1.本发明涉及一种利用地面激光对静止卫星光学图像导航和定位检验的方法,属于卫星遥感技术领域。
背景技术:
2.风云四号(fy-4)气象卫星是中国的新一代静止轨道气象卫星,采用三轴稳定姿态控制平台,极大地提高了对地观测精度、观测频次及观测区域的灵活性,实现了技术上的重大跨越。对于卫星上的各类光学遥感仪器,如何实现各个通道图像的精确地理定位,是面临的重要问题。
3.在申请号为202110217968.x的中国专利申请中,公开了一种静止轨道微波探测卫星图像定位与配准全物理仿真试验方法和系统,包括:步骤1:基于视线测量系统进行微波载荷视线指向模拟;步骤2:采用高精度大范围动态光轴测量的方式,进行微波载荷视线测量;步骤3:通过二维扫描镜的转动进行补偿,消除平移运动引起的视线测量误差;步骤4:对微波载荷与卫星平台进行协同扫描成像;步骤5:进行微波载荷视线定位配准。
4.上述方法可真实模拟整星机动扫描时的微波视线定位配准过程,为微波遥感卫星的图像定位与配准设计提供依据。然而,该方法无法适应不同类型的遥感仪器的导航和定位精度检验需求。
技术实现要素:
5.本发明所要解决的技术问题在于提供一种利用地面激光对静止卫星光学图像导航和定位检验的方法,以提高对卫星图像进行导航和定位精度检验的效果。
6.为了实现上述目的,本发明采用以下的技术方案:
7.一种利用地面激光对静止卫星光学图像导航和定位检验的方法,包括如下步骤:
8.根据设定条件选取多个激光站的设置点,以使所述多个设置点呈设定形状分布;
9.在每一个所述设置点,根据卫星上的遥感仪器的类型设置激光站,以使任意一个所述激光站均能够对应一种或多种类型的遥感仪器;
10.根据所述遥感仪器的导航和定位需求,对所述激光站进行参数设置;
11.通过多个所述激光站与所述遥感仪器进行激光信号交互,以对卫星图像进行精准导航和定位精度检验。
12.其中较优地,所述设定条件至少包括:气候条件、遮挡情况、供电情况、网络/通信能力、基础设施情况以及交通试验环境;所述设定形状至少包括三角形。
13.其中较优地,设置所述激光站,至少包括如下步骤:
14.设置激光器与光学发射子系统;其中,所述激光器与光学子系统包括激光源、驱动电源、温度控制器、激光波长稳定器、光学组件、功率计和波长计,以用于发射指定中心波长的连续或脉冲激光信号,并对激光输出功率、波长进行实时监测;
15.设置通信与控制子系统;其中,所述通信与控制子系统包括服务器、系统状态监测
模块、工作控制模块和通信模块,以用于进行工作指令的发送、状态监测和数据采集;
16.设置望远镜及指向控制子系统;其中,所述望远镜及指向控制子系统包括激光发射望远镜、地平式经纬仪、望远镜指向参数计算与标校、星敏感器、激光指向精密调整、望远镜电控机箱,以用于激光扩束与准直、激光发射望远镜精度指向参数计算和标校、以及精度控制和卫星跟踪;
17.设置激光和卫星对准辅助子系统,所述激光和卫星对准辅助子系统包括观测望远镜、中继光路模块、回波信号检测模块、微光ccd图像瞄准处理模块和地靶瞄准矫正模块,以用于将激光与卫星进行对准;
18.设置激光站管控子系统,以用于控制所述激光站的开启与关闭;
19.设置天文圆顶,以用于密封或打开所述发射望远镜所处空间;
20.设置超净室,以用于将各个子系统设置于所述超净室内。
21.其中较优地,对所述激光站进行参数设置,具体包括:
22.设置激光源工作波长,以使所述激光源中心波长与卫星上所述遥感仪器的波长一致;
23.设置激光源发射模式,所述发射模式至少包括连续发射模式和脉冲发射模式;
24.设置激光发射功率的范围,其中,所述激光发射功率的最小值根据所述遥感仪器的灵敏度确定,所述激光发射功率的最大值以响应不饱和的原则确定;
25.设置功率稳定度,所述功率稳定度包括短期稳定度和长期稳定度;
26.设置激光发散角;
27.设置发射望远镜口径,其中,发射望远镜口径为发射激光束的束腰直径的两倍;
28.设置指向控制精度、指向测量精度、指向稳定度,其中,所述指向控制精度、指向测量精度、指向稳定度不大于所述激光发散角的十分之一;
29.设置扫描方式,其中,所述扫描方式以固定俯仰角、固定方位角的方式设置;
30.设置持续工作时长。
31.其中较优地,所述通过多个所述激光站与所述遥感仪器进行激光信号交互,具体包括:
32.获取所述遥感仪器的导航或定位精度检验需求;
33.根据所述导航或定位精度检验需求,设置星地观测模式;其中,所述星地观测模式至少包括:参与信号交互的激光站的数量、各所述激光站使用的激光源、各所述激光站与卫星的对应关系、以及各所述激光站的开关机时间;
34.控制各所述激光站的观测望远镜指向卫星,并开启所述激光器进行观测;
35.控制各所述激光站的激光器停止工作,并获取在所述激光器开启期间,所述遥感仪器返回的激光信号;
36.对所述激光信号进行数据处理,以根据数据处理结果对卫星图像进行导航和定位检测。
37.其中较优地,所述对所述激光信号进行数据处理,具体包括:
38.对所述激光信号进行亚像元激光位置提取,以获得激光位置偏差;
39.通过多个所述激光站的位置偏差推算所述卫星在滚动、偏航、俯仰三个方向的等效失配角;
40.利用卫星在滚动、偏航、俯仰三个方向的等效失配角对所述卫星图像进行导航;并通过将所述亚像元激光位置与预设位置相比较,对所述卫星图像进行定位精度检验。
41.其中较优地,所述通过多个所述激光站的位置偏差推算所述卫星在滚动、偏航、俯仰三个方向的等效失配角,具体包括:
42.在地固坐标系中,根据地球表面被遥感点位置矢量卫星位置向量是求取其对应的视向量是其中,
43.根据激光站的理论位置矢量与地球表面被遥感点位置矢量得到矢量偏差则所述理论位置矢量所对应的视向量为:所对应的视向量为:
44.将所述地固坐标系中的所有矢量旋转至轨道坐标系中,则将所述地固坐标系中的所有矢量旋转至轨道坐标系中,则其中,t
eci2orb
、t
ecr2eci
分别是惯性坐标系到轨道坐标系及地固坐标系到惯性坐标系的转换矩阵;
45.在所述轨道坐标系内求视向量的单位向量
[0046][0047]
将遥感仪器的坐标系中的视向量通过t
inst2sat
转换到卫星本体坐标系,再通过t
sat2orb
旋转至轨道坐标系下;
[0048][0049]
其中,op为遥感仪器的视向量,α,β分别为遥感仪器的东西向扫描角和南北向步进角;t
sat2orb
、t
inst2sat
分别是卫星本体坐标系到轨道坐标系及遥感仪器的坐标系到卫星本体坐标系的转换矩阵;所述遥感仪器坐标系用inst表示;所述卫星本体坐标系用sat表示;所述轨道坐标系用orb表示;所述惯性坐标系用eci表示;所述地固坐标系用ecr表示;
[0050]
通过所述公式1和所述公式2,得到:
[0051][0052]
通过所述公式3计算得到所述卫星在滚动、偏航、俯仰三个方向的等效失配角;其中,ξr,ξy,ξ
p
分别为滚动、偏航、俯仰三个方向等效失配角。
[0053]
其中较优地,所述利用所述卫星在滚动、偏航、俯仰三个方向的等效失配角对所述卫星图像进行导航包括:
[0054]
根据所述卫星在滚动、偏航、俯仰三个方向的等效失配角,对卫星指向的位置进行精准定位;
[0055]
其中较优地,所述利用所述卫星在滚动、偏航、俯仰三个方向的等效失配角对所述
卫星图像进行导航包括:
[0056]
根据所述卫星在滚动、偏航、俯仰三个方向的等效失配角,获取所述遥感仪器的扫描镜指向角,并通过控制链路发送至所述卫星,以引导所述遥感仪器进行在轨指向修正。
[0057]
其中较优地,所述通过将所述亚像元激光位置与预设位置相比较,对所述卫星图像进行定位精度检验,具体包括:
[0058]
获取任务信息;
[0059]
根据所述任务信息,获取遥感仪器观测图像上可能为激光信号的疑似目标位置;
[0060]
判断激光数据是否包含有效激光信号,排除不存在激光信号的数据;
[0061]
计算激光亚像元位置;
[0062]
通过将所述激光亚像元目标位置与激光站的理论成像位置进行比对以进行定位精度检验;
[0063]
基于所述定位精度检验结果,进行图像定位修正或图像导航。
[0064]
本发明具有以下技术效果:
[0065]
本发明实施例的利用地面激光对静止卫星光学图像导航和定位检验的方法,通过合理布局建立多个地面激光站,通过多个激光站与遥感仪器进行激光信号交互,从而利用这些标称的激光地理信息在图像中的偏差,解算遥感仪器视轴指向的失配角,实现图像导航和定位精度检验。不仅能够适用于目前静止轨道卫星上多种光学观测仪器,例如:闪电成像仪、扫描成像仪和红外大气垂直探测仪;而且,涵盖了从激光站选址、激光站设计、激光站参数设计、星地一体化观测模式设计、导航模型和定位精度检验算法等,从而形成一整套完整方案,以提高对卫星图像进行导航和定位精度检验的效果。
附图说明
[0066]
图1为本发明实施例提供的利用地面激光对静止卫星光学图像导航和定位检验的方法流程图;
[0067]
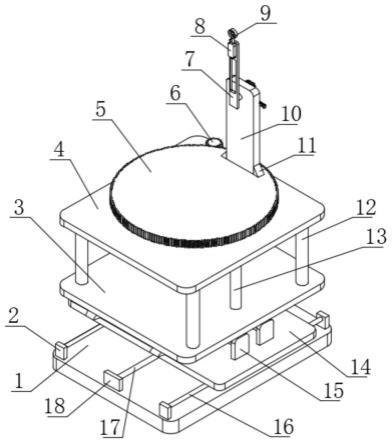
图2为激光站的硬件组成示意图;
[0068]
图3为激光站的信息交互流程图;
[0069]
图4为多个激光站与遥感仪器进行激光信号交互的流程图;
[0070]
图5为地面激光导航观测的几何关系示意图;
[0071]
图6为激光数据的处理流程图。
具体实施方式
[0072]
下面结合附图和具体实施例对本发明的技术内容进行详细具体地说明。
[0073]
图1所示为本发明实施例提供的一种利用地面激光对静止卫星光学图像导航和定位检验的方法,具体包括步骤s1~s5:
[0074]
s1:根据设定条件选取多个激光站的设置点,以使多个设置点呈设定形状分布。
[0075]
本实施例中,为实现对静止轨道卫星上的遥感仪器的图像进行导航和定位精度检验,要考虑地面激光站个数及位置分布,以及与遥感通道波长相关的激光源的选定。此外,还需考虑激光站的气候条件、遮挡情况、供配电、网络/通信能力、基础设施状况、交通与试验环境等诸多方面。
[0076]
具体地,激光站个数:若以遥感仪器图像定位偏差校正或导航为目的,需要通过图像中的多点像元偏差反算遥感仪器的指向误差,则需要至少3个激光站。若以检验遥感仪器的图像定位精度为目的,则需至少1个激光站。其中,每个激光站中配置的激光源种类和数量,取决于遥感仪器的类别与观测通道波长。
[0077]
激光站分布:从定位偏差参数解算的角度出发,多个激光站优选为呈三角分布,基线越大越好。考虑到国外建站的难度,充分利用我国陆地辽阔的优势来选址,以保证各激光站分布的合理性。
[0078]
气候情况:激光受降雨、降雪、云等气象因素影响较大,为确保卫星上的遥感仪器能够接收并有效识别地面发射的激光信号,选取设置点时需要考虑当地的气候特征。通过分析当地的降雨、降雪和云等历史观测数据,优选降雨少、降雪少、云量少、水汽少的地区。此外,为了保证设备安全及激光发射装置较高的指向精度,在考虑气候条件时还需选取大风天气较少的地点。
[0079]
遮挡情况:确保激光信号不受周边地形、建筑物等的遮挡。
[0080]
供配电:激光站应能够提供稳定的电力,市电供电优先。
[0081]
网络/通信能力:因远程控制和激光设备工作状态等数据的传输需求,需要稳定的通信条件。
[0082]
基础设施状况:确定现有基础设施条件是否满足建设激光站的要求,例如:地基平整度、稳固性、面积、洁净度等。
[0083]
交通与试验环境:交通运输、设备安装、调试、星地联试以及长期维护的便利性。
[0084]
s2:在每一个设置点,根据卫星上的遥感仪器的类型设置激光站,以使任意一个激光站均能够对应一种或多种类型的遥感仪器。
[0085]
参照图2所示,本实施例中,激光站包括激光器与光学发射子系统、通信与控制子系统、望远镜及指向控制子系统、激光和卫星对准辅助子系统、激光站管控子系统、天文圆顶和超净室共七部分。
[0086]
具体地,激光器与光学发射子系统包括激光源、驱动电源、望远镜控制器、温度控制器、激光波长稳定器、光学组件、功率计和波长计。该子系统用于发射指定中心波长的连续或脉冲激光信号,并对激光输出功率、波长进行实时监测。
[0087]
通信与控制子系统包括服务器、系统状态监测模块、工作控制模块和通信模块。该子系统用于进行工作指令的发送、状态监测和数据采集;
[0088]
望远镜及指向控制子系统包括激光发射望远镜、地平式经纬仪、望远镜指向参数计算与标校、星敏感器、激光指向精密调整、望远镜电控机箱。该子系统用于激光扩束与准直、激光发射望远镜精度指向参数计算和标校、以及精度控制和卫星跟踪。其中,激光发射望远镜是激光发射执行光学机构,对激光束进行准直扩束,控制激光发散角,使到达卫星处的光斑尽可能小,以保证有较高的激光功率密度,满足遥感仪器探测激光信号的信噪比。用于中波红外和长波红外波段激光工作的激光发射望远镜系统可共用,通过望远镜光学系统的综合设计,可以实现中波/长波红外和可见光/近红外激光均具备较高的发射效率。考虑天文效应的影响,指向参数的精度要达到角秒级。
[0089]
设置激光和卫星对准辅助子系统,激光和卫星对准辅助子系统包括观测望远镜、中继光路模块、回波信号检测模块、微光ccd图像瞄准处理模块和地靶瞄准矫正模块。当激
光发射系统调试完成后,利用该子系统能够将激光与卫星进行对准。
[0090]
激光站管控子系统用于控制激光站的开启与关闭。其中,针对不同遥感仪器的任务,激光站工作方式不同(例如:多个激光站而且发射或某个激光站单独发射),发射激光的波长也不同,为此,需要配置激光站管控子系统。
[0091]
天文圆顶用于密封或打开激光发射望远镜所处空间。其中,天文圆顶是激光发射望远镜的保护设备,当激光站不工作时提供密闭环境;激光站工作时,天文圆顶自动打开。
[0092]
超净室用于为各个子系统提供安装环境,从而为激光站提供温度、湿度和洁净度的保障,一般要求达到万级标准的要求。
[0093]
如图3所示,具体使用时,首先根据遥感仪器的导航和定位精度检验需求,通过激光站管控子系统控制各激光站中哪些激光站需要开启(例如:若需要通过图像中的多点像元偏差反算遥感仪器的指向误差,则需要至少开启3个激光站,若需要检验遥感仪器的图像定位精度,则需要至少开启1个激光站)。然后,该激光站管控子系统将数据包发送至通信与控制子系统,以通过服务器中的数据解析模块对数据包进行数据解析。
[0094]
经过解析后的数据会发送至服务器中的激光器指向生成模块和系统程控模块,以通过激光器指向生成模块向望远镜及指向控制子系统发送激光器指向指令,并通过系统程控模块向激光器与光学发射子系统发送激光器发射时机。
[0095]
望远镜及指向控制子系统与激光和卫星对准辅助子系统连接,当望远镜及指向控制子系统接收该激光器指向指令后,通过激光和卫星对准辅助子系统的激光指向修正单元将激光与卫星进行对准;而且,该望远镜及指向控制子系统将调整的角度信息反馈至通信与控制子系统的角度信息处理模块。
[0096]
激光器与光学发射子系统与望远镜及指向控制子系统连接,当该激光器与光学发射子系统接收该激光器发射时机后,通过望远镜及指向控制子系统调整激光器的发射角度,然后,根据该激光器发射时机进行激光发射。在此期间,通过激光稳频检测单元对激光的稳定性进行检测;而且,激光器与光学发射子系统将激光器的运行状态实时反馈至通信与控制子系统的系统状态监测模块。
[0097]
最后,该系统状态监测模块与角度信息处理模块分别将激光器的运行状态以及激光器调整的角度信息发送至数据整合模块进行整合,通过该数据整合模块将整合后的数据包反馈至激光站管控子系统,完成整个激光站的信息交互过程。
[0098]
s3:根据遥感仪器的导航和定位需求,对激光站进行参数设置。
[0099]
当完成对激光站的硬件设置后,需要根据遥感仪器的导航和定位需求,对激光站进行参数设置。本实施例中,该参数至少包括:激光源工作波长、激光源发射模式、激光发射功率的范围、功率稳定度、激光发散角、发射望远镜口径、指向控制精度、指向测量精度、指向稳定度、扫描方式以及持续工作时长。
[0100]
具体地,对激光站的参数设置如下:
[0101]
(1)设置激光源工作波长,以使激光源中心波长与卫星上遥感仪器的波长一致。
[0102]
(2)设置激光源发射模式,其中,该发射模式至少包括连续发射模式和脉冲发射模式。连续发射模式指的是激光源发射连续激光信号,脉冲发射模式指的是激光源发射脉冲激光信号。
[0103]
(3)设置激光发射功率的范围;其中,激光发射功率的最小值根据遥感仪器的灵敏
度确定,激光发射功率的最大值以响应不饱和的原则确定(因激光很难做到大功率,因此一般不考虑最大值)。
[0104]
该最小激光发射功率的具体计算过程如下:
[0105]
激光传输系统的几何效率可定义为:
[0106]
其中,a
tele
为卫星上仪器光学望远镜的口面面积,a
laser
为激光束传输至卫星轨道高度时的光斑面积:
[0107][0108]
上式中,h为激光站到卫星的距离,θ为发散角。计算得到激光传输系统的几何效率为:
[0109][0110]
式中,dr为卫星上遥感仪器光学望远镜口面直径。仪器光电探测器接收到的激光功率为:
[0111]
p
receive
=η1·
η2·
η3·
p0·k[0112]
其中,p0为激光发射功率,η1为大气透射率,η3为发射效率。因需要计算的是到达遥感仪器光电探测器前的光功率,所以需要乘以遥感仪器在对应波段的光学效率,k为遥感仪器对激光器工作波长的透过率。
[0113]
根据前述计算,得到探测器的热噪声功率nep和地面的背景辐射噪声功率w
p
。nep是探元的本底噪声,由遥感仪器的灵敏度计算得到;w
p
是将地球作为一个黑体的辐射源,在仪器探测元上的功率响应,利用普朗克黑体辐射公式计算。
[0114]
在前述给定的激光功率和发射参数条件下,计算得到系统的信噪比snr:
[0115][0116]
一般认为,信噪比至少在3以上可满足遥感仪器的探测要求。根据以上步骤,可以计算获得满足需求的激光站的最小发射功率。
[0117]
(4)设置功率稳定度;功率稳定度包括短期稳定度和长期稳定度,其中,短期稳定度尤其重要,是考虑的主要因素。
[0118]
(5)设置激光发散角;其中,激光发散角过大会减小激光到达卫星仪器的能量密度,激光发散角过小则要求激光发射望远镜具有非常高的对卫星指向精度,确保卫星始终处于激光束的照射范围内,因此,可根据实际需要对激光发散角进行综合设计。
[0119]
(6)设置发射望远镜口径。
[0120]
发射望远镜的口径主要取决于发射激光的束腰直径。激光器的光束质量因子m2为:
[0121][0122]
m2是激光光束质量,表征激光远场传输特性,是一个无量纲的参数,值越小越好,m2值为1时,激光光束达到衍射极限,光束质量达到最好,远场传输特性好。式中,d为发射激光
束的束腰直径,θ为发射激光束腰处的发散角,d0、θ0分别为理想基模高斯光束的光束直径和发散角,d0、θ0的关系由下式决定:
[0123][0124]
λ为激光波长,结合前两式计算发射激光束的束腰直径:
[0125][0126]
因此,为保证一定的发射效率,可取发射激光束的束腰直径的两倍,做为发射望远镜的口径。
[0127]
(7)设置指向控制精度、指向测量精度、指向稳定度。其中,激光站根据卫星轨道预报数据,精确计算指定观测时刻的激光望远镜的俯仰角和方位角,光学机构的控制系统自动调整指向角度,向卫星发射激光,指向控制精度、指向测量精度和指向稳定度均按不大于激光发散角的1/10进行设计。
[0128]
(8)设置扫描方式,其中,扫描方式以固定俯仰角、固定方位角的方式设置。在设备操作模式中,需要设计小范围扫描方式,以使得操作人员可通过微光ccd的图像找到卫星。
[0129]
(9)设置持续工作时长,具体地,该持续工作时长与卫星上的遥感仪器相关,根据不同类型的遥感仪器进行适应性设置即可。
[0130]
s4:通过多个激光站与遥感仪器进行激光信号交互,以对卫星图像进行精准导航和定位检测。
[0131]
具体地,参照图4所示,通过多个激光站与遥感仪器进行激光信号交互具体包括步骤s41~s45:
[0132]
s41:获取遥感仪器的定位精度检验需求;其中,该定位精度检验需求可以是一个遥感仪器的定位精度检验需求,也可以是多个遥感仪器的定位精度检验需求。
[0133]
s42:根据定位精度检验需求,设置星地观测模式;其中,星地观测模式至少包括:参与信号交互的激光站的数量、各激光站使用的激光源、各激光站与卫星的对应关系、以及各激光站的开关机时间;
[0134]
s43:控制各激光站的观测望远镜指向卫星,并开启激光器进行观测;
[0135]
s44:控制各激光站的激光器停止观测,并获取在激光器开启期间,遥感仪器返回的激光信号;
[0136]
s45:对激光信号进行数据处理,以根据数据处理结果对卫星图像进行导航和定位检测。
[0137]
下面具体说明对激光信号进行数据处理的过程:
[0138]
s451:对激光信号进行亚像元激光位置提取,以获得激光位置偏差;
[0139]
s452:通过多个激光站的位置偏差推算卫星在滚动、偏航、俯仰三个方向的等效失配角。
[0140]
具体地,如图5所示,在地固坐标系中,根据地球表面被遥感点位置矢量卫星位置向量是求取其对应的视向量是其中,
[0141]
根据激光站的理论位置矢量与地球表面被遥感点位置矢量得到矢量偏差
则理论位置矢量所对应的视向量为:所对应的视向量为:
[0142]
将地固坐标系中的所有矢量旋转至轨道坐标系中,则将地固坐标系中的所有矢量旋转至轨道坐标系中,则其中,t
eci2orb
、t
ecr2eci
分别是惯性坐标系到轨道坐标系及地固坐标系到惯性坐标系的转换矩阵;遥感仪器坐标系用inst表示;卫星本体坐标系用sat表示;轨道坐标系用orb表示;惯性坐标系用eci表示;地固坐标系用ecr表示。
[0143]
在轨道坐标系内求视向量的单位向量;
[0144][0145]
将遥感仪器的坐标系中的视向量通过t
inst2sat
转换到卫星本体坐标系,再通过t
sat2orb
旋转至轨道坐标系下,则:
[0146][0147]
其中,op为遥感仪器的视向量,α,β分别为遥感仪器的东西向扫描角和南北向步进角;t
sat2orb
、t
inst2sat
分别是卫星本体坐标系到轨道坐标系及遥感仪器的坐标系到卫星本体坐标系的转换矩阵;
[0148]
通过公式(1)和公式(2),得到:
[0149][0150]
通过公式(3)计算得到卫星在滚动、偏航、俯仰三个方向的等效失配角;其中,ξr,ξy,ξ
p
分别为滚动、偏航、俯仰三个方向的等效失配角。
[0151]
s453:利用卫星在滚动、偏航、俯仰三个方向的等效失配角对卫星图像进行导航;并通过将亚像元激光位置与预设位置相比较,对卫星图像进行定位精度检验。
[0152]
具体包括步骤s4531~s4532:
[0153]
s4531:利用卫星在滚动、偏航、俯仰三个方向的等效失配角对卫星图像进行导航包括:
[0154]
根据卫星在滚动、偏航、俯仰三个方向的等效失配角,对卫星指向的位置进行精准定位;或,根据卫星在滚动、偏航、俯仰三个方向的等效失配角,获取卫星的扫描镜指向角,并通过控制链路发送至卫星,以引导遥感仪器进行指向修正。
[0155]
具体地,本实施例中,当得到卫星在滚动、偏航、俯仰三个方向的等效失配角后,可以有两种处理方式。第一种处理方式是利用卫星在滚动、偏航、俯仰三个方向的等效失配角,对卫星指向的位置进行精准定位。在该处理方式中,不会对遥感仪器的光轴进行修正,只是提高了对卫星指向位置的定位精度,以实现精准定位。
[0156]
第二种处理方式是利用卫星在滚动、偏航、俯仰三个方向的等效失配角计算出卫星的扫描镜指向角,然后,基于该卫星的扫描镜指向角引导遥感仪器进行指向修正,从而使
得卫星遥感仪器的光轴能够指向准确的位置。
[0157]
s4532:通过将亚像元激光位置与预设位置相比较,对卫星图像进行定位精度检验,参照图6所示,具体包括以下步骤:
[0158]
(1)获取任务信息
[0159]
读取激光数据文件中的数据内容和激光任务信息,根据任务信息圈选出m
×
m大小的数据内容r。
[0160]
(2)根据任务信息,获取目标位置
[0161]
对于不同的观测仪器,激光信号对原信号的影响不同,例如对地观测的红外成像仪器,激光信号导致红外波段亮温降低;对于垂直探测仪器,激光信号则导致红外波段亮温升高;根据不同仪器观测数据的特点,通过遍历激光观测数据r,获取成像仪器最小dn值或探测仪器最大亮温值像元位置d0。
[0162]
(3)判断激光数据是否包含有效激光信号,排除不存在激光信号的数据
[0163]
通过分析数据大小以及与周围数据的关系,判断该激光数据是否包含有效激光信号,筛选排除不存在激光信号的数据,继续分析存在激光信号的数据;通过这一步处理,可有效剔除虚假信号,确保下面提取出的亚像元位置为有效信号的位置,降低虚警率。下面对不同类型的载荷进行详细分析;
[0164]
①
成像类仪器
[0165]
根据成像类仪器的数据特点,对多次激光观测数据进行统计分析,设计合理的激光信号判断阈值,判断最小亮温值是否大于阈值,并计算d0与其周围n
×
n(n≤m)范围最小数据的差值特点,分析激光观测数据中是否存在有效激光信号。
[0166]
通过统计分析成像仪器激光数据,结合模拟仿真激光成像结果得出规律,获得的最小dn值位置d0位于激光站发射激光点的理论位置附近,选取以d0为中心的n
×
n(n≤m)区域的数据进行分析:
[0167]
当d0与最大dn值的差值大于阈值一,且n
×
n范围内数据的平均值与d0差值大于阈值二时,激光数据仿真图像的激光信号最为明显,即
[0168][0169]
其中,value
min(nxn)
表示n
×
n范围内的最小dn值,value
max(nxn)
表示n
×
n范围最大dn值,average
nxn
表示n
×
n范围数据的平均值。阈值一和阈值二需通过对大量激光观测数据的分析,获取适用于该仪器观测数据的取值。
[0170]
当d0与最大dn值的差值处于阈值三到阈值一之间,且n
×
n范围内数据的平均值与d0差值处于阈值四到阈值二之间时,激光数据仿真图像的激光信号较模糊,即
[0171][0172]
阈值三和阈值四需通过对大量激光观测数据的分析,获取适用于该仪器观测数据的取值。
[0173]
c.当d0与最大dn值的差值小于阈值三,且n
×
n范围内数据的平均值与d0差值小于
阈值四时,激光数据仿真图像基本无激光信号,即
[0174][0175]
为了使地基激光辅助定位系统的处理结果更好地服务于图像定位精度检验,基于以上分析,将激光数据分为以下三种等级,即,将第一种清晰激光数据作为一级数据,将第二种模糊激光数据作为二级数据,并淘汰无激光数据,不再进行进一步计算。需根据激光辅助定位结果提高定位精度时需选取最为准确的一级数据;仅用于常规定位精度监测时可酌情使用一二级数据。
[0176]
②
探测类仪器
[0177]
由于探测仪器红外波段的焦平面往往存在缝隙,而且可能为不均等缝隙,因此,仅对探测仪器的步进观测任务数据进行数据分析。由于每个任务中可形成多个激光观测文件,对单次激光采样数据文件进行遍历与分析,判断获取的最大亮温值与n
×
n区域内数据的平均值关系:
[0178]
当最大亮温值与区域平均数的差值百分比大于阈值五时,激光信号明显,即,
[0179][0180]
其中,value
max
表示最大亮温值,averagen×n表示n
×
n区域内数据的平均值。阈值五需通过对大量激光观测数据的分析,获取适用于该仪器观测数据的取值。
[0181]
当最大亮温值与区域平均数的差值百分比位于阈值六到阈值五之间时,激光信号不明显或存在无激光情况,即,
[0182][0183]
阈值六需通过对大量激光观测数据的分析,获取适用于该仪器观测数据的取值。
[0184]
当最大亮温值与区域平均数的差值百分比小于阈值六时,无激光信号,即,
[0185][0186]
(4)计算激光亚像元位置
[0187]
对存在激光观测数据的数据文件,根据激光数据特点,通过设计算法,计算并输出激光点所在亚像元位置,需要根据载荷特色设计不同的算法。
[0188]
①
成像类仪器
[0189]
根据成像仪器激光观测数据的特点,成像仪器激光数据离散情况较小,针对单个激光任务的数据量较大。而且,由于激光本身的特点,激光数据对成像仪器图像的影响范围较为集中,并受到外界干扰较小。因此,以重心法为基础,对成像仪器的激光观测数据进行处理。
[0190]
以最小dn值所在位置d0为中心,扩充n
×
n区域(根据激光信号在仪器观测图像上的成像特点确定n的取值),通过sobel算子,将区域划分为内部像素区域s1(像素数n1)与边缘像素区域s2(像素数n2),根据灰度重心法,计算获得激光的数据中心为
[0191][0192][0193]
其中,u表示激光点行数,v表示激光点列数,内部像素区域中第i个像素坐标表示为(x
s1,i
,y
s1,i
),像素dn值是p(x
s1,i
,y
s1,i
),边缘像素区域中第j个像素坐标表示为(x
s2,j
,y
s2,j
),像素dn值是p(x
s2,j
,y
s2,j
)。
[0194]
②
探测类仪器
[0195]
针对探测类仪器的不同特点,根据探测仪器的指向角度数据,以第一条指令焦平面的第一元左上角为原点,将整组激光步进观测任务中每次的焦平面对应在同一坐标系中。
[0196]
基于一组激光数据的所有采样结果,对数据进行遍历,并对数据进行筛选。假定一组激光中存在m个采样点,每个采样点包含n
×
l组数据,对一组激光数据进行筛选获得新的激光数据。
[0197][0198]
其中,vlauej×
l,i
表示第i个采样点中的第j行第l列的亮温值,表示整个激光数据的平均值,value
′j×
l,i
表示筛选后的新激光值。
[0199]
根据新的激光值数据结果,进行加权中心求解中心点,即:
[0200][0201][0202]
(5)定位精度检验
[0203]
具体地,通过坐标变化,计算实际激光点所在经纬度位置,并通过对比理论激光点在图像上的行/列号或经/纬度与求解得到的激光点在图像上的行/列号或经/纬度的差值a/b,获得高精度图像定位检验结果
[0204]
(6)图像定位修正
[0205]
基于定位精度检验结果,进行图像定位修正或图像导航。
[0206]
综上所述,本发明所提供的利用激光对卫星图像进行导航和定位精度检验的方法,不仅能够适用于目前静止轨道卫星上多种观测仪器,例如:闪电成像仪、扫描成像仪和红外大气垂直探测仪;而且,涵盖了从激光站选址、激光站设计、激光站参数设计、星地一体化观测模式设计、导航模型和定位精度检验算法等,从而形成一整套完整方案,以提高对卫
星图像进行导航和定位精度检验的效果。
[0207]
上面对本发明所提供的利用地面激光对静止卫星光学图像导航和定位检验的方法进行了详细的说明。对本领域的一般技术人员而言,在不背离本发明实质内容的前提下对它所做的任何显而易见的改动,都将构成对本发明专利权的侵犯,将承担相应的法律责任。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。