力、气象、环保、海监等任务的执行,由于飞手进行任务完全依靠飞手的技术与经验,不可避免的会出现航迹偏离,采集照片达不到任务要求的问题,在杆塔巡检飞行任务中,航迹偏离会导致无人机撞塔的危险以及拍摄的杆塔巡检照片不合格,需重新执行任务的风险。
技术实现要素:
3.针对现有技术存在的不足,本发明的目的在于提供一种基于激光点云的无人机航线有效性验证方法。
4.为了实现上述目的,本发明提供如下技术方案:
5.一种基于激光点云的无人机航线有效性验证方法,包括如下步骤:
6.转换实飞航迹经纬度坐标为utm坐标;
7.匹配与实飞航迹中杆塔塔型对应的三维点云杆塔;
8.确定三维点云杆塔的照片成像范围;
9.验证模拟航迹的有效性。
10.在本发明中,优选的,所述实飞航迹采用json格式,将json格式的经纬度坐标转换为utm坐标。
11.在本发明中,优选的,所述匹配与实飞航迹中杆塔塔型对应的三维点云杆塔具体包括以下步骤:
12.转换实际拍摄杆塔台账、航迹文件的经纬度坐标为utm坐标,和点云杆塔模型、点云杆塔模型台账的坐标格式相同;
13.计算点云杆塔与实际杆塔位置偏移数据,依所述偏移数据平移所述点云杆塔位置;
14.旋转点云杆塔以匹配实际杆塔通道方向。
15.在本发明中,优选的,所述旋转点云杆塔以匹配实际杆塔通道方向,具体包括以下步骤:
16.依据实际大号侧坐标与实际小号侧坐标计算实际的杆塔通道向量;
17.依据点云大号侧坐标与点云小号侧坐标计算点云杆塔通道向量;
18.计算实际杆塔以及点云杆塔通道向量长度;
19.计算实际的杆塔向量与点云杆塔向量的夹角α的余弦值,使用反余弦公式求得最终的夹角angle1;
20.结合图形学旋转矩阵,按照夹角旋转整个点云模型,以使三维点云杆塔匹配实际航迹方向与位置。
21.在本发明中,优选的,所述确定三维点云杆塔的照片成像范围包括如下步骤:
22.已知实际的拍摄位置,相机与正北的水平夹角、相机参数以及拍摄俯仰角;
23.依据图形学转换矩阵算法结合相机与正北的水平夹角,拍摄俯仰角计算得到转换矩阵matrix,相对正北(0,1,0)旋转得到最终相机朝向向量;
24.计算相机朝向向量与相机指向拍摄点的向量的夹角的余弦值,反余弦公式得到夹角angle2;
25.计算目标点到拍摄中心的距离以及目标点距相机位置的深度值。
26.在本发明中,优选的,确定三维点云杆塔的照片成像范围后,还包括杆塔部件的单体化命名,基于点云自动分类技术,对杆塔部件进行单体化命名,命名部件包括杆塔、地线、绝缘子、绝缘子导线端、绝缘子横担端。
27.在本发明中,优选的,通过所述对杆塔部件进行单体化命名,计算得到杆塔、塔头、塔身、塔基的拍摄目标点位置,具体包括以下步骤:
28.计算杆塔分类点云,得到杆塔中心点(centerx,centery),并取最高点作为塔顶topz,最低点作为塔底bottomz;
29.塔全貌拍摄位置坐标为:(centerx,centery,(bottomz topz)/2);
30.塔头拍摄位置坐标为:(centerx,centery,t_maxz-(t_maxz-t_minz)/4)
31.塔身拍摄位置坐标为:(centerx,centery,((bottomz topz)/2-bottomz)/3*2 bottomz)
32.塔基拍摄位置坐标为:(centerx,centery,bottomz)。
33.在本发明中,优选的,通过地线单体化结果,判断左右地线拍摄目标点位置;通过绝缘子单体化结果,判断绝缘子、绝缘子导线端和绝缘子横担端的拍摄部位。
34.在本发明中,优选的,进行模拟航迹有效性验证,若航迹撞塔,则飞手实际巡检航迹不合格,停止模拟验证;若航线未撞塔,依据导入的巡检航线,对杆塔点云进行模拟巡检拍照,得到验证成果照片;对成果照片依据成像范围内的主要单体命名。
35.在本发明中,优选的,对比模拟拍摄数量与标准拍摄数量,输出拍摄点位漏拍率报告;判断拍摄照片的有效性,计算巡检照片有效比率,输出照片有效评价报告;对比已拍摄照片中拍摄的单体部位是否包含所有标准拍摄部位,对拍摄照片根据捕获的单体内容命名,并输出拍摄目标名称报告。
36.与现有技术相比,本发明的有益效果是:
37.本发明的方法通过建立与实际航迹中杆塔匹配的三维点云模型,在三维点云模型中模拟航迹飞行巡检,拍摄模型照片,对照片进行有效评价,并生成评价报告,通过在三维模型中模拟航迹飞行巡检,分析模拟照片的有效性,可以判断实飞航迹的安全性和准确性,同时检验了飞手的精细化巡检实飞能力。
附图说明
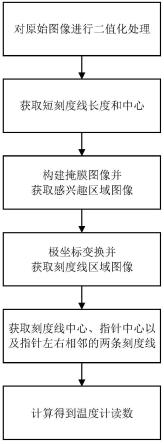
38.图1为本发明所述的一种基于激光点云的无人机航线有效性验证方法的流程示意图。
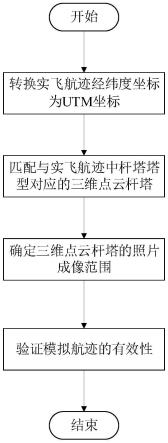
39.图2为本发明所述的一种基于激光点云的无人机航线有效性验证方法的模拟航迹有效性验证的流程示意图。
40.图3为本发明所述的一种基于激光点云的无人机航线有效性验证方法中杆塔部件分类示意图。
41.图4为本发明所述的一种基于激光点云的无人机航线有效性验证方法中绝缘子部件分类示意图。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
44.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
45.请同时参见图1至图2,本发明一较佳实施方式提供一种基于激光点云的无人机航线有效性验证方法,通过匹配塔型相似的杆塔的三维点云模型数据,将飞手实际计划的航迹在三维点云模型中进行模拟复现,以验证航迹的安全性,以及航迹拍摄照片的有效性,从而检验航迹的实操性以及飞手的精细化巡检实飞能力,避免出现低效或不安全的航迹,主要包括如下步骤:
46.转换实飞航迹经纬度坐标为utm坐标;
47.匹配与实飞航迹中杆塔塔型对应的三维点云杆塔;
48.确定三维点云杆塔的照片成像范围;
49.验证模拟航迹的有效性。
50.具体的,基于杆塔台账,将实际航迹与三维点云模型杆塔进行匹配,所述实飞航迹采用json格式,将json格式的实飞航迹经纬度坐标转换为utm坐标,以与点云杆塔模型和点云杆塔模型台账的坐标保持一致。
51.具体的,三维点云杆塔的选择,需要和航迹实际对应的杆塔塔型相近,以基于相近的塔型进行验证,使得验证更贴合实际,结果更加准确,导入的实际航迹进行坐标转换后,利用已知的杆塔台账,可判断得到在实际航迹中杆塔的大小号侧方向,并依据航迹中杆塔
的大小号侧方向,调整三维点云杆塔的方向,以使云模型杆塔与实际航迹的通道方向保持一致,所述匹配与实飞航迹中杆塔塔型对应的三维点云杆塔具体包括以下步骤:
52.s01,采用通用算法(通用横轴墨卡托投影)将实际拍摄的杆塔台账、航迹文件的经纬度坐标转换为utm坐标,以和点云模型杆塔、点云模型杆塔台账的经纬度坐标保持一致,坐标统一格式为(x/y/z),依据已知台账信息可确认:
53.实际杆塔坐标:(realtowerx,realtowery,realtowerz)
54.实际大号侧坐标:(realtowerbigx,realtowerbigy,realtowerbigz)
55.实际小号侧坐标:(realtowersmallx,realtowersmally,realtowersmallz)
56.点云杆塔坐标:(lastowerx,lastowery,lastowerz)
57.点云大号侧坐标:(lastowerbigx,lastowerbigy,lastowerbigz)
58.点云小号侧坐标:(lastowersmallx,lastowersmally,lastowersmallz)
59.s02,计算点云杆塔与实际杆塔位置偏移数据,
60.offsetx=realtowerx-lastowerx;
61.offsety=realtowery-lastowery;
62.offsetz=realtowerz-lastowerz;
63.并按该偏移数据平移所述点云杆塔位置,即所有点云坐标加上偏移(offsetx,offsety,offsetz),平移后的点云杆塔坐标为(lastowerx offsetx,lastowery offsety,lastowerz offsetz);
64.s03,旋转点云杆塔以匹配实际杆塔通道方向,具体包括以下步骤:
65.s031,依据实际大号侧坐标与实际小号侧坐标计算实际的杆塔通道向量:
66.realchannel.x=realtowerbigx
–
realtowersmallx;
67.realchannel.y=realtowerbigy
–
realtowersmally;
68.realchannel.z=realtowerbigz
–
realtowersmallz;
69.s032,依据点云大号侧坐标与点云小号侧坐标计算点云杆塔通道向量:
70.laschannel.x=lastowerbigx
–
lastowersmallx;
71.laschannel.y=lastowerbigy
–
lastowersmally;
72.laschannel.z=lastowerbigz
–
lastowersmallz;
73.s033,计算实际杆塔以及点云杆塔通道向量长度:
74.依据实际杆塔通道向量计算出实际杆塔通道向量长度为realchannel.length,
75.依据点云杆塔通道向量计算出点云杆塔通道向量长度为laschannel.length;
76.s034,依据实际杆塔通道向量和点云杆塔通道向量计算得到实际的杆塔向量与点云杆塔向量的夹角α的余弦值,使用反余弦公式求得最终的夹角angle1,
77.s035,结合图形学旋转矩阵,将整个点云模型按照夹角angle1进行旋转,完成三维点云杆塔与实际航迹方向与位置的匹配。
78.具体的,根据导入的实飞航迹进行模拟飞行,航迹中包含有经纬度坐标、云台俯仰角度等参数,依据参数信息对杆塔点云模型进行验证拍照,所述确定三维点云杆塔的照片成像范围包括如下步骤:
79.s11,已知实际的拍摄位置camerapos,相机与正北的水平夹角camerayaw、相机参数以及拍摄俯仰角camerapich;
80.依据图形学转换矩阵算法结合相机与正北的水平夹角,拍摄俯仰角计算得到转换矩阵matrix,相对正北(0,1,0)旋转得到最终相机朝向向量:
81.camerav=matrix*(0,1,0)
82.s12,计算拍摄点targetpos到camerav向量线的距离,距离越近越接近拍摄照片的中心位置,相机指向拍摄点的向量camera2target=targetpos-camerapos,依据图形学公式计算相机朝向向量与相机指向拍摄点的向量的夹角的余弦值,再利用反余弦公式得到夹角angle2;
83.s13,依据距离公式计算出目标点到拍摄中心的距离distancetocenter以及目标点距相机位置的深度值deeptotarget:
84.distancetocenter=sin(angle2)/|camera2target|;
85.deeptotarget=cos(angle2)/|camera2target|;则distancetocenter越小越接近拍摄中心,且deeptotarget越小时拍摄点成像平面距相机点越近。
86.在本实施方式中,在基于点云自动分类技术,对杆塔部件进行单体化命名,命名部件包括杆塔、地线、绝缘子、绝缘子导线端、绝缘子横担端。
87.如图3和图4所示,具体的,通过所述对杆塔部件进行单体化命名,计算得到杆塔、塔头、塔身、塔基的拍摄目标点位置,具体包括以下步骤:
88.s21,计算杆塔分类点云,得到杆塔中心点(centerx,centery),并取最高点作为塔顶topz,最低点作为塔底bottomz;
89.塔全貌拍摄位置坐标为:(centerx,centery,(bottomz topz)/2);
90.塔头拍摄位置坐标为:(centerx,centery,t_maxz-(t_maxz-t_minz)/4)
91.塔身拍摄位置坐标为:(centerx,centery,((bottomz topz)/2-bottomz)/3*2 bottomz)
92.塔基拍摄位置坐标为:(centerx,centery,bottomz)。
93.s22,通过地线单体化结果,判断左右地线拍摄目标点位置;
94.s23,通过绝缘子单体化结果,判断绝缘子的拍摄目标点位置,以及绝缘子导线端和绝缘子横担端的拍摄部位。
95.在本实施方式中,当点云模型匹配完毕,进行模拟航迹有效性验证,验证过程中,若航迹坐标与点云杆塔坐标重合,则代表实际航迹撞塔,飞手实际巡检航迹不合格,停止模拟验证;若航线未撞塔,按照导入的巡检航线,逐个拍摄巡检照片,并依据相机成像原理,对杆塔点云进行模拟巡检拍照,得到验证成果照片;并对成果照片依据成像范围内的主要单体命名。
96.具体的,对于地线、绝缘子串、绝缘子导线端和绝缘子横担端的命名,命名规则首先依据相机成像范围内显示的目标物是哪个单体就按照该单体命名,当一张照片中遇到多个单体,则根据单体距离相机的距离,以及单体距离相片中心位置的距离,按照距离相机以及相机相片中心位置近的单体命名;由于塔全貌、塔头、塔基、塔身的拍摄距离通常距杆塔的距离较远,因这几个位置和相机拍摄点距离较远匹配时容易混淆,所以先过滤掉识别出的地线、绝缘子串、绝缘子导线端和绝缘子横担端照片,再对剩余的照片根据单体距离相机的距离,以及单体距离相片中心位置的距离进行匹配,最终确定照片名。
97.在本实施方式中,对比模拟飞手航迹中的拍摄数量与标准拍摄数量,计算飞手拍
摄点位的漏拍率,输出拍摄点位漏拍率报告;判断拍摄照片的有效性,判断照片是否在相机成像有效范围内(该有效范围定义为照片长宽2/3的范围内),并计算有效照片数量,计算巡检照片有效比率,输出照片有效评价报告;对比已拍摄照片中拍摄的单体部位是否包含所有标准拍摄部位,将实际模拟巡检拍摄的照片内容与标准拍摄部位进行对比,确定实际拍摄照片的部位是否包含所有标准拍摄部位,对拍摄照片根据捕获的单体内容命名,并输出拍摄目标名称报告。
98.具体的,例如羊角塔模型中应该拍摄照片总数26张,包含26个拍摄点,其中照片命名包含1张全塔、1张塔头、1张塔身、1张塔基,2张通道、6个绝缘子串、6个绝缘子横担端挂点、6个绝缘子导线端挂点,2个地线挂点,首先判断模拟实际航迹拍摄出的照片总数是否为26张,接着判断其中拍摄的照片中,包含多少个绝缘子导线端、绝缘子横担端、绝缘子串等单体,确定哪些部位没有拍到或拍全,依据判断结果,输出航迹评价报告。
99.上述说明是针对本发明较佳可行实施例的详细说明,但实施例并非用以限定本发明的专利申请范围,凡本发明所提示的技术精神下所完成的同等变化或修饰变更,均应属于本发明所涵盖专利范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。