技术特征:
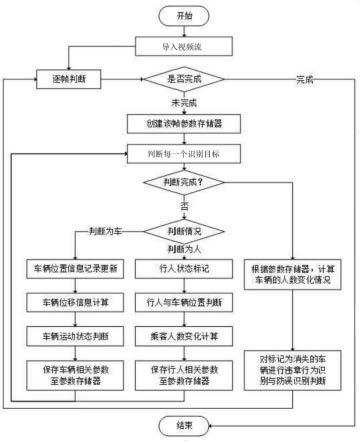
1.一种基于深度学习的机场出发层违章车辆自动识别方法,其特征在于:包括以下步骤:s1:获取视频流,导入目标识别模型和多目标追踪判断模型,对视频流进行逐帧判断;s2:目标识别与判断,将车辆和行人作为识别目标,并分别赋予id,如判断为车则执行步骤s3,如判断为人则执行步骤s4,直至视频文件每一帧均被判断完成;s3:对车辆是否处于静止状态进行识别,并保存车辆识别参数数据集至参数存储器;s4:对行人是否消失进行识别,并保存行人识别参数数据集至参数存储器;s5:对s3、s4中保存到参数存储器中的数据集进行计算,以一辆静止的车的检测范围内记录行人“出现”与“消失”的总次数的代数差来计算车辆的最终人数变化;s6:以车辆的车内最终人数变化为依据,对标记为消失的车辆进行违章行为识别;当人数变化>0时,可以判断车辆存在接客行为,即违章;当人数变化<0时,可以判断车辆存在送客行为,即未违章;当人数变化=0时,可以判断车辆为路过车辆;当人数变化数据丢失时,则代表车辆丢失部分数据,将其人数变化记为0,同时将该车做上数据丢失的标记;s7:输出结果。2.如权利要求1所述的基于深度学习的机场出发层违章车辆自动识别方法,其特征在于:所述s1中的视频流为时长为t的机场出发层车道边固定机位监控视频,用t表示监控视频的任一时刻,t∈[0,t];所述s2、s3、s5、s6的具体步骤为:车辆在t时刻被目标识别模型识别到并判断为“出现”时被赋予id为i,i∈n,n代表视频中所有个体被跟踪算法赋予的id集合;用表示t时刻时被多目标追踪判断模型的跟踪器标记“出现”的车的id的集合,用表示t时刻时被标记“消失”的车的id的集合,用表示t时刻时未被多目标追踪判断模型的跟踪器标记为“消失”的车的id的集合,由式1确定:车辆是否属于静止状态使用参数代表id为i的车辆在t时刻的状态修正系数判定,当其为1时表示车辆处于静止状态,可以进行违章识别,当其为0时,表示车辆处于其他状态,不能进行违章识别,由式2确定:式2中,代表id为i的车辆在t时刻的状态参数,其为2时表示车辆处于还未识别出运动与静止的未知状态,其为1时表示车辆处于静止状态,其为0时表示车辆处于运动状态,其为-1时表示车辆处于部分监测数据丢失状态,仅有当为1时才能对车辆i进行违章识别。3.如权利要求2所述的基于深度学习的机场出发层违章车辆自动识别方法,其特征在于:所述s2、s4、s5、s6的具体步骤为:当行人在t时刻被目标识别模型识别到并判断为“出现”时被赋予id为j,j∈n,用表示t时刻时被跟多目标追踪判断模型的跟踪器标记“出现”的人的id的集合,用表示t时刻时被标记“消失”的人的id的集合,用表示t时刻时未被
多目标追踪判断模型的跟踪器标记“消失”的人的id的集合,由式8确定:在监控视频的时间范围内,车辆i是否违章可由其在屏幕消失时的车内人数确定,使用参数c
nei
表示id为i的车在屏幕消失时的车内人数,代表t时刻id为i的车辆内人数,c
nei
可由式9确定:当时,即id为i的车辆不存在丢失数据的情况时,可分为三种情况,当c
nei
>0时,判断id为i的车辆存在接客行为,即违章;当c
nei
<0时,判断id为i的车辆存在送客行为,即未违章;当c
nei
=0时,判断id为i的车辆为路过车辆;当时,则代表id为i的车辆丢失部分数据数据,将在屏幕消失时的车辆的车内人数变化记为0,同时将id为i的车做上数据丢失的标记。4.如权利要求2所述的基于深度学习的机场出发层违章车辆自动识别方法,其特征在于:所述由式3确定:式3中,δc
l
代表位移阈值,代表t时刻id为i的车辆最新连续三次位移记录集合,代表t时刻id为i的车辆最新连续三次位移记录集合中第w个位移;为位移记录次数,由式4确定:式4中,ε为位移记录更新间隔,k
i
代表距离车辆i被标记为“出现”的时刻最近的位移记录更新时刻,k
i
由式5确定:式3中,由连续三次位移记录集合位移阈值δc
l
、前一时刻运动状态以及当前时刻t决定;式3中的位移集合是通过提取车辆位置记录中最新的4个位置数据,并计算其相邻两个位置记录的差值得到的,总共包含3个差值,即三个位移幅度,由式6确定:
代表在t时刻id为i的车辆的中心点的纵坐标,由式7确定:5.如权利要求3所述的基于深度学习的机场出发层违章车辆自动识别方法,其特征在于:所述由式10确定,即:式10中,表示id为i的车辆在t时刻车辆检测数据完整性系数,其为1时表示数据完整可以进行正确检测,其为0时表示车辆由于遮挡而造成数据不完整无法进行正确检测,由式11确定:式11中表示id为i的车辆在t时刻的车内人数变化,由式12确定,即:式12中,表示id为j的人在t时刻的状态系数,该人被判断为“消失”为1,该人被判断为“出现”为-1,否则为0,由式13确定:式12中,为t时刻i车与j人位置关系系数,当在t时刻id为j的人的中心点位置在id为i的车的检测范围内时为1,否则为0,由式14确定;同时,行人在t时刻的中心点坐标以及车辆在t时刻的中心点坐标以及检测范围的横纵坐标的最大值和最小值由多目标追踪判断模型计算返回,为id为i的车在t时刻检测范围横坐标最小值,为id为i的车在t时刻检测范围横坐标最大值,为id为i的车在t时刻检测范围纵坐标最小值,为id为i的车在t时刻追踪器的检测范围纵坐标最大值,为id为j的人在t时刻中心点横坐标,为id为j的人在t时刻中心点纵坐标;
6.如权利要求1-5任一项所述的基于深度学习的机场出发层违章车辆自动识别方法,其特征在于:所述目标识别模型为yolo_v4算法模型;所述多目标追踪判断模型为deepsort算法模型。
技术总结
本发明公开一种基于深度学习的机场出发层违章接客车辆识别方法:基于机场出发车道边实际固定机位的监控视频,使用YOLO_v4算法识别车辆与行人目标,利用DeepSORT算法跟踪目标,根据YOLO_v4返回的目标类别与DeepSORT记录的目标位置信息判断车辆的运行状态与乘客上下车行为,在车辆停止时统计车内人数变化情况,根据该统计结果判断车辆是否存在接客行为,完成对机场出发层违章车辆的识别。有益效果:准确度可以达到83.3%,检测速度相较传统人工识别方式提升巨大,可以大大减小监控执法人员的工作量,提高非现场执法的执法效率及执法准确性,在智能交通监管领域具有广阔的发展前景,可以使机场陆侧交通的安全管理得到进一步强化,为交通行业的长足发展提供有效保障。为交通行业的长足发展提供有效保障。为交通行业的长足发展提供有效保障。
技术研发人员:柏强 邵宇麒 蒙思源 王宇轩 秦倩 杜茂维 黄明
受保护的技术使用者:首都机场集团有限公司
技术研发日:2021.12.29
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。