1.本发明属海洋渔业渔场预测技术领域,特别是涉及一种基于船位空间移动特征和航行轨迹的金枪鱼延绳钓渔场即时预测方法。
背景技术:
2.海洋包括极地海域蕴藏着极为丰富的鱼类和其它海洋生物资源,但是海洋中并非到处都有可供捕捞的密集鱼群或虾群分布,即广阔的海洋上并不是到处是渔场,对于渔场预测时效性是非常重要的。目前,基于船位的渔场预测和分析研究正逐步发展,但仍存在较多的问题,如船位与渔场的关系确定,船速、航向与渔场的内在联系机制尚不明确。如何获得即时的船位,以及查明船位空间移动特征与分布所对应的渔场好坏的匹配关系是亟需解决的难题。金枪鱼钓由于采用延绳钓作业方式,下钩数一般为3000~4000钩,下钩的船速较高,且下钩的距离可达60海里,当某艘渔船连续在小范围下钩,可初步判断为产量还可以。因此各个渔船的空间动态特征可以间接反映渔场和产量的高低。
3.本发明基于船位空间移动特征(包括分布、移动距离和方向、船位聚集等)参数来精准识别渔场的产量高低,建立一种金枪鱼延绳钓渔场即时预测方法,且不需考虑海况变化对渔场的影响,有助于船长或船队管理人员即时判断和指挥渔船去中心渔场捕鱼,提高生产效率。
技术实现要素:
4.本发明所要解决的技术问题是提供一种基于船位空间移动特征和航行轨迹的金枪鱼延绳钓渔场即时预测方法,能够归纳和总结捕鱼船的实时船位并自动识别渔场的位置并建立参数体系,为中心渔场即时预测奠定基础。
5.本发明解决其技术问题所采用的技术方案是:
6.一种基于船位空间移动特征和航行轨迹的金枪鱼延绳钓渔场即时预测方法,包括以下步骤:
7.(a)实时获取任一金枪鱼延绳钓渔场的全部船位数据集,船位数据来源于船位监控平台或ais系统,船位数据集包括作业位置(即经纬度)、航向(0~360度)、对地船速(即航速,节)等;针对任一金枪鱼延绳钓渔场的作业船只进行作业类型判别,根据船只属性或者船位轨迹来判定;
8.(b)所述船位轨迹在当地时间04:00-11:00时段航速为6.0-9.0节判定为下钩;所述船位轨迹在当地时间14:00-22:00时段航速为3.2~6.5节判定为起钩;所述下钩的船位轨迹以环形或直线型为主;
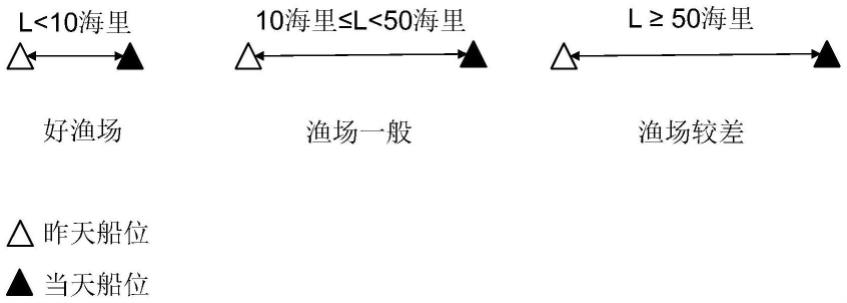
9.(c)当某艘船的下钩轨迹连续2天(昨天船位和当天船位)均在同一位置或两天的船位间距l不超过10海里,认为是好渔场;当下钩轨迹连续2天的船位间距l大于10海里且小于50海里,认为是渔场一般,需小范围转移渔场,此时从经济效益上仅能保持微利;当l大于
≥50海里时,认为渔场较差,需大范围转移渔场(见图1);
10.(d)根据昨天和当天的渔船船位起始时段的直线距离来判断渔场是否发生变化,若两天船位间距l小于10海里,则认为该位置是好渔场,其它渔船可进入到该位置钓鱼;所述昨天和当天的渔船船位起始时段主要以当地时间午夜12点为准;
11.(e)若船位间距l小于大于50海里则判定该位置为渔场较差,需避开,重新选择l小于10海里的船位位置来确定金枪鱼钓的好渔场;
12.(f)所述根据船位的空间移动来判断新的渔场,以同一公司或股东的船只移动方向预判好渔场的位置准确度更高;
13.(g)根据本发明的船位空间移动和航行轨迹进行渔场即时预测,准确率可达80%以上,且不需考虑海况变化对渔场的影响。
14.作为优选实施例,所述步骤(a)中的船位的位置频次为10分钟至1小时不等,所述船速精确至0.1节。
15.作为优选实施例,所述步骤(b)中的下钩和起钩船速变化范围在各个洋区渔场并不完全统一。
16.作为优选实施例,所述步骤(c)中渔船昨天的作业位置空间分布以下钩和起钩状态为准,非捕鱼状态的船位可剔除;当天的船位位置以其船速和轨迹特征属于下钩和起钩状态来判断,若在航行过程中,则需根据其航向和其它船只位置来预判其可能的捕鱼位置。
17.作为优选实施例,所述步骤(d)中的渔船作业起始位置直线距离可根据渔业服务系统直接测量,若渔船起始位置直线距离超过50海里,则不应再去该渔场,而是转移至新的渔场;除了避风和转载状态外,所述某一船的船速大于9节,可判定其正在转移渔场。
18.作为优选实施例,所述步骤(e)中的渔船作业起始位置直线距离可根据渔业服务系统直接测量,若渔船起始位置直线距离超过50海里,则不应再去该渔场,而是转移至新的渔场;除了避风和转载状态外,所述某一船的船速大于9节,可判定其正在转移渔场。
19.作为优选实施例,所述步骤(f)中渔场预测可实现每天1次或2次的短期预报,非常具有实用性。
20.作为优选实施例,所述步骤(g)中渔场预测可实现每天1次或2次的短期预报,非常具有实用性。
21.有益效果,由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:
22.1、采用船位可视化平台对渔场区船位的即时移动和分布特征进行分析,可非常方便、高效地预测渔场;
23.2、此种方法不需考虑海温、洋流和叶绿素等海况条件变化,只需掌握渔场区部分或整个船位分布特征就可判断是否需要转移作业区,且此次方法可推广至全球任一金枪鱼渔场,具有很强的普适性;
24.3、基于即时船位空间移动特征判断金枪鱼钓渔场的准确率很高,为金枪鱼钓渔场即时预测提供一种新的识别方法。
附图说明
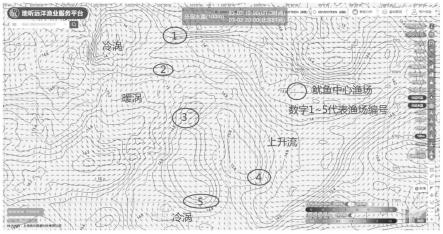
25.图1为本发明金枪鱼钓船船位空间移动和渔场关系示意图。
26.图2为基于金枪鱼钓船船位和航行轨迹变动的渔场预测及转移示意图。
具体实施方式
27.下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
28.实施例1:
29.如图1和图2所示,一种基于船位空间移动特征和航行轨迹的金枪鱼延绳钓渔场即时预测方法,包括以下步骤:
30.(a)实时获取任一金枪鱼延绳钓渔场的全部船位数据集,船位数据来源于船位监控平台或ais系统,船位数据集包括作业位置(即经纬度)、航向(0~360度)、对地船速(即航速,节)等;针对任一金枪鱼延绳钓渔场的作业船只进行作业类型判别,根据船只属性或者船位轨迹来判定;
31.(b)所述船位轨迹在当地时间04:00-11:00时段航速为6.0-9.0节判定为下钩;所述船位轨迹在当地时间14:00-22:00时段航速为3.2~6.5节判定为起钩;所述下钩的船位轨迹以环形或直线型为主;
32.(c)当某艘船的下钩轨迹连续2天(昨天船位和当天船位)均在同一位置或两天的船位间距l不超过10海里,认为是好渔场;当下钩轨迹连续2天的船位间距l大于10海里且小于50海里,认为是渔场一般,需小范围转移渔场,此时从经济效益上仅能保持微利;当l大于≥50海里时,认为渔场较差,需大范围转移渔场(见图1);
33.(d)根据昨天和当天的渔船船位起始时段的直线距离来判断渔场是否发生变化,若两天船位间距l小于10海里,则认为该位置是好渔场,其它渔船可进入到该位置钓鱼;所述昨天和当天的渔船船位起始时段主要以当地时间午夜12点为准;
34.(e)若船位间距l小于大于50海里则判定该位置为渔场较差,需避开,重新选择l小于10海里的船位位置来确定金枪鱼钓的好渔场;
35.(f)所述根据船位的空间移动来判断新的渔场,以同一公司或股东的船只移动方向预判好渔场的位置准确度更高;
36.(g)根据本发明的船位空间移动和航行轨迹进行渔场即时预测,准确率可达80%以上,且不需考虑海况变化对渔场的影响。
37.所述步骤(a)中的船位的位置频次为10分钟至1小时不等,所述船速精确至0.1节;
38.所述步骤(b)中的下钩和起钩船速变化范围在各个洋区渔场并不完全统一;
39.所述步骤(c)中渔船昨天的作业位置空间分布以下钩和起钩状态为准,非捕鱼状态的船位可剔除;当天的船位位置以其船速和轨迹特征属于下钩和起钩状态来判断,若在航行过程中,则需根据其航向和其它船只位置来预判其可能的捕鱼位置;
40.所述步骤(d)中的渔船作业起始位置直线距离可根据渔业服务系统直接测量,若渔船起始位置直线距离超过50海里,则不应再去该渔场,而是转移至新的渔场;除了避风和转载状态外,所述某一船的船速大于9节,可判定其正在转移渔场;
41.所述步骤(e)中的渔船作业起始位置直线距离可根据渔业服务系统直接测量,若
渔船起始位置直线距离超过50海里,则不应再去该渔场,而是转移至新的渔场;除了避风和转载状态外,所述某一船的船速大于9节,可判定其正在转移渔场;
42.所述步骤(f)中渔场预测可实现每天1次或2次的短期预报,非常具有实用性。
43.所述步骤(g)中渔场预测可实现每天1次或2次的短期预报,非常具有实用性。
44.下面结合一个具体的实施例进一步说明:
45.在印度洋南部公海,分布有金枪鱼延绳钓渔场,资源尚可,但随着渔船的增加,渔场变动较为频繁,小渔场较多,这就需要渔船船长或生产指挥人员及时掌控渔场渔船的精细变动才能较为及时、准确的预测好点的渔场,以便及时调度自己的船队,提高生产效率。一些新加入的渔船船长对渔场资源和海况了解的不深入,因此如何及时掌握渔船动态并据此判断渔场的位置是非常有必要的。大多数渔船船长捕捞经验多以尝试性探捕为主,未能形成及时的渔场识别能力和短期预报经验,本发明有助于实现这一目标。
46.首先,每天北京时间早上10点查看当天的该区域金枪鱼延绳钓渔船的全部船位空间分布,并分析昨天船位的航行、漂流、下钩、起钩等状态分析;
47.其次,根据渔船船位昨天的作业位置空间分布和当天的作业位置空间分布来判断渔场是否发生变动,即判断两天作业位置空间分布的重合度:重合度超过50%,则判断渔场没有发生变动;否则,渔场发生变动了,原渔场产量变差。然后根据昨天和今天的渔船作业结束时位置的直线距离大小来判断该小区域渔场是否保留,以l不超过10海里,则认为该海域今天将仍然是好渔场,若l大于50海里则必须避开此渔场位置;若l大于10海里但不超过50海里则需谨慎判定此处是否是好渔场;
48.最后,若判断某个船只向其它海域的同一公司的另一船只a靠近,且不属于转载、避风等情形,则基本可判断该公司的船只a有好的产量,即有渔场形成,则有九成把握预判此处是高产渔场,可以及时转移至船只a的位置。
49.因此,通过船位空间移动特征特别是船的航向、轨迹特征和航行速度预判某处是否是好的渔场非常有用,预报准确率也很高,我们在2021-2022年期间预报了近100期,预报准确率为80%以上,当资源较好的情况下预测准确率可达90%以上。
50.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。