技术特征:
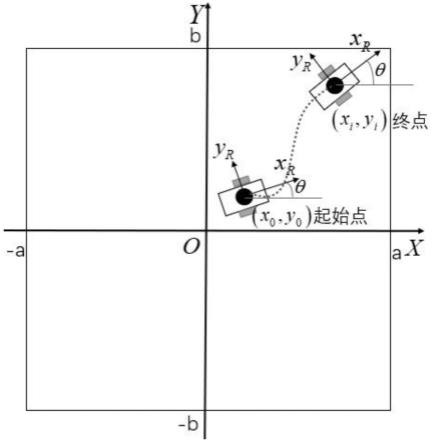
1.一种基于固定时间稳定理论的移动机器人nmpc方法,其特征在于:包括如下步骤:s1、建立两轮差分驱动的移动机器人的运动学模型;s2、引入哈密顿量并对连续系统进行离散化处理,得到最优性的离散必要条件f(u,x,t);s3、基于固定时间稳定理论设计控制器对轮式移动机器人进行控制,实现轮式移动机器人的点镇定,其中,采用固定时间收敛率对f(u,x,t)进行求解。2.根据权利要求1所述的一种基于固定时间稳定理论的移动机器人nmpc方法,其特征在于:在步骤s1中,运动学模型为:其中,x∈r和y∈r为移动机器人的位置,θ为机器人运动方向与x正方向的夹角,v和ω为移动机器人的线速度与角速度,状态量的矩阵形式为[x y θ]
t
,控制量的矩阵形式为[v ω]
t
。3.根据权利要求2所述的一种基于固定时间稳定理论的移动机器人nmpc方法,其特征在于:移动机器人的运动学模型设定约束信息:4.根据权利要求1所述的一种基于固定时间稳定理论的移动机器人nmpc方法,其特征在于:在步骤s2中,建立非线性模型,其状态方程及等式约束为:c(x(t),u(t))=0;其中,x(t)∈r
n
为状态向量,u(t)∈r
m
为控制输入向量;将非线性模型预测控制问题可以被描述为最优控制问题,最优控制问题的目标函数为:min:n:其中,为终端约束,l(
·
)为损失函数,x
*
(κ,t)为从κ=0时刻开始的x(t)的轨迹,最优控制输入为每个t时域的最优控制问题的解;优控制输入为每个t时域的最优控制问题的解;其中,p和q为权重矩阵,x
f
为期望状态。
5.根据权利要求4所述的一种基于固定时间稳定理论的移动机器人nmpc方法,其特征在于:引用哈密顿量表示被积函数:h(x,u,σ,λ)=l(x,u) σ
t
f(x,u) λ
t
c(x,u);其中,σ∈r
n
和λ∈r
m
为共态变量和拉格朗日乘数。6.根据权利要求5所述的一种基于固定时间稳定理论的移动机器人nmpc方法,其特征在于:在步骤s2中,进行离散化处理:将预测时域划分为n步,其最优化的离散后的必要条件为:为:定义为输入向量序列与lagrange乘数序列构成的向量:则最优性的必要条件为:7.根据权利要求1所述的一种基于固定时间稳定理论的移动机器人nmpc方法,其特征在于:在步骤s3中,固定时间收敛率为:其中,对且a>0,定义α1>0,α2>0,>0,若β∈(0,1),则0<β1<1<β2;若f
u
为非奇异,则有:初始化u(0)求解方程为:通过u(0)迭代求解出u。8.根据权利要求7所述的一种基于固定时间稳定理论的移动机器人nmpc方法,其特征在于:采用前向差分近似法与连续/广义最小残差法对u进行计算,具体为:a、运用雅可比矩阵与向量乘积进行前向差分近似,给出雅可比矩阵与o∈r
mn
、o∈r
nn
、o∈r的乘积:
b、其中,h为前向差分步长,则:c、运用连续/广义最小残差法算法对u进行计算。
技术总结
本发明公开了一种基于固定时间稳定理论的移动机器人NMPC方法,包括如下步骤:建立两轮差分驱动的移动机器人的运动学模型;将非线性模型预测控制问题描述为最优控制问题,引入哈密顿量并对连续系统进行离散化处理,得到最优性的离散必要条件,并获得优化问题;采用固定时间收敛率对优化问题的解进行迭代,并将所得解作为连续广义最小残差法的初始解,对轮式移动机器人进行控制,实现轮式移动机器人的点镇定,提供更好的闭环性能和干扰抑制性能,提高系统的实时性,使系统状态能够在固定时间内收敛,克服了非线性模型预测控制实时性较差的问题。问题。问题。
技术研发人员:陆群 刘甜田 赵伟 夏菽兰 殷宇翔 蒋成晨 翁嘉鑫
受保护的技术使用者:盐城工学院
技术研发日:2022.05.05
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。