1.本发明属于草方格铺设机械技术领域,更具体地,涉及一种基于莱洛三角形的草方格铺设车。
背景技术:
2.全国沙漠、戈壁和沙漠化土地约为165.3万km2,其中人类活动导致的沙漠化土地约有37万km2。我国政府十分重视防治荒漠化工作,早在2002年启动了治沙工程,近年来更是随着国际合作的推进而不断创新治沙方式,但是土地荒漠化形式依然严峻。
3.我国经过多年反复试验,摸索出铺设草方格可有效地实现防沙治沙的经验方法。草方格铺设技术是用麦草、稻草、芦苇等农业废草料在沙漠中扎成方格,网状的草方格有效地降低了近地面风速,阻挡了风吹沙扬,防止沙丘移动,同时还可涵养水分,形成土壤结皮,为之后的进一步治沙做铺垫。根据实验得知,防沙效果最好的草方格尺寸为:1m
×
1m,麦草露出地面10-20cm,麦草陷入地面10-20cm。
4.目前的草方格铺设方式主要采用人工铺设以及新兴的大型机械化作业方式,然而这两种铺设方式目前都存在不足之处。人工铺设步骤繁琐、效率低下,且人力成本较高,同时铺设质量差,由于采用散草铺设,故人工不能准确的确定间隔以及铺设深度,使草方格寿命降低,防沙效果大打折扣。大型机械铺设由于受环境限制,二次能源较为短缺,能源输送成本高,且沙漠环境多变,限制极大。同时,机械铺设存在草方格寿命不高的问题。
技术实现要素:
5.为了克服上述技术问题,本发明提出了一种基于莱洛三角形的草方格铺设车,本发明基于莱洛三角形结构,以草卷为原料,设计出一款挖槽-铺设-固草一体化的沙障铺设装置,实现草方格的铺设。同时,小型机械的使用可以使装置进入到部分地形复杂,如沙漠公路等不适合大型草方格铺设机械进入的地区。
6.本发明采用的技术方案如下:
7.一种基于莱洛三角形的草方格铺设车,包括莱洛旋转模块、铲刀模块、储草模块、铺草-固草模块、切草模块、移动模块和控制模块;
8.其中,所述莱洛旋转模块用于构成正方形轨迹,使得装置能够铺设正方形草方格;
9.所述铲刀模块固定于莱洛旋转模块上,进行正方形沙槽的构建;
10.所述储草模块固定于莱洛旋转模块中心位置,用于储存草卷;
11.所述铺草-固定模块用于将草卷插入沙槽中,同时将沙子填入间隙,固定草卷;
12.所述切草模块用于将铺设完一单元草方格后将草卷切断,准备下一单元铺设;
13.所述移动模块用于装置整体在沙漠地区中的移动;
14.所述控制模块可以实现草方格路径规划,同时控制所述莱洛旋转模块、铲刀模块、储草模块、铺草-固草模块、移动模块各电器件工作启停。
15.进一步地,所述莱洛旋转模块包括莱洛三角板、滑块、轨道、中轴机构;
16.所述莱洛三角形板的三个顶点处分别安装两个铲刀模块和一个铺草-固草模块,所述中轴组件驱动所述莱洛三角板运动构成正方形轨迹,所述中轴组件包括第一步进电机、第二步进电机、连接轴和连接法兰,所述第一步进电机通过电机架与车架固定连接,第二步进电机与第一步进电机通过连接轴连接,所述莱洛三角形板通过连接法兰与所述第二步进电机连接,其中所述第二步进电机带动所述莱洛三角形板以所述第二电机的电机轴线为中心自转,第一步进电机带动所述莱洛三角形板以所述第一电机的电机轴线为中心公转;所述莱洛三角形板三个顶点处分别安装滑块,所述滑块与所述轨道之间通过滚轮连接,运动时滚轮与轨道进行接触,支撑滑块和莱洛三角形板;所述连接轴上安装导电滑环。
17.进一步地,所述连接轴连接调整台,第二电机固定在第二步进电机安装板上与所述调整台连接,所述调整台弥补安装加工和安装过程中的中心距误差。
18.进一步地,所述铲刀模块包括第一舵机、铲刀以及固定块,所述固定块与滑块之间固定连接,与铲刀之间通过花键连接,花键由舵机控制旋转,在开刀和收刀时由舵机控制旋转进行开刀和收刀。
19.进一步地,所述储草模块包括铝型材框架、亚克力支撑板、亚克力旋转版、轴承座、旋转轴、限位环,储草模块位于莱洛三角板的下方,用于储放铺草所用草料,所述铝型材框架与莱洛三角板固定连接,铝型材框架下方固结横槽,所述亚克力支撑板安装在所述横槽中科滑动,轴承座与亚克力板固定连接,旋转轴穿过所述轴承座,限位环通过螺栓安装在旋转轴上,限制旋转板上下运动。
20.进一步地,所述铺草-固草模块包括机械爪、引导片、摩擦轮和电动马达,所述引导片上方与安装板连接,前方安装有电动马达和摩擦轮,后方安装有机械爪,中间为引导片,机械爪用于将槽两侧由于开槽推出的沙子推向中间的草卷,同时加固草卷和沙子,摩擦轮用于将草卷挤出,挤到引导片上,由引导片导向后进入槽中。
21.进一步地,所述机械爪包括支架、第二舵机、齿轮、爪子、螺柱、推沙板,所述爪子两个,其上方分别固接齿轮,下方固接推沙板,两爪子的齿轮相互啮合由所述第二舵机驱动,所述第二舵机安装在支架上,所述爪子上设有螺柱。
22.进一步地,所述切草模块固定在轨道外的铝型材上,包括曲柄连杆往复机构和切刀,曲柄连杆往复机构使得切刀能够进行轴向运动,切刀安装在往复机构末端,进行草卷切断。
23.进一步地,所述移动模块包括实心轮胎、第三步进电机和铝型材车架,实心轮胎与第三步进电机连接,由第三电机控制装置整体移动。
24.进一步地,所述控制模块包括rpi控制板,arduino uno控制板,l298n驱动板、 tb6600驱动板、霍尔编码器和gps模块,其中arduino作为主控板,l298n驱动板和 tb6600驱动板作为电机驱动板,rpi用于转换由上位机发送地位置信息为工作信息发送给arduino,霍尔编码器用于反馈电机运行状况,gps模块采用at6558芯片用于实现对装置的定位,检验装置运行的情况,arduino用于向电机驱动板发出运动命令,协作完成装置的工作和运动。
25.与现有技术相比,本发明具有如下优点:
26.本发明运用小型机械可以提高草方格铺设的灵活性,完成大型机械无法进入的复杂地形的草方格铺设任务。装置通过莱洛三角形构成正方形轨迹,使得草方格形状较为稳定,进一步保证草方格寿命和防风固沙效果,同时,本发明单元铺设的概念使得装置可以按
需铺设,具有较好的铺设独立性。
附图说明
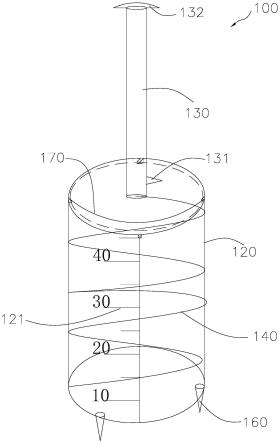
27.图1为本发明整体结构示意图;
28.图2为莱洛旋转模块、铲刀模块、铺草-固草模块整体结构示意图;
29.图3为本发明莱洛旋转模块示意图;
30.图4为本发明莱洛旋转模块轨道示意图;
31.图5为本发明铲刀模块示意图;
32.图6为本发明储草模块示意图;
33.图7为本发明铺草-固草模块示意图;
34.图8为本发明储草模块所用机械爪示意图;
35.图9为本发明切草模块示意图;
36.图10为本发明移动模块示意图;
37.图11为本发明控制模块设计图;
38.图12为本发明工作区域划分图;
39.图13为本发明工作流程图。
40.图中,1-莱洛旋转模块、101-第一步进电机、102-电机架、103-连接轴、104-导电滑环、105-调整台、106-第二步进电机、107-连接法兰、108-第二步进电机安装板、109-莱洛三角形板、110-轨道、111-滑块、112-滚轮,2-铲刀模块、201-第一舵机、202-铲刀、203-固定块,3-储草模块、301-铝型材框架、302-亚克力支撑板、 303-亚克力旋转板、304-轴承座、305-旋转轴、306-限位环,4-铺草-固草模块、401
‑ꢀ
摩擦轮、402-电动马达、403-机械爪、4031-支架、4032-第二舵机、4033-齿轮、 4034-爪子、4035-螺柱、4036-推沙板、404-引导板,5-切草模块、501-曲柄连杆往复机构、502-切刀,6-移动模块、601-铝型材车架、步进电机602和车轮603602-步进电机、603-车轮、7-控制模块。
具体实施方式
41.为了使本发明实施例所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
42.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
43.在本发明的描述中,除非另有说明,术语“连接”应做广义理解,例如可以是固定连接,也可以是可拆卸连接,或一体地连接。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
44.实施例:
45.结合图1至图12,本发明提供一种基于莱洛三角形的草方格铺设车。
46.如图1所示,基于莱洛三角形的草方格铺设车,包括莱洛旋转模块1、铲刀模块 2、
储草模块3、铺草-固草模块4、切草模块5、移动模块6和控制模块7。其中,莱洛旋转模块1用于构成正方形轨迹,使得装置能够铺设正方形草方格;铲刀模块2固定于莱洛旋转模块1上,进行正方形沙槽的构建;储草模块3固定于莱洛旋转模块中心位置,用于储存草卷;铺草-固定模块4用于将草卷插入沙槽中,同时将沙子填入间隙,固定草卷;切草模块5用于将铺设完一单元草方格后将草卷切断,准备下一单元铺设;移动模块6用于装置整体在沙漠地区中的移动;控制模块7可以实现草方格路径规划,同时控制所述莱洛旋转模块、铲刀模块、储草模块、铺草-固草模块、移动模块各电器件工作启停。
47.如图2-4所示,莱洛旋转模块包括第一步进电机101、电机架102、连接轴103、导电滑环104、调整台105、第二步进电机106、连接法兰107、第二步进电机安装板 108、莱洛三角形板109、轨道110、滑块111、滚轮112。莱洛三角板作为主体,莱洛三角板109的三个顶点处安装三个滑块111,控制滑块111在轨道110上运动,滑块 111与轨道110之间通过滚轮112进行连接,运动时滚轮112与轨道110进行接触,支撑滑块111和莱洛三角板109。滑块111的下方是工位,由铝型材与工位进行连接,三个工位上分别安装有两个铲刀模块和1个铺草-固草模块。莱洛三角形的下方是储草模块,通过铝型材与储草模块连接。中轴机构驱动莱洛三角板运动,包括第一步进电机101、第二步进电机106、调整台105、导电滑环104、连接轴103和连接法兰 107。第一步进电机101通过电机架102和螺栓与车架铝型材连接,第二步进电机106 与第一步进电机101通过连接轴103和调整台105连接,调整台105可以弥补安装加工和安装过程中的中心距误差,其中调整台105可以有滑块和导向杆组成,连接法兰连接第一步进电机和莱洛三角形板。导电滑环安装在连接轴上,用于传输电力,避免旋转过程中电线缠绕问题。
48.如图5所示,铲刀模块包括第一舵机201、铲刀202和固定块203。固定块203与滑块之间通过铝型材连接,与铲刀202之间通过花键连接,花键由第一舵机201控制旋转,在开刀和收刀时由舵机控制旋转进行开刀和收刀。
49.如图6所示,储草模块包括铝型材框架301、亚克力支撑板302、亚克力旋转板 303、轴承座304、旋转轴305、限位环306。铝型材框架与莱洛三角形板通过螺栓相连。亚克力支撑板安装于铝型材横槽中,可以滑动,用于支撑草料和结构。亚克力旋转板与草卷直接接触,轴承座与支撑板通过螺栓相连,旋转轴穿过轴承座,限位环通过螺栓安装在旋转轴上,限制旋转板上下运动。
50.如图7所示,铺草-固草模块包括摩擦轮401、电动马达402、机械爪403和引导板404。摩擦轮受电动马达驱动,用于输出草卷。机械爪用于将两侧沙子往沙槽推送,固定草卷。引导片呈长条状,主要用于承载和引导。引导片上方与铝型材连接,前方安装有电动马达和摩擦轮,后方安装有机械爪,中间为引导片。机械爪用于将槽两侧由于开槽推出的沙子推向中间的草卷,同时加固草卷和沙子。摩擦轮用于将草卷挤出,挤到引导片上,由引导片导向后进入槽中。
51.如图8所示,机械爪主要包括支架4031、第二舵机4032、齿轮4033、爪子 4034、螺柱4035、推沙板4036。舵机驱动机械爪开合运动。推沙板固定在螺柱上,用于实现将沙子推入沙槽中。
52.如图9所示,切草模块主要包括曲柄连杆往复机构501和切刀502。曲柄连杆往复机构使得切刀能够进行轴向运动,切刀安装在往复机构末端,进行草卷切断。
53.如图10所示,移动模块主要包括铝型材车架601、步进电机602和车轮603。移动模块驱动装置在沙地中进行整体运动。
54.如图11所示,本装置采用arduino uno为主控板,主控板用于给主轴步进电机的 tb6600驱动板和底盘步进电机的tb6600驱动板提供工作信号,两个驱动板的电压则由电源提供。主控板给主轴步进电机和底盘的步进电机提供工作信号的同时为两个工作舵机供电并提供工作信号。通过将底盘步进电机的转速反馈给安装在底盘电机上的编码器,将单个轮的速度反馈给主控板,进而实现pid控制。
55.如图12所示,根据莱洛三角形顶点将正方形划分成三个区域。
56.如图13所示,本发明工作流程如下:
57.首先莱洛四边形旋转模块开始运动,铲刀模块放下铲刀开始挖槽,铺草模块的摩擦轮开始将草卷输送到引导片。
58.第一阶段,莱洛三角形旋转模块转动,第一个铲刀模块进行第ⅰ区域的初次挖槽,第二个铲刀模块进行第ⅲ个区域的初次挖槽,铺草模块和固草模块不工作。第二阶段,莱洛三角形旋转模块继续转动,第一个铲刀模块进行第ⅱ区域的初次挖槽,第二个铲刀模块进行第ⅰ区域的二次挖槽,进一步增大槽的深度。铺草模块不工作。第三阶段,莱洛三角形旋转模块继续转动,第一个铲刀模块进行第ⅲ区域的二次挖槽,第二个铲刀模块进行第ⅱ区域的二次挖槽,铺草模块进行第ⅰ区域的铺草,草卷在摩擦轮的作用下被挤入槽中。固草模块进行第ⅰ区域的固草,机械爪将槽两侧的沙子推向中间,加固槽中的草卷。第四阶段,两个铲刀模块收刀,铺草-固草模块进行第ⅱ区域的铺草和固草。第五个阶段,两个铲刀模块收刀,铺草-固草模块进行第ⅲ区域的铺草和固草。到此,完成一个草方格的铺设,装置前进一个草方格距离,到达下一个铺设点,再进行下一个草方格的铺设,如此循环。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。