1.本发明属于机械手技术领域,尤其涉及一种抓取力自平衡适应的番茄采摘机械手。
背景技术:
2.番茄因为富含丰富的营养,并具有抑制细菌、助消化、降低胆固醇等多种功用被称为神奇的菜中之果,深受人们的喜爱。
3.传统技术上,番茄的采摘大多数是采用人工,不仅需要大量的采摘人员,而且费时费力,工作效率低,采摘成本高;虽然近年来市场上也出现一些采摘番茄的机械,但是由于现有技术中,机械采摘通常为多指式采摘,往往会因为多指之间抓取力或夹持力的不平衡造成果实压伤或者掉落,从而影响到番茄的采摘效率和采摘质量。
技术实现要素:
4.本发明的目的是提供一种抓取力自平衡适应的番茄采摘机械手,可减少采摘过程中由于机械手多指之间夹持力不均衡造成的果实损伤脱落。
5.为了实现上述目的,本发明所采用的技术方案是:一种抓取力自平衡适应的番茄采摘机械手,其特征在于:包括抓手组件、支撑组件、用于驱动抓手组件动作的动力组件以及协助抓手组件用于调整番茄位置的自平衡托举组件;所述的抓手组件包括两个夹爪、两根连接杆和一个固定座,每个夹爪均包括一个连接臂和一个设置在连接臂一端的夹爪本体;连接臂的一端通过各自的连接杆与固定座相铰接;所述的支撑组件包括两根水平设置的固定杆、一个电机安装座和一个机械臂连接底座,两根固定杆的一端分别与两个连接臂的另一端对应铰接,两根固定杆的另一端穿过固定座后与机械臂连接底座固定连接,电机安装座设置在两根固定杆之间靠近两个连接臂的一端;所述的自平衡托举组件设置在抓手组件的下方,包括一个托举夹爪,托举夹爪包括一个连接柄和设置在连接柄一端的托举环,托举夹爪通过连接柄与一根调整连接杆相铰接,调整连接杆的一端与连接柄铰接后穿过电机安装座,另一端通过一根竖直旋转轴与固定座铰接,在电机安装座上设置有用于驱动调整连接杆绕着着竖直旋转轴旋转以调整托举夹爪位置的调整驱动电机,调整驱动电机输出轴上的主动锥齿轮与设置在调整连接杆上的从动锥齿轮段相啮合;与调整连接杆固定连接设置有一个支架,支架上设置有用于驱动托举夹爪相对调整连接杆上下转动的电动推杆,电动推杆的两端分别与支架和连接柄相铰接,在托举环上设置有一个用于检测番茄重心位置的陀螺仪,陀螺仪将检测的信号传输给控制器,控制器控制调整驱动电机动作通过调整托举夹爪与水平x轴在水平平面内夹角,使得托举环的中心线与番茄的重心线重合,实现对推举夹手的位置调整。
6.进一步地,所述的动力组件包括固定设置在电机安装座上的步进电机,步进电机
的动力输出端与一根丝杠的一端固定连接,丝杠的另一端穿过固定座之后可转动支撑安装在机械臂连接底座上,所述的固定座与安装在丝杠上的丝母固定连接。
7.进一步地,在机械臂连接底座上设置有贯穿孔,贯穿孔中安装有轴承,所述丝杠的相应端安装在轴承内孔中。
8.进一步地,在固定座上设置有用于供丝杠穿过的丝杠孔,丝母的一端与固定座4固定连接。
9.进一步地,所述的夹爪本体与连接臂中连接固定杆的一端相连接,夹爪本体呈弧形,两个夹爪本体相对设置。
10.进一步地,所述夹爪和托举夹爪均采用软橡胶材料制作而成。
11.进一步地,在电机安装座下部设置有供调整连接杆穿过并能有活动的沿水平方向延伸的长方形槽口。
12.进一步地,所述的固定座、电机安装座和机械臂连接底座分别为一块圆形板。
13.有益效果:1、根据本发明,在具有两个夹爪的抓手组件的基础上,设计增加了自平衡托举组件,通过在托举夹爪上配备陀螺仪,使得托举夹爪具备调心功能,能够自主寻找番茄重心并调整托举夹爪使得托举环的中心线与番茄重心线重合,具有灵活的应变能力,可有效减少夹爪手指对番茄表皮的夹持力,并使各手指夹持力均匀可调,提高抓取成功率、减少破损率。
14.2、本发明技术方案抓手组件的动力采用丝杠传动,使运动连接部分更为简单,且不易损伤番茄枝叶。
15.3、本发明优选技术方案中,夹爪和托举夹爪均采用软橡胶材料制作而成,夹爪本体采用弧形,更容易与番茄实现贴合,比起常见的用金属材料制成的刚性机械手,更容易实现抓取且不会造成对番茄的损坏。
16.4、本发明采用两个夹爪(主手指)和一个托举夹爪(辅助手指),相比其他采摘机械手采用三个以上手指的结构,能够节省机械手的制作成本。
附图说明
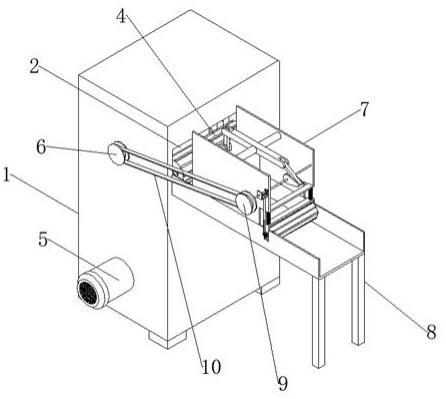
17.图1为本发明的结构示意图。
18.图2为图1俯视图(图中有省略)。
19.图3为图1中a处放大图。
20.图中,1、夹爪,101、连接臂,102、夹爪本体,2、固定杆,3、连接杆,4、固定座,5、机械臂连接底座,6、丝杠,7、步进电机,8、电机安装座,9、托举环,10、铰接轴,11、调整连接杆,12、从动锥齿轮段,13、主动锥齿轮,14、调整驱动电机,15、支架,16、电动推杆,17、连接柄,18、陀螺仪,19、长方形槽口,20、丝母。
具体实施方式
21.下面结合附图和实施例对本发明作进一步的详细说明。
22.如图所示,一种抓取力自平衡适应的番茄采摘机械手,包括抓手组件、支撑组件、用于驱动抓手组件动作的动力组件以及协助抓手组件用于调整番茄位置的自平衡托举组
件。
23.本实施例中,抓手组件包括两个夹爪1、两根连接杆3和一个固定座4,每个夹爪均包括一个连接臂101和一个设置在连接臂101一端的夹爪本体102;连接臂102的一端通过各自的连接杆3与固定座4相铰接。
24.具体地,连接杆3与固定座通过铰接轴10进行铰接。具体铰接方式为现有技术,本处不再赘述。
25.本实施例中,所述的夹爪本体102与连接臂101中连接固定杆2的一端相连接,夹爪本体102呈弧形,具体地,两个夹爪本体102的内周可设计为圆柱面,从而两个夹爪本体102相对设置后形成圆柱筒状的合抱之势。
26.所述支撑组件包括两根水平间隔设置的固定杆2、一个电机安装座8和一个机械臂连接底座5。两根固定杆2的一端分别与两个连接臂101的另一端对应铰接,两根固定杆2的另一端穿过固定座4后与机械臂连接底座5固定连接,电机安装座8设置在两根固定杆2之间靠近两个连接臂101的一端。
27.所述的动力组件包括固定设置在电机安装座8上的步进电机7,步进电机7的动力输出端与一根丝杠6的一端固定连接,丝杠6的另一端穿过固定座4之后可转动支撑安装在机械臂连接底座5上,所述的固定座4与安装在丝杠上的丝母20固定连接。
28.为了避免丝杠6磨损,在机械臂连接底座5上设置有贯穿孔,贯穿孔中安装有轴承,所述丝杠6的相应端安装在轴承内孔中。
29.在固定座4上设置有用于供丝杠6穿过的丝杠孔。本实施例中,丝母20的一端与固定座4固定连接,在这种实施方式中,可以将丝母20的端部与固定座4的一侧焊接连接在一起。
30.作为另外一种实施方式,也可以将丝母的外周与设置在固定座4上的丝杠孔配合安装后,将丝母的两端与固定座两侧分别焊接连接。
31.自平衡托举组件设置在抓手组件的下方,包括一个托举夹爪,托举夹爪包括一个连接柄17和设置在连接柄一端的托举环9,托举夹爪通过连接柄与一根调整连接杆11相铰接,调整连接杆11的一端与连接柄17铰接后穿过电机安装座8,另一端通过一根竖直旋转轴与固定座4铰接,在电机安装座8上设置有用于驱动调整连接杆11绕着着竖直旋转轴旋转以调整托举夹爪位置的调整驱动电机14,调整驱动电机14输出轴上的主动锥齿轮13与设置在调整连接杆11上的从动锥齿轮段12相啮合;与调整连接杆11固定连接设置有一个支架15,支架15上设置有用于驱动托举夹爪相对调整连接杆上下转动的电动推杆16,电动推杆16的两端分别与支架15和连接柄相铰接,在托举环9上设置有一个用于检测番茄重心位置的陀螺仪18,陀螺仪将检测的信号传输给控制器,控制器控制步进电机7或/和电动推杆16动作通过调整托举夹爪与水平x轴在水平平面内夹角实使得托举环的中心线与番茄的重心线重合。
32.为了保护番茄不受损伤,所述夹爪1和托举夹爪均采用软橡胶材料制作而成。
33.在电机安装座8下部设置有供调整连接杆11穿过并能有活动的沿水平方向延伸的长方形槽口19,从而保证调整连接杆11在围绕设置在机械臂连接底座5上的竖直旋转轴转动时,具有足够的活动范围。
34.本实施例中,所述的固定座4、电机安装座8和机械臂连接底座5分别为一块圆形
板。
35.本发明一种抓取力自平衡适应的番茄采摘机械手具体使用方法为:先将本发明通过机械臂连接底座5机械臂连接底座5连接在机械臂(图略)上,机械臂可安装在采摘车上。机械臂将本发明送至番茄果实附近,控制器控制步进电机7动作,步进电机7驱动丝杠6转动,丝杠6转动过程中驱动与其螺纹配合安装的丝母20沿着丝杠6左右移动,由于丝母20与固定座4固定连接,因而固定座4随着丝母20向左或者向右移动:固定座4向左移动时,两个夹爪1相互张开可松开果实,固定座4向右移动时,两个夹爪1可靠近抓取果实。
36.托举环9上设置的陀螺仪18( 设置在托举环下侧)会自动检测确定番茄的重心线(重心番茄重心所在的竖直线)位置,然后将检测的信号传输给控制器,控制器控制调整驱动电机14动作,驱动主动齿轮13通过从动锥齿轮段12带动调整连接杆11绕着设置在固定座4上的竖直旋转轴转动,直至托举环9的托举中心线运动到番茄的重心线上,即两者相重合;然后电动推杆16动作驱动托举夹爪(包括托举环9和连接柄17)托举,同时步进电机7带动丝杠6转动,由丝母20带动固定座4向右运动,驱使两个夹爪1的夹爪本体102相互靠近夹紧果实,同时配合机械臂的收缩动作模拟人工采摘过程,使果实与果柄分离,调整机械臂将果实放置在相应的位置(比如自带的采摘框),完成整个采摘过程。
37.需要说明的是,本文所述上下左右均与图1本身的上下左右相一致。
38.以上实施例仅用以说明本发明的技术方案而非对其进行限制,所属领域的普通技术人员应当理解,参照上述实施例可以对本发明的具体实施方式进行修改或者等同替换,这些未脱离本发明精神和范围的任何修改或者等同替换均在本发明的权利要求保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。