1.本发明属于机器视觉技术领域,具体涉及一种基于纹理熵值的风机叶片辨识方法及系统。
背景技术:
2.在风力发电机(简称风机)日常运行维护过程中,由于风电机组分布较为分散,相互之间距离较长,分布区域广,人工巡检难度大,效率低,并且有一定危险性,且对于线长点多范围大的巡检场景来说,采用人工方式成本也较高,因此为了保持风电机组巡检过程的高效快捷,需要采用自动化巡检设备,包括但不限于无人机摄像等方式对风机机组特别是叶片的情况进行获取,并通过自动化的图像处理方法检测叶片是否存在裂纹等故障缺陷。
3.采用自动化的图像处理方式来进行风机叶片的故障检测虽然具有高效安全等优点,然而在故障检测过程中,需要从不同角度对风机叶片进行拍摄,在拍摄过程中难以自动识别每个叶片,可能会造成不同叶片的重复检测或漏检等情况,另外当风机在不停机状态下进行巡检时,不同时刻拍摄的图像中的叶片位置可能发生变化,这时即使是发现了叶片上的问题也无法确定到底是哪个叶片出现的问题,给风机叶片的缺陷分析和发现带来不便。
技术实现要素:
4.为了解决上述现有技术中存在的缺陷,本发明的目的在于提供一种基于纹理熵值的风机叶片辨识方法及系统,能够在风机不停机的情况下准确识别叶片,以便进行后续可能的叶片故障和缺陷的定位。
5.本发明是通过以下技术方案来实现:
6.一种基于纹理熵值的风机叶片辨识方法,包括:
7.s1:获取叶片的初始图像信息;
8.s2:通过图像处理计算每个叶片的纹理熵值,记录纹理熵值在叶片的分布情况;
9.s3:根据图像采集时刻近时间段内的气象信息或历史经验数据估算一个纹理熵值单位时间内可能的变化阈值;
10.s4:将新采集图像中待识别目标的纹理熵值与初始图像的纹理熵值叠加变化阈值进行对比,根据对比结果识别新采集图像中的叶片身份。
11.优选地,s1中,获取的风机叶片初始图像信息包含各个叶片的完整纹理信息。
12.优选地,s1中,初始图像信息可以通过整体采集或拼接采集,采集的图像信息包含从叶尖到叶根的完整区域。
13.优选地,s2具体为:根据图像信息特点,采用图像边缘特征提取算法获取各叶片轮廓,获得各叶片轮廓内的叶片纹理熵值特征,标记各叶片的整体区域或细分区域的纹理熵,用于后续与需要识别的目标图像的对应区域进行对比。
14.进一步优选地,图像边缘特征提取算法采用基于canny算子的图像边缘特征提取
算法。
15.进一步优选地,基于canny算子的图像边缘特征提取算法包括以下步骤:1)对于获取的叶片初始图像信息使用高斯滤波器进行降噪;2)计算图像中每个像素点的梯度强度和方向;3)应用非极大值抑制方法消除杂散效应;4)应用双阈值检测来确定真实的和潜在的边缘;5)通过抑制孤立的弱边缘最终完成边缘检测。
16.进一步优选地,各叶片轮廓内的叶片纹理熵值特征通过图像灰度共生矩阵法获得。
17.优选地,s3中,估算方法包括直接等同上一时刻该风机叶片纹理熵值变化梯度、等同同时期该风机其它叶片的纹理熵值变化梯度均值、基于机器学习或深度学习算法结合气象预报条件对变化阈值的预测分析。
18.本发明公开的一种基于纹理熵值的风机叶片辨识系统,包括:
19.叶片初始图像信息获取模块,获取叶片的初始图像信息;
20.叶片纹理熵值计算及存储模块,通过图像处理计算每个叶片的纹理熵值,记录纹理熵值在叶片的分布情况;
21.变化阈值估算模块,根据图像采集时刻近时间段内的气象信息或历史经验数据估算一个纹理熵值单位时间内可能的变化阈值;
22.叶片辨识模块,将新采集图像中待识别目标的纹理熵值与初始图像的纹理熵值叠加变化阈值进行对比,根据对比结果识别新采集图像中的叶片身份。
23.与现有技术相比,本发明具有以下有益的技术效果:
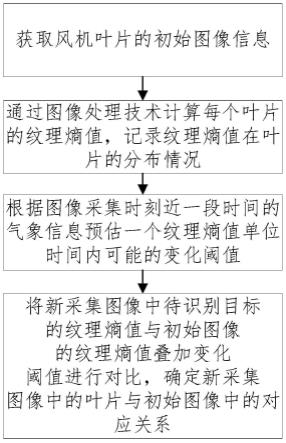
24.本发明公开的基于纹理熵值的风机叶片辨识方法,首先获取风机叶片的初始图像信息,通过图像处理技术计算每个叶片的纹理熵值,记录纹理熵值在叶片的分布情况,根据待识别图像采集时刻近一段时间的气象信息预估一个纹理熵值单位时间内的变化阈值,将新采集图像中的待识别目标的纹理熵值与初始图像中的对应区域的纹理熵值叠加变化阈值进行对比识别。本发明能够自动识别风机叶片,以便之后进行风机叶片故障和缺陷的快速定位,保证后期维护工作的快速开展;同时能够在不需要风机停机的情况下进行风机叶片的自动识别,减少了风电机组的停机巡检时间,提高风电机组的自动化巡检效率,提高风电机组的发电时间和发电效率,具有良好的应用前景。
附图说明
25.图1为本发明的方法流程图;
26.图2为实施例中进行叶片轮廓提取的方法流程图。
具体实施方式
27.下面结合附图和实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
28.如图1,本发明的基于纹理熵值的风机叶片辨识方法,包括:
29.s1:获取叶片的初始图像信息。获取的风机叶片初始图像信息包含各个叶片的完整纹理信息。初始图像信息可以通过整体采集或拼接采集,采集的图像信息包含从叶尖到叶根的完整区域。
30.s2:通过图像处理计算每个叶片的纹理熵值,记录纹理熵值在叶片的分布情况。具体为:根据图像信息特点,采用图像边缘特征提取算法获取各叶片轮廓,获得各叶片轮廓内的叶片纹理熵值特征,标记各叶片的整体区域或细分区域的纹理熵,用于后续与需要识别的目标图像的对应区域进行对比。图像边缘特征提取算法可以采用基于canny算子的图像边缘特征提取算法,具体包括以下步骤:1)对于获取的叶片初始图像信息使用高斯滤波器进行降噪;2)计算图像中每个像素点的梯度强度和方向;3)应用非极大值抑制方法消除杂散效应;4)应用双阈值检测来确定真实的和潜在的边缘;5)通过抑制孤立的弱边缘最终完成边缘检测。各叶片轮廓内的叶片纹理熵值特征通过图像灰度共生矩阵法获得
31.s3:根据图像采集时刻近时间段内的气象信息或历史经验数据估算一个纹理熵值单位时间内可能的变化阈值。估算方法包括直接等同上一时刻该风机叶片纹理熵值变化梯度、等同同时期该风机其它叶片的纹理熵值变化梯度均值、基于机器学习或深度学习算法结合气象预报条件对变化阈值的预测分析。
32.s4:将新采集图像中待识别目标的纹理熵值与初始图像的纹理熵值叠加变化阈值进行对比,根据对比结果识别新采集图像中的叶片身份。
33.本发明还公开了一种基于纹理熵值的风机叶片辨识系统,包括:
34.叶片初始图像信息获取模块,获取叶片的初始图像信息;
35.叶片纹理熵值计算及存储模块,通过图像处理计算每个叶片的纹理熵值,记录纹理熵值在叶片的分布情况;
36.变化阈值估算模块,根据图像采集时刻近时间段内的气象信息或历史经验数据估算一个纹理熵值单位时间内可能的变化阈值;
37.叶片辨识模块,将新采集图像中待识别目标的纹理熵值与初始图像的纹理熵值叠加变化阈值进行对比,根据对比结果识别新采集图像中的叶片身份。
38.下面以一个具体实施例来对本发明进行进一步地解释说明:
39.采用本发明的基于纹理熵值的风机叶片辨识方法,对某风电场的风机叶片进行辨识,包括以下步骤:
40.第一,获取风机叶片的初始图像信息p1。所获取的叶片初始图像p1应包含各个叶片的较完整的纹理信息,设叶片数量为3,可以通过整体采集或拼接采集,采集的信息从包含从叶尖到叶根的完整区域。
41.第二,计算获取3个叶片的纹理特征的熵值。对于获取的叶片初始图像采用如图2所示的图像处理方式来提取叶片边缘:1)对于获取的叶片初始图像p1信息使用高斯滤波器;2)计算图像中每个像素点的梯度强度和方向;3)应用非极大值抑制;4)应用双阈值检测来确定真实的和潜在的边缘;5)通过抑制孤立的弱边缘最终完成边缘检测。
42.基于灰度共生矩阵提取计算3个叶片轮廓内的纹理特征的熵值:s
10
、s
20
、s
30
,然后标记3个叶片的整体区域d或者细分区域dn的纹理熵。
43.第三,根据风机所在地区当前季节的气候条件和历史经验数据估算确定变化阈值sp。假定去年同时期的风机叶片纹理特征的变化阈值为spp,今年近期的风机叶片纹理特征的变化阈值为spn,可以通过下属方法获得sp=0.8*spp 0.2*spn。
44.第四,采用图2所示的图像处理方法确定新采集图像中的待识别的叶片的区域d,假定时间间隔为t,计算获取待识别叶片区域d的纹理熵sr{d},选择初始图像中的各个叶片
对应区域纹理熵值s
10
{d}、s
20
{d}、s
30
{d}与变化阈值sp叠加为s
10
{d} sp*t、s
20
{d} sp*t、s
30
{d} sp*t,sr{d}与s
10
{d} sp*t、s
20
{d} sp*t、s
30
{d} sp*t三个值分别进行对比,确定满足min[sn0{d} sp*t-sr{d}]的第n个叶片则为识别目标。
[0045]
需要说明的是,以上所述仅为本发明实施方式的一部分,根据本发明所描述的系统所做的等效变化,均包括在本发明的保护范围内。本发明所属技术领域的技术人员可以对所描述的具体实例做类似的方式替代,只要不偏离本发明的结构或者超越本权利要求书所定义的范围,均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。