1.本发明涉及卫星组合导航精度技术领域,尤其涉及一种松耦合导航的量测信息不同步处理方法。
背景技术:
2.现如今主流的导航方式是以惯性导航系统(ins)输出为基础,卫星信息为辅,二者利用松耦合、紧耦合或超紧耦合三种组合方式中的一种进行组合滤波。其中,松耦合是基于速度、位置作为量测,与惯性信息进行组合,可直接利用接收机的输出,结构简单、易于实现,且在可见卫星颗数大于4颗时,与紧耦合精度相当,因此应用非常广泛且方法十分成熟。
3.理想情况是,同一时刻的惯性导航系统输出和卫星信息进行组合滤波,输出修正过的速度、位置、姿态,但是实际情况下,卫星和惯性导航系统的输出均存在不同延迟。
4.目前,组合导航实现卫星信息和惯导数据时间同步的通用方法,是卫星的秒脉冲(pps)到达时锁住惯性导航系统解算的、离秒脉冲最近的前一拍的惯性信息,待接收机解算出秒脉冲所对应时刻的速度、位置等信息后,将其进行组合,如图2所示。但是该方法忽略了两方面的误差:
5.(1)惯性导航系统感应到线运动、角运动,到输出相应的速度增量和角增量,这之间具有一定的时间延迟。通常惯性导航系统输出惯性解算数据的频率可达到400hz,甚至更高;而很多惯性导航系统的输出延迟可以达到解算周期的两倍以上,尤其是激光惯性导航系统,为了滤掉陀螺高频抖动,加入了低通滤波器,会引入更大时延。
6.(2)此外,原则上秒脉冲应和当前时刻的惯性解算数据组合,但是由于惯性数据的频率一般为400hz,存在频率不同步,因此近似地将卫星数据和距离秒脉冲最近的一拍惯性数据组合,但是秒脉冲和最近一拍的惯性数据之间仍存在时间间隔,如图2中所示,并不是准确的同一时刻数据进行组合。
技术实现要素:
7.本发明的目的:提出一种松耦合导航的量测信息不同步处理方法,分别设计实时处理和后验处理两种方法,将(1)惯性导航系统感应运动到输出的时间差(2)卫星、惯性数据组合时,由于频率不同步导致的时间差,这两方面影响组合同步性的时延误差进行统一处理,提高惯性、卫星组合的同步性。
8.本发明的技术方案:
9.本发明实施例提供一种松耦合导航的量测信息不同步处理方法,用于包含惯性导航系统、卫星接收机的组合系统,具体包括如下步骤:
10.s1、测量惯性导航系统感应外界运动到输出角增量、速度增量之间的时间差,记为惯性导航系统输出延迟
△
timu;
11.s2、将惯性导航系统和卫星接收机固定安装,待系统正常对准后,进入组合导航;
12.s3、当卫星秒脉冲信号到达时,记录距离卫星秒脉冲最近的一拍惯导脉冲;便于待
卫星接收机解算完成,输出卫星信息后,与之组合滤波;
13.s4、惯导系统一直对外高频发送惯性脉冲。使用卫星秒脉冲作为计数器开门信号,卫星秒脉冲到达后最近的惯性脉冲中断作为计数器关门信号;利用惯导数据的更新周期t,计算出卫星秒脉冲到达时刻与距离其之前最近的惯性脉冲到达时刻之间的时间间隔,记为组合导航时间不同步误差
△
t
nav
;
14.s5、计算所述步骤s1中的惯性导航系统输出延迟
△
t
imu
与所述步骤s4中的组合导航时间不同步误差
△
t
nav
之和,并用其除以惯导数据的更新周期t,向下取整得到n,记余数为δt;
15.s6、利用拉格朗日插值法,将卫星秒脉冲到达时刻对应的卫星速度、位置,利用惯导解算的加速度、速度,移动到秒脉冲前δt所对应的时刻,得到卫星在同步时刻的虚拟测量值;
16.s7、组合滤波时,将所述步骤s3中记录的惯导脉冲之后n拍所对应的惯导脉冲,与所述步骤s6得到的卫星虚拟测量值进行组合导航。
17.在一个可能的实施例中,所述步骤s1具体包括如下步骤:
18.s101:将惯性导航系统置于转台上,同时在转台上安装激光测振仪,以测量转台转动的角增量;
19.s102:对所述转台输入角速率变化的控制指令,分别采集激光测振仪测量的角增量,之后将测量得到的转台转动角增量和激光测振仪测量的角增量这两组测量结果绘制于横轴为时间轴的同一坐标系下;
20.s103:对比分析s102绘制的两组绘制曲线,两组曲线的每个转折点之间的时间间隔为惯性导航系统输出延迟
△
timu。经过计算推导,虽然加速度计输出与陀螺输出之间有一定时间间隔,但是这段时间间隔与陀螺感应运动到输出角增量的时间间隔相比可以忽略不计,因此只考虑惯性导航系统输出角增量的延迟足以满足精度要求。
21.在一个可能的实施例中,在所述步骤s2对准过程具体包括如下步骤:
22.s201、保持系统静止;
23.s202、根据实际陀螺和加速度计测量值、已知的地理系重力矢量和地球自转角速度矢量,通过多矢量定姿原理进行解析粗对准,估计姿态角;
24.s203、根据惯导误差方程,构建误差状态转移矩阵;对误差状态转移矩阵进行卡尔曼滤波,得出失准角误差;在估计姿态角基础上修正失准角误差后得到准确姿态角、航向角。
25.在一个可能的实施例中,所述步骤s3具体包括如下步骤:
26.s301、卫星秒脉冲信号到达时,锁住距离卫星秒脉冲最近时刻的一拍惯导脉冲,为当前惯导输出的数据打上时标,设该惯导脉冲到达时刻为t(k);
27.s302、卫星接收机解算卫星数据,一定时间间隔后输出该拍卫星秒脉冲对应的卫星解算信息。
28.在一个可能的实施例中,所述步骤s4中具体包括如下步骤:
29.s401:卫星秒脉冲到达时刻,计数器从零开始计数,同时,对pps_flag寄存器赋值01;
30.s402:当卫星秒脉冲之后最近的惯导脉冲到达时,计数器停止计数,将计数器值放
入pps_delay_cnt寄存器,并清零计数器,同时,对pps_flag寄存器赋值10;
31.s403:在某一时刻读取到pps_flag寄存器值为10时,说明在此时刻前一个惯导周期内有卫星秒脉冲到达,此时首先清零pps_flag寄存器,然后从pps_delay_cnt寄存器中读取计数值,并清零pps_delay_cnt寄存器;若pps_flag寄存器值不是10,则不进行任何处理;
32.s404:将pps_flag寄存器和pps_delay_cnt寄存器初始化为00;
33.s405:将计数器数值换算成时间,即卫星秒脉冲到达时刻与其之后最近的惯导到达时刻的解算输出之间的时间间隔dt
later
;
34.s406、为获得卫星秒脉冲到达时刻与其之前最近的惯导到达时刻的解算输出之间的时间间隔
△
tnav,则利用惯导更新周期t减去dtlater即可得到
△
tnav。
35.在一个可能的实施例中,所述步骤s5中向下取整过程根据如下公式(一)进行:
[0036][0037]
其中:
△
t
imu
为所述步骤s1中的惯性导航系统输出延迟,
△
t
nav
为所述步骤s4中的组合导航时间不同步误差
△
t
nav
,t为惯导数据的更新周期,根据该公式向下取整得到n,记除后的余数为δt。
[0038]
在一个可能的实施例中,所述步骤s6具体包括如下步骤:
[0039]
s601、选取所述步骤301中t(k)时刻所对应惯导脉冲之后的第n拍、第(n 1)拍惯导脉冲,即t(k n)时刻、t(k n 1)时刻的惯导脉冲,设惯导解算的速度计算输出分别为:
[0040]
s602、通过惯导脉冲更新时间间隔内的惯导速度平均变化近似卫星在组合滤波时刻的平均线加速度a,如公式(二):
[0041][0042]
其中,t为惯导数据的更新周期;
[0043]
s603、设卫星秒脉冲到达时刻为t
pps
,将卫星速度量测转换至系统感应外界运动到输出t(k n)时刻惯导脉冲时的速度;获得距离t
pps
时间间隔δt时刻的虚拟卫星速度量测,通过以公式(三)计算:1
[0044][0045]
其中,为卫星秒脉冲到达时刻卫星解算速度;
[0046]
s604、利用虚拟卫星速度量测以及卫星秒脉冲到达时刻卫星解算输出的卫星位置信息求取虚拟卫星位置量测:
[0047][0048]
在一个可能的实施例中,所述步骤s7中,卫星秒脉冲到达时,不立即组合导航,而是t(k n)时刻惯导脉冲到达时,利用该时刻的惯导解算结果与s6中计算的卫星虚拟量测进行组合导航。
[0049]
在一个可能的实施例中,如无法实时处理,可以进行后验处理,以优化实时的组合导航结果,具体包括如下步骤:
[0050]
s801、测量惯性导航系统输出延迟
△
t
imu
,方法通s1;
[0051]
s802、组合导航时,记录秒脉冲到达的时刻的计算机办卡计数器计数以及秒脉冲前一拍惯导脉冲到达时刻的计数器计数,并记录全部卫星数据和惯导速度增量、角增量;
[0052]
s803、利用s802两个计数的差值,计算组合导航时间不同步误差
△
t
nav
;
[0053]
s804、利用
△
t
nav
和
△
t
imu
代入s5中的计算公式,得到n和
△
t;
[0054]
s805、利用
△
t计算虚拟卫星量测,方法同s6;
[0055]
s806、将虚拟量测和卫星秒脉冲到达后n拍的惯导数据进行组合滤波。
[0056]
本发明的有益技术效果:
[0057]
1、综合考虑了惯性导航系统输出延迟和组合导航时间不同步误差这两方面的时间误差,该方法将二者一并考虑、共同补偿,且无需过多的计算量。
[0058]
2、设计测量惯性导航系统输出延迟的方法,该方法操作便捷。
[0059]
3、设计测量组合导航时间不同步误差的方法,该方法无需占用计算机板块过多的内存。
附图说明:
[0060]
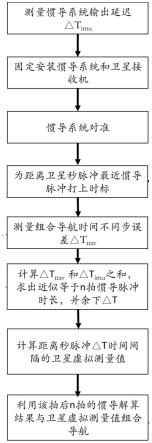
图1本发明优选实施例的方法流程图
[0061]
图2现有技术卫星秒脉冲、惯导脉冲时序图
[0062]
图3本发明优选实施例的测量示组合导航时间不同步误差
△
t
nav
示意图
[0063]
图4本发明优选实施例的组合导航时间不同步误差示意图
具体实施方式
[0064]
下面结合附图对本发明做进一步详细描述。如图1所示,一种松耦合导航的量测信息不同步处理方法,用于包含惯性导航系统、卫星接收机的组合系统,具体包括如下步骤:
[0065]
s1、测量惯性导航系统感应外界运动到输出线速度、角速度之间的时间差。将其中一套惯性导航系统置于转台上,同时在转台上安装激光测振仪,以测量转台转动的角增量。对转台输入角速率有明显变化、明显转折的控制指令,分别采集激光测振仪测得的角增量,之后将两组角增量绘制于同一坐标系下对比分析每个转折点两组数据之间的时间间隔。经过计算推导,虽然加速度计输出与陀螺输出之间有一定时间间隔,但是这段时间间隔与陀螺感应运动到输出角增量的时间间隔相比可以忽略不计,因此只考虑惯性导航系统输出角增量的延迟足以满足精度要求。
[0066]
s2、将惯性导航系统和卫星接收机固定安装好后,将系统正常对准后,进入组合导航。安装好系统后,让惯性导航系统进入对准状态,输出初始姿态,之后进入导航模式。
[0067]
s3、当卫星秒脉冲信号到达时,记录距离卫星秒脉冲最近的一拍惯导脉冲,便于待接收机解算完成,输出卫星信息后,与之组合滤波;
[0068]
s3、测量出卫星秒脉冲到达时刻最近的前一时刻惯导解算结果之间的时间间隔δt,如图3所示,具体步骤如下:
[0069]
(1).使用pps作为计数器开门信号,pps后最近的惯导脉冲中断作为计数器关门信
号。
[0070]
(2)pps到时,计数器从零开始计数。同时,对pps_flag寄存器赋值01。
[0071]
(3)pps后最近的惯导脉冲中断到,计数器停止计数,将计数器值放入pps_delay_cnt寄存器,并清零计数器。同时,对pps_flag寄存器赋值10。
[0072]
(4)软件在某一中断时刻读取到pps_flag寄存器值为10时,说明在此中断前一个惯导周期内有pps到达,此时首先清零pps_flag寄存器,然后从pps_delay_cnt寄存器中读取计数值,并清零pps_delay_cnt寄存器;若pps_flag寄存器值不是10,则不进行任何处理。
[0073]
(5)pps_flag和pps_delay_cnt寄存器初始化为00。
[0074]
(6)将计数器数值换算成时间dt,利用惯导更细周期t减去dt即可得到δt。
[0075]
s4、计算两个时间差的和(δt δt),用其除以惯导数据的更新周期t,向下取整得n,记余数为。如图4所示,现在的算法中,卫星秒脉冲对应的卫星信息并不是和惯性导航系统感应到该时刻载体运动所对应的惯导输出相组合,由于两方面的延迟,卫星是和(δt δt)前的c时刻的惯导数据进行组合。考虑到惯性导航系统的输出延迟,卫星信息应该和在卫星秒脉冲到达δt时间后的惯导数据组合,如图4中的a点;但又因为惯导的输出频率有限,因此选用了距离a点最近的、a前面的惯导脉冲到达时刻b点的数据进行组合。b时刻和c时刻相差的脉冲数n,可以用向下取整得出,而b时刻和a时刻的时间间隔δt可以由下式得出。
[0076]
δt=(δt δt)-n*t
[0077]
s5、在实时处理中,锁住卫星的秒脉冲到达的时刻,等待惯性导航系统解算n拍后,将接收机解算的该拍的gps数据与惯性导航系统输出的之后n拍的解算信息进行组合,如图4所示。基于脉冲平移的方法,使得在组合时,将卫星到达时刻和b时刻的数据一同处理,直接将惯导感应运动时刻对应的最近的惯导输出与卫星信息进行组合。
[0078]
s6、利用拉格朗日插值的方法,将秒脉冲对应的卫星速度、位置,利用惯导解算的加速度、速度,移动到秒脉冲前δt所对应的时刻。将惯导数据在近期三个时刻更新的速度、位置利用拉格朗日三点插值,得出位置、速度在δt内的改变量,将改变量补偿到pps对应的卫星测量值上,得到卫星在同步时刻的虚拟测量值。
[0079]
s7、如无法实时处理,可以进行后验处理,以优化实时的组合导航结果。秒脉冲到达的时刻,为卫星数据和当前惯导输出的数据打上时标,在利用导航原始数据进行组合滤波时,选用时标前n拍脉冲对应的惯性信息。再用类似s6的方法,补偿δt导致的不同步误差。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。