1.本发明涉及测绘勘探技术领域,特别是一种定向方法及装置技术方案。
背景技术:
2.定向(或者寻北)是测绘、勘测等领域的一项基础要求。粗略的定向可以使用磁性指北针,但是其精度差,而且容易受到外界磁场干扰。精密的寻北通常使用天文法、陀螺仪法以及双gnss接收机基线方向法。其共同点是精度高,但是设备复杂,观测时间较长。
技术实现要素:
3.为了解决上述现有技术中存在的不足,本发明提出了一种低成本高精度的新定向方案。
4.为了实现上述目的,本发明提出一种定向方法,设置一个数字光学成像装置,其中包括感光器件、镜头和gnss接收机,使天体在感光器件上成像;实现方式包括在数字光学成像装置中设置镜头,镜头的光轴穿过感光器件的几何中心,使得天体能够在一个感光器件上成像;然后使用gnss接收机对当前位置进行定位,并得到精确的时间;计算该时刻天体的精确方位角,此时感光器件上天体的成像位置位于天体方位与感光器件的几何中心的连线延长线上,通过精确提取天体成像位置,从而精确地确定装置的摆放方位,得到北向。
5.而且,读取感光器件的成像结果,进行二值化,调整二值化的阈值,直到白色值缩为一个区域,该区域即为天体的成像,求得该区域的质心,质心坐标(xi,yi)即为天体成像中心坐标,
6.天体在xoy坐标中的角度b=arctan(yi/xi) (y《0)*180;
7.同时读取gnss接收机的输出结果,从中提取当前的时间和位置信息,根据时间和位置信息,调用预存的根据当前位置和时间计算天体方位角、高度角的算法,得到当前天体的方位角a;根据当前所处位置的纬度确定北半球还是南半球,分别用下列公式得到目标的方位:
8.在北半球,c=a-b 180-e
9.在南半球,c=a-b-180-e
10.最后将结果归化到0-360度,
11.c=(c 360)mod 360,c就是目标的方位角;
12.其中e值为系统安装误差。
13.而且,进行系统误差的校正,实现方式为,先设置e=0,在一个水平的操作台上,用陀螺寻北仪作为辅助,安装一根校准件,其方向为正北,将数字光学成像装置的外壳的水平长边贴紧校准件,计算c值,此时正确的c应为0,故此时测量到的c值是系统安装误差,将c当作e存储起来,完成校准。
14.另一方面,本发明还提供一种定向装置,包括感光器件、全景镜头、三轴倾角传感器、gnss接收机、计算单元、存储单元、显示单元、供电单元和外壳,全景镜头的光轴垂直于
感光器件的感光面,焦距调至接近无限远,使天文目标清晰成像,全景镜头光轴与感光器件的交点坐标作为原点o,感光器件的两个边作为坐标轴,在感光器件上建立平面直角坐标系xoy;三轴倾角传感器与感光器件、外壳刚性连接,三轴倾角传感器的两个轴x’、y’分别平行于建立的平面直角坐标系xoy的x、y轴,外壳上具有瞄准器,oy轴与瞄准器以及外壳的一个边平行,这个边作为测量边;供电单元、gnss接收机、三轴倾角传感器、感光器件、存储单元、显示单元,分别通过各自的电气接口接在计算单元上。
15.而且,所述感光器件采用ccd或者cmos。
16.而且,所述镜头采用180度全景镜头。
17.而且,设置巴德膜,所述巴德膜置于镜头前,支持选择遮盖镜头或者打开。
18.而且,用于实现如上所述的一种定向方法。
19.本发明基于天文观测法,但是结合了现代器件和设计,使得寻北设备轻便,寻北工作快速而且精确。采用本方法,当使用800万像素的感光器件,太阳高度角不高于45度的时候,可以在30秒钟内实现精度为0.1度的寻北结果(30秒耗时用于gnss冷启动后的定位授时),与一米长基线的双gnss定向精度基本一致,而体积重量可以做到只有双gnss定向设备的1/20,成本估计也只有双gnss定向设备的百分之一。如果提高感光器件的分辨率,同时调整镜头和感光器件的位置关系,例如使用1300万像素的感光器件,将镜头光轴置于感光器件长边的中线上,则最高可以得到0.03秒的分辨率,同时仍然能够保持体积和成本的优势。
20.本发明方案携带实施简单方便,实用性强,解决了相关技术存在的实用性低及实际应用不便的问题,能够提高用户体验,大幅降低使用成本的同时能够保证定向精度,具有重要的市场价值。
附图说明
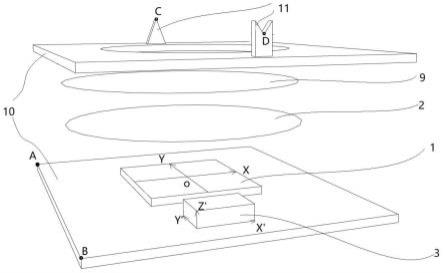
21.图1是本发明实施例的部件关系示意图;
22.图2是本发明实施例的位于北半球的时候坐标系以及各个角度之间的关系;
23.图3是本发明实施例的位于南半球的时候坐标系以及各个角度之间的关系。
具体实施方式
24.以下结合附图和实施例具体说明本发明的技术方案。
25.自古以来,利用天文法寻北就是一个可靠的手段。例如利用太阳寻北,在北半球,正午时刻,太阳应该处于南方,而其造成的阴影指向北方。在南半球正好相反。
26.但是用肉眼和普通计时器,结合太阳来寻北,其精度是有限的,只能达到定性,难以达到精确定量,因为不同地区之间存在时差,而一年中的每一天的同一个时刻,太阳的角度也并不相同。
27.本发明的原理是,首先设置一个数字光学成像装置,使天体的像可以成在感光器件(例如ccd,cmos)上,其镜头的光轴穿过感光器件(例如ccd,cmos)的几何中心,使得太阳(或者月亮,或者其他星体)能够在一个感光器件上成像,然后使用gnss对当前位置进行定位,并得到精确的时间,然后计算该时刻太阳(或者月亮,或者其他星体)的精确方位角,此时感光器件上天体的成像位置,位于天体方位与感光器件的几何中心的连线延长线上,其成像位置可以精确提取,从而精确地确定装置的摆放方位,得到北向。
28.本发明实施例优选提供一种定向装置(也即数字光学成像装置),由ccd或者cmos感光器件、180度全景镜头、三轴倾角传感器、gnss接收机、计算单元、存储单元、显示单元、供电单元、巴德膜、外壳构成,180度全景镜头的光轴垂直于ccd或者cmos感光器件的感光面,焦距调至接近无限远,使天文目标清晰成像,全景镜头光轴与感光器件的交点坐标作为原点o,感光器件的两个边作为坐标轴,在感光器件上建立平面直角坐标系xoy;巴德膜置于镜头前,可以选择遮盖镜头或者打开,三轴倾角传感器与感光器件、外壳刚性连接,三轴倾角传感器的两个轴x’,y’分别平行于建立的平面直角坐标系xoy的x,y轴,外壳上具有瞄准器,oy轴与瞄准器以及外壳的一个边平行,这个边作为测量边;供电单元、gnss接收机、三轴倾角传感器、感光器件、存储单元、显示单元,分别通过各自的电气接口接在计算单元上。
29.存储单元中存储了天文星历以及根据当前位置和时间计算天体方位角、高度角的算法,计算单元可以从存储单元中调取该算法。
30.将外壳的紧贴需要测量的目标,或者将瞄准器瞄准目标,计算单元读取三轴倾斜传感器的倾角,并将其显示在显示单元上,操作人员根据显示调整装置为水平。
31.读取感光器件的成像结果,进行二值化,调整二值化的阈值,直到白色值缩为一个区域,该区域即为天体的成像,求得该区域的质心,质心坐标(xi,yi)即为天体成像中心坐标,天体在xoy坐标中的角度b=arctan(yi/xi) (y《0)*180,同时读取gnss接收机的输出结果,从中提取当前的时间和位置信息,根据时间和位置信息,调用存储单元中根据当前位置和时间计算天体方位角、高度角的算法,得到当前天体的方位角a;根据当前所处位置的纬度确定北半球还是南半球,得到目标的方位。具体实施时,这个过程可采用计算机软件技术实现自动运行流程。
32.参见图1,具体地,实施例优选提供的一种定向装置结构包括:
33.感光器件(1),用于成像,将影像数字化后便于进行处理
34.全景镜头(2),视角180,保证无论天体在哪个方位都可以成像在感光器件(1)上
35.三轴倾角传感器(3),用于辅助将感光器件(1)调为水平
36.gnss接收机(4),用于获取当前的位置和时间
37.计算单元(5),用于计算天体的位置以及北向
38.存储单元(6),用于存储天文星历和根据星历计算方位角、高度角的算法
39.显示单元(7),用于显示倾斜角度,帮助调节水平,并显示定向结果
40.供电单元(8),给整个系统供电
41.巴德膜(9),用于降低太阳光强度,避免损坏感光器件
42.外壳(10),用于容纳设备的其他部件以及用其测量边测量本地目标
43.瞄准器(11),用于瞄准远处目标
44.参见图1,实施例中的装置安装使用实现如下:
45.1,将全景镜头(2)与感光器件(1)安装在一起,全景镜头(2)的光轴与感光器件(1)的感光平面垂直,全景镜头(2)光轴与感光器件(1)的交点坐标作原点o,感光器件(1)的两个边作为坐标轴,在感光器件(1)上建立平面直角坐标系xoy,如图2。
46.2,将全景镜头(2)焦距调节至接近无限远,使得太阳或者月亮等天体可以在感光器件(1)上清晰成像。
47.3,将三轴倾角传感器(3)与感光器件(1)以及外壳(10)刚性连接,三轴倾角传感器
(3)的两个轴x’,y’分别平行于步骤1中建立的平面直角坐标系的x,y轴,使得三轴倾角传感器(3)可以反映感光器件(1)的倾斜角度。外壳(10)在外面,起到保护和容纳的作用。
48.4,将供电单元(8)、gnss接收机(4)、三轴倾角传感器(3)、感光器件(1)、存储单元(6)、显示单元(7)接在计算单元(5)上。
49.5,存储单元(6)存储了天文星历以及根据当前位置和时间计算天体方位角、高度角的算法,具体算法为现有技术,本发明不予赘述。
50.6,使用巴德膜(9)时置于全景镜头(2)前方,可以选择遮盖全景镜头(2)或者不遮盖全景镜头(2),只有在用于将太阳作为观测目标的时候才用巴德膜(9)遮挡全景镜头(2),而用于观测月亮等其他星体时无需遮挡。
51.7,外壳(10)上具有瞄准器(11),xoy坐标系的oy轴与瞄准器(11)的瞄准线dc以及外壳的一个边(例如ba)平行,该边ba作为测量边。具体实施时,瞄准器(11)可以设置在外壳(10)顶面上方,外壳(10)至少有一个直线边,以便作为oy轴的平行基准。
52.8,由于安装误差以及器件误差,使用前需要进行校正。首先在一水平操作平台上,将一个校准件用其他方式(陀螺仪等)找到正北,然后将外壳(10)的测量边贴紧校准件,记录本装置得到的方位读数,并将其作为系统误差存储,以便在实际使用中进行校正。例如读出的角度为e度,则将e保存,然后在使用中,将测量计算得到的角度减去e再显示,就是校正后的准确方位角。
53.9,使用时,计算单元(5)首先读取三轴倾斜传感器(3)的x,y轴倾斜度数,并显示在显示单元(7)上,可由用户根据该数字将感光器件(1)调整为水平,即倾斜度数为0,并使用瞄准器(11)瞄准目标或者将外壳(10)的测量边贴紧目标。
54.10,gnss接收机(4)获取当前的位置和时间,计算单元(5)获取这些信息,同时,太阳或者月亮等天体a通过全景镜头(2)在感光器件(1)上成像为i,计算单元(5)在获取图像的同时,根据位置和时间用现有的方法可以计算该时刻太阳或者月亮等天体的方位角a,该方位角a的坐标系为eon,坐标系eon的坐标原点和直角坐标xoy的原点重合,均为o,而其横轴为正东e,纵轴为正北n,坐标系xoy与坐标系eon之间的夹角c正是本发明需要的目标的方位角。
55.11,计算单元(5)获取的图像二值化,通过调整二值化的阈值,白色值缩为一个区域,该区域即为天体的成像,求得该区域的质心,质心坐标(xi,yi)即为天体成像中心坐标,,连接坐标系xoy的原点o与该中心点i,得到连线oi,该连线在坐标系xoy中的方向b可以根据i在xoy坐标系中的坐标(xi,yi)计算得到:
56.b=arctan(yi/xi) (y《0)*180,其中,(y《0)*180表示逻辑运算,判断y《0是真的还是假的:
57.如果y《0,那么(y《0)=1,那么(y《0)*180=180;如果y》0,那么(y《0)=0,那么(y《0)*180=0。
58.在北半球存在以下关系:
59.c=a-b 180
60.而在南半球存在以下关系:
61.c=a-b-180
62.以上关系在图2,图3中展示。
63.具体所在位置是南半球还是北半球由gnss获取的坐标的纬度可以判定。得到的c再减去e,即去除了系统误差的目标方位:
64.c=c-e
65.最后将结果归化到0-360度:
66.c=(c 360)mod 360,c就是目标的方位角。
67.为便于实施参考起见,提供实施例的具体实施过程如下:
68.1,材料:
69.[1]imx317 cmos传感器搭配180度全景镜头一体化模块,镜头光轴垂直穿过cmos感光器中心(imx317分辨率为3864x 2202像素,因此镜头光轴垂直穿过为位置是1932,1101)
[0070]
[2]mpu6050三轴倾角传感器,
[0071]
[3]neo-m8 gnss接收机,
[0072]
[4]imx6 arm mpu(计算)搭配256mram、512m rom(存储)
[0073]
[5]spi接口12864oled显示屏
[0074]
[6]锂聚合物电池以及pmu
[0075]
[7]巴德膜,
[0076]
[8]外壳
[0077]
2,制作和使用步骤:
[0078]
根据实现方法的步骤1,和具体实施的材料,可知xoy坐标系的原点位置o位于imx317的(1932,1101)点;
[0079]
将巴德膜遮挡在镜头外;
[0080]
调节搭配imx317的180度全景镜头,使其焦距位于接近无限远,即可以使天体清晰成像;
[0081]
安装固定imx317和mpu6050三轴倾角传感器,使mpu6050的x,y两个个轴分别与imx317的x,y两个边(即xoy坐标系的x,y轴方向一致),并且使x轴与z轴分别平行于外壳的水平长边和高,水平长边作为测量边,用于贴紧目标,量测目标的指向;
[0082]
imx317接在imx6 arm的csi2接口上;
[0083]
mpu6050接在imx6 arm的iic接口上;
[0084]
neo-m8接在imx6 arm的uart接口上;
[0085]
spi接口12864oled接在imx6 arm的spi接口上;
[0086]
imx6 arm的rom中安装linux,并且运行定向算法系统,该系统具备以下功能:
[0087]
.读取imx317的成像结果并且计算最亮点在xoy坐标系中的角度b;;
[0088]
.读取mpu6050数据并且将x,y两个方向的倾角显示在12864oled显示屏上;
[0089]
.读取neo-m8 gnss接收机的输出结果,从中提取当前时间和位置信息;
[0090]
.根据当前时间和位置,计算太阳的方位角a;;
[0091]
.在mpu6050输出的数据表明x,y两个方向皆为水平的时候,读取imx317的成像结果并且将图像二值化,只留下天体的成像区域,计算天体成像区域的质心坐标,即天体成像i在xoy坐标系中的位置(xi,yi),而其在坐标系xoy中角度b=arctan(yi/xi) (y《0)*180,同时读取neo-m8 gnss接收机的输出结果,从中提取当前时间和位置,根据当前时间和位
置,计算太阳的方位角a,进一步根据当前位置在北半球还是南半球,分别用如下方法计算得到目标的方向:
[0092]
在北半球:
[0093]
c=a-b 180-e
[0094]
在南半球:
[0095]
c=a-b-180-e
[0096]
最后将结果归化到0-360度:
[0097]
c=(c 360)mod 360,c就是目标的方位角。
[0098]
3,e值的获取:(即系统误差的校正)
[0099]
先设置e=0,在一个水平的操作台上,用陀螺寻北仪作为辅助,安装一根校准件,其方向为正北,将本寻北装置的外壳的水平长边贴紧校准件,计算c值,此时正确的c应为0,故此时测量到的c值是系统安装误差,将c当作e存储起来,完成校准。
[0100]
由于巴德膜的作用,在白天,通常情况下该寻北设备水平放置的时候,imx317上只有太阳可以成像,其他光源被阻挡。
[0101]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
