一种基于固定时间稳定理论的移动机器人nmpc方法
技术领域
1.本发明涉及移动机器人技术领域,具体为一种基于固定时间稳定理论的移动机器人nmpc方法。
背景技术:
2.近年来,由于劳动力的短缺与劳动成本上涨等问题,越来越多的工厂与企业选择运用机器人来代替部分人工,帮助更快生产;随着电子通信、控制理论、电力电子、人工智能等技术的不断提高与发展,机器人系统的研究与应用已经成为行业研究热点,并受到广泛关注。其中,轮式移动机器人在物流运输、便民服务等方面都已经有了较为成熟的运用,快递公司里的货物运输传送机器人、银行里的引导型机器人,甚至在海底捞里的菜品运送机器人等等都是轮式移动机器人。由于其机械结构与控制模型比较简单直观,所以轮式移动机器人能够广泛运用于日常生活中。
3.在轮式移动机器人的问题当中,通常有点镇定问题、路径跟踪问题以及轨迹跟踪问题,这些是移动机器人的经典问题;其中,点镇定问题由于其存在brockett定理,即不存在连续光滑的纯状态反馈控制率,这在轮式移动机器人中是一个经典难题,并引起了许多学者的广泛关注;许多学者为克服这一难点提出了各种方法,但是,在设计控制域时并没有考虑到机器人本身受到的约束,如:状态约束、速度约束等;因此急需一种基于固定时间稳定理论的移动机器人nmpc(非线性模型预测控制)方法来解决上述问题。
技术实现要素:
4.本发明提供一种基于固定时间稳定理论的移动机器人nmpc方法,提高系统的实时性,使系统状态能够在固定时间内收敛,克服了非线性模型预测控制实时性较差的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于固定时间稳定理论的移动机器人nmpc方法,包括如下步骤:
6.s1、建立两轮差分驱动的移动机器人的运动学模型;
7.s2、引入哈密顿量并对连续系统进行离散化处理,得到最优性的离散必要条件f(u,x,t);
8.s3、基于固定时间稳定理论设计控制器对轮式移动机器人进行控制,实现轮式移动机器人的点镇定,其中,采用固定时间收敛率对f(u,x,t)进行求解。
9.优选的,在步骤s1中,运动学模型为:其中,x∈r和y∈r为移动机器人的位置,θ为机器人运动方向与x正方向的夹角,v和ω为移动机器人的线速度与角速度,状态量的矩阵形式为[x y θ]
t
,控制量的矩阵形式为[v ω]
t
。
[0010]
优选的,移动机器人的运动学模型设定约束信息:
[0011]
优选的,在步骤s2中,建立非线性模型,其状态方程及等式约束为:
[0012][0013]
c(x(t),u(t))=0;
[0014]
其中,x(t)∈rn为状态向量,u(t)∈rm为控制输入向量;
[0015]
将非线性模型预测控制问题可以被描述为最优控制问题,最优控制问题的目标函数为:
[0016][0017][0018]
其中,为终端约束,l(
·
)为损失函数,x
*
(κ,t)为从κ=0时刻开始的x(t)的轨迹,最优控制输入为每个t时域的最优控制问题的解;
[0019][0020][0021]
其中,p和q为权重矩阵,xf为期望状态。
[0022]
优选的,引用哈密顿量表示被积函数:
[0023]
h(x,u,σ,λ)=l(x,u) σ
t
f(x,u) λ
t
c(x,u);
[0024]
其中,σ∈rn和λ∈rm为共态变量和拉格朗日乘数。
[0025]
优选的,在步骤s2中,进行离散化处理:将预测时域划分为n步,其最优化的离散后的必要条件为:
[0026][0027][0028]
定义为输入向量序列与lagrange乘数序列构成的向量:
[0029][0030]
则最优性的必要条件为:
[0031][0032]
优选的,在步骤s3中,固定时间收敛率为:
[0033][0034]
其中,对且a>0,定义「f」a=|f|asign(f);α1>0,α2>0,>0,若β∈(0,1),则0<β1<1<β2;
[0035]
若fu为非奇异,则有:
[0036]
初始化u(0)求解方程为:通过u(0)迭代求解出u。
[0037]
优选的,采用前向差分近似法与连续/广义最小残差法对u进行计算,具体为:
[0038]
a、运用雅可比矩阵与向量乘积进行前向差分近似,给出雅可比矩阵与o∈r
mn
、o∈r
nn
、o∈r的乘积:
[0039]
b、
[0040]
其中,h为前向差分步长,则:
[0041][0042]
c、运用连续/广义最小残差法算法对u进行计算。
[0043]
与现有技术相比,本发明的有益效果:本发明运用非线性模型预测控制方法对轮式移动机器人进行点镇定控制,并采用固定时间稳定理论,提供更好的闭环性能和干扰抑制性能,进一步提高系统的实时性,使系统状态能够在固定时间内收敛,克服了非线性模型预测控制实时性较差的问题,本发明方法能够更好的实现轮式移动机器人的点镇定,同时也能更好的运用在实际的工业当中。
附图说明
[0044]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
[0045]
在附图中:
[0046]
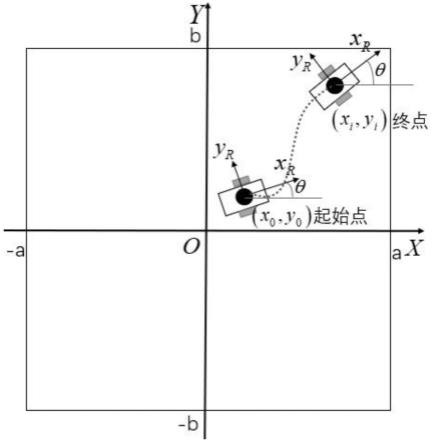
图1是本发明轮式移动机器人参考系描述示意图;
[0047]
图2是本发明轮式移动机器人的运动曲线示意图;
[0048]
图3是本发明轮式移动机器人的线速度变化曲线图;
[0049]
图4是本发明轮式移动机器人的角速度变化曲线图。
具体实施方式
[0050]
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
[0051]
实施例:如图1所示,一种基于固定时间稳定理论的移动机器人nmpc(非线性模型预测控制)方法,包括如下步骤:
[0052]
s1、建立两轮差分驱动的移动机器人的运动学模型;
[0053]
运动学模型为:其中,x∈r和y∈r为移动机器人的位置,θ为机器人运动方向与x正方向的夹角,v和ω为移动机器人的线速度与角速度,状态量的矩阵形式为[x y θ]
t
,控制量的矩阵形式为[v ω]
t
。
[0054]
将轮式移动机器人的运动学模型进行离散化:
[0055][0056]
其中,δt为采样时间。
[0057]
移动机器人的运动学模型设定约束信息:
[0058]
s2、引入哈密顿量并对连续系统进行离散化处理,得到最优性的离散必要条件f(u,x,t);
[0059]
建立非线性模型,其状态方程及等式约束为:
[0060][0061]
c(x(t),u(t))=0;
[0062]
其中,x(t)∈rn为状态向量,u(t)∈rm为控制输入向量;
[0063]
将非线性模型预测控制问题可以被描述为最优控制问题,最优控制问题的目标函数为:
[0064]
[0065][0066]
其中,为终端约束,l(
·
)为损失函数,x
*
(κ,t)为从κ=0时刻开始的x(t)的轨迹,最优控制输入为每个t时域的最优控制问题的解;
[0067][0068][0069]
其中,p和q为权重矩阵,xf为期望状态;
[0070]
为解决最优控制问题,引用哈密顿量表示被积函数:
[0071]
h(x,u,σ,λ)=l(x,u) σ
t
f(x,u) λ
t
c(x,u);
[0072]
其中,σ∈rn和λ∈rm为共态变量和拉格朗日乘数;
[0073]
为实现计算机控制,将控制输入用有限参数表示,需要将系统进行离散化处理,将预测时域划分为n步,其最优化的离散后的必要条件为:
[0074][0075][0076]
定义为输入向量序列与lagrange乘数序列构成的向量:
[0077][0078]
则最优性的必要条件为:
[0079][0080]
s3、基于固定时间稳定理论设计控制器对轮式移动机器人进行控制,实现轮式移动机器人的点镇定,其中,采用固定时间收敛率对f(u,x,t)进行求解。
[0081]
其中,固定时间收敛可以提供更好的闭环性能和干扰抑制性能,可以加快收敛速度,固定时间收敛率为:
[0082]
[0083]
其中,对且a>0,定义「f」a=|f|asign(f);α1>0,α2>0,>0,若β∈(0,1),则0<β1<1<β2;
[0084]
若fu为非奇异,则有:
[0085]
初始化u(0)求解方程为:通过u(0)迭代求解出u。
[0086]
为减小计算成本,将采用前向差分近似法与连续/广义最小残差法(c/gmres)算法对u进行计算,具体为:
[0087]
a、运用雅可比矩阵与向量乘积进行前向差分近似,给出雅可比矩阵与o∈r
mn
、o∈r
nn
、o∈r的乘积:
[0088]
b、
[0089]
其中,h为前向差分步长,则:
[0090][0091]
c、运用连续/广义最小残差法算法对u进行计算。
[0092]
在一仿真试验中,基本参数为:
[0093]
(1)
[0094]
(2)权重矩阵:p=diag{0.1 0.1 0.01}、q=diag{1 5 0.1}、r=diag{0.5 0.05};
[0095]
(3)初始位姿为:x0=[0 0 0]
t
,终值位姿为:xf=[1.5 1.5 0]
t
;
[0096]
(4)参数的取值分别为α1=30、α2=20、β=0.6,则β1=3/7、β2=11/7。对于仿真中的时间参数,设置仿真总时长t_end=20,控制周期dt=0.001,前向差分步长h=0.002,预测步长n=10,预测时域长度tf=1,迭代上限k
max
=10;
[0097]
将上述参数在matlab2016a环境中进行数值仿真,获得:轮式移动机器人的运动曲线示意图如图2所示,轮式移动机器人的线速度变化曲线如图3所示,轮式移动机器人的角速度变化曲线如图4所示,由仿真结果得出本文所提方法具有很好的实时性,验证了本文所提方法的有效性。
[0098]
最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。