1.本发明涉及一种猪肉食品加工技术领域,尤其涉及一种电动增力式双低位锤肉机。
背景技术:
2.扁肉、肉燕、鱼丸等速食食品加工中需要将猪肉制成肉泥,如何高效制作高品质肉泥成为相关行业难点。专利201910131944.5和专利201810455261.0等所公布的各类锤肉机,其锤肉的动力源均采用电机。不过现有方案其传动链过长,不仅效率不高,而且锤打过程的冲击力有限。为了提高肉泥更有内部劲道的肉泥效果,如何实现肉泥块锤打的瞬间冲击力成为研发的重点。
技术实现要素:
3.针对目前无法实现叠加型的肉泥锤打冲击力技术现状,发明人提供了一种电动增力式双低位锤肉机,所述电动增力式双低位锤肉机由滚桶模块、电动增力双锤模块、控制系统、机架体和肉泥导向组件组成。
4.所述机架体作为其他组成部件的装配基体。
5.所述滚桶模块由滚桶电机、蜗杆、涡轮、主动带轮、从动带轮、皮带、滚珠、回转座和滚桶组成,所述涡轮与主动带轮固定连接,所述从动带轮与所述回转座固定连接,所述滚桶与回转座固定连接,所述回转座的下端设置有可嵌入所述滚珠的凹槽,所述机架体通过所述滚珠支撑所述回转座,所述滚桶电机直接驱动蜗杆,进而依次经过所述涡轮、主动带轮、皮带、从动带轮、回转座驱动所述滚桶。
6.所述电动增力双锤模块由齿条、带齿轮增力电机、齿条导向座、导向杆组件、升降板、气缸安装座、两个气缸、两套锤头组件和储气罐组成,所述齿条固定安装在所述机架体上,所述齿条背面设置有与所述齿条导向座配合的导轨,所述齿条导向座安装在所述升降板上,并与带齿轮增力电机的壳体固定连接,所述带齿轮增力电机与所述齿条啮合传动,所述带齿轮增力电机用于实现所述升降板的升降运动,所述气缸安装座固定在与所述升降板上,所述气缸固定安装在气缸安装座上,每个所述锤头组件对应固定安装在一个气缸上,所述储气罐用于气缸作业时的高压气体快速补充。
7.所述肉泥导向组件固定安装在所述机架体上,其延伸端处的变高度刮板用于将所述滚桶中的肉泥高度刮低后输送至所述锤头组件下方。
8.所述控制系统由开关组、触摸屏、气控阀组件和plc控制器组成,所述plc控制器根据所述开关组和触摸屏的输入信号,通过所述气控阀组件对所述气缸的工作状态进行控制,所述plc控制器直接对带齿轮增力电机和滚桶电机的工作状态进行控制。
9.所述控制系统通过控制所述电动增力双锤模块实现肉泥锤击过程的电动增力式击打效果。
10.当所述plc控制器控制所述气控阀组使所述两套气缸均通入高压气体时,所述两
套锤头组件均向下锤打肉泥,两套气缸提供两套锤头组件锤击过程的初始击打力。
11.在所述气缸向下伸出过程中,所述plc控制器通过控制所述带齿轮增力电机在所述齿条上向下啮合运动,使所述齿条导向座、升降板、气缸安装座、两套气缸、两套锤头组件一起向下运动,利用大配重为两套锤头组件提供电动增力式锤击效果。
12.所述两套锤头组件采用低位联动控制方案,当所述升降板下降至低位阶段时一起向下锤打或向上收缩。
13.所述开关组包括“启动”或“停机”两种输入信号,所述plc控制器依据这两种输入信号对所述气缸、带齿轮增力电机和滚桶电机的工作状态进行对应的控制。
14.当接收到所述开关组“启动”输入信号时,所述plc控制器分别控制所述滚桶电机进入恒速转动、所述气缸上下同时伸缩运动,并在所述气缸下行时,控制带齿轮增力电机进入电动增力式击打。
15.当接收到所述开关组“停机”控制信号时,所述plc控制器分别控制所述滚桶电机停止工作、每个所述气缸均处于上位置、带齿轮增力电机驱动升降板处于上位置。
16.所述触摸屏与所述plc控制器之间采用双向参数交互,一方面所述plc控制器接收来自所述触摸屏所发送的调试参数输入信号,在工作前对所述气缸的伸缩周期、带齿轮增力电机和滚桶电机的速度进行变更控制,另一方面所述plc控制器将工作中的气缸伸缩周期、带齿轮增力电机和滚桶电机的速度信息传送并显示在所述触摸屏上。
17.区别于无法实现对肉泥块的击打锤肉点自动变更的技术现状,发明人提供了一种电动增力式双低位锤肉机。上述技术方案具有如下优点:所述电动增力式双低位锤肉机具有肉泥块捶打过程实现电动增力式技术特征,一方面通过两套锤头组件的低位气缸驱动提供锤打初始击打力,同时利用电动增力双锤模块的大惯量下降运动,实现对肉泥块的电动增力式叠加冲击力。这种锤打方法有效改善了肉泥的加工品质,并保证了生产效率。
18.上述发明内容相关记载仅是本技术技术方案的概述,为了让本领域普通技术人员能够更清楚地了解本技术的技术方案,进而可以依据说明书的文字及附图记载的内容予以实施,并且为了让本技术的上述目的及其它目的、特征和优点能够更易于理解,以下结合本技术的具体实施方式及附图进行说明。
附图说明
19.附图仅用于示出本技术具体实施方式以及其他相关内容的原理、实现方式、应用、特点以及效果等,并不能认为是对本技术的限制。
20.图1为本发明的一种电动增力式双低位锤肉机的锤头组件高位时正视图;
21.图2为本发明的一种电动增力式双低位锤肉机的锤头组件低位时正视图;
22.图3为本发明的一种电动增力式双低位锤肉机的锤头组件低位时左视图;
23.图4为本发明的一种电动增力式双低位锤肉机的局部视图。
24.附图标记说明:
25.1、滚桶模块;101、滚桶电机;102、蜗杆;103、涡轮;104、皮带;105、回转座;106a、主动带轮;106b、从动带轮;107、滚珠;108、滚桶;2、电动增力双锤模块;201、齿条;202、带齿轮增力电机;203、齿条导向座;204、导向杆组件;205、升降板;206、气缸安装座;207、气缸;208、锤头组件;209、储气罐;3、控制系统;301、开关组;302、触摸屏;303、气控阀组件;304、
plc控制器;4、机架体;5、肉泥导向组件。
具体实施方式
26.为详细说明本技术可能的应用场景,技术原理,可实施的具体方案,能实现目的与效果等,以下结合所列举的具体实施例并配合附图详予说明。本文所记载的实施例仅用于更加清楚地说明本技术的技术方案,因此只作为示例,而不能以此来限制本技术的保护范围。
27.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中各个位置出现的“实施例”一词并不一定指代相同的实施例,亦不特别限定其与其它实施例之间的独立性或关联性。原则上,在本技术中,只要不存在技术矛盾或冲突,各实施例中所提到的各项技术特征均可以以任意方式进行组合,以形成相应的可实施的技术方案。
28.除非另有定义,本文所使用的技术术语的含义与本技术所属技术领域的技术人员通常理解的含义相同;本文中对相关术语的使用只是为了描述具体的实施例,而不是旨在限制本技术。
29.在本技术的描述中,用语“和/或”是一种用于描述对象之间逻辑关系的表述,表示可以存在三种关系,例如a和/或b,表示:存在a,存在b,以及同时存在a和b这三种情况。另外,本文中字符“/”一般表示前后关联对象是一种“或”的逻辑关系。
30.在本技术中,诸如“第一”和“第二”之类的用语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何实际的数量、主次或顺序等关系。
31.在没有更多限制的情况下,在本技术中,语句中所使用的“包括”、“包含”、“具有”或者其他类似的表述,意在涵盖非排他性的包含,这些表述并不排除在包括所述要素的过程、方法或者产品中还可以存在另外的要素,从而使得包括一系列要素的过程、方法或者产品中不仅可以包括那些限定的要素,而且还可以包括没有明确列出的其他要素,或者还包括为这种过程、方法或者产品所固有的要素。
32.与《审查指南》中的理解相同,在本技术中,“大于”、“小于”、“超过”等表述理解为不包括本数;“以上”、“以下”、“以内”等表述理解为包括本数。此外,在本技术实施例的描述中“多个”的含义是两个以上(包括两个),与之类似的与“多”相关的表述亦做此类理解,例如“多组”、“多次”等,除非另有明确具体的限定。
33.在本技术实施例的描述中,所使用的与空间相关的表述,诸如“中心”“纵向”“横向”“长度”“宽度”“厚度”“上”“下”“前”“后”“左”“右”“竖直”“水平”“垂直”“顶”“底”“内”“外”“顺时针”“逆时针”“轴向”“径向”“周向”等,所指示的方位或位置关系是基于具体实施例或附图所示的方位或位置关系,仅是为了便于描述本技术的具体实施例或便于读者理解,而不是指示或暗示所指的装置或部件必须具有特定的位置、特定的方位、或以特定的方位构造或操作,因此不能理解为对本技术实施例的限制。
34.除非另有明确的规定或限定,在本技术实施例的描述中,所使用的“安装”“相连”“连接”“固定”“设置”等用语应做广义理解。例如,所述“连接”可以是固定连接,也可以是可拆卸连接,或成一体设置;其可以是机械连接,也可以是电连接,也可以是通信连接;其可以
是直接相连,也可以通过中间媒介间接相连;其可以是两个元件内部的连通或两个元件的相互作用关系。对于本技术所属技术领域的技术人员而言,可以根据具体情况理解上述用语在本技术实施例中的具体含义。
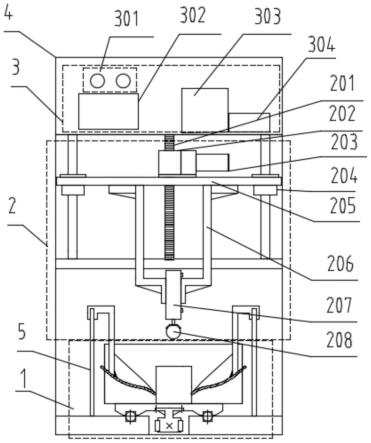
35.请参阅图1、图2、图3和图4,发明人提供了一种电动增力式双低位锤肉机。该电动增力式双低位锤肉机由滚桶模块1、电动增力双锤模块2、控制系统3、机架体4和肉泥导向组件5组成。其中,所述机架体4作为其他组成部件的装配基体。
36.作为本实施例的优选方案,所述滚桶模块1由滚桶电机101、蜗杆102、涡轮103、主动带轮106a、从动带轮106b、皮带104、滚珠107、回转座105和滚桶108组成。其中,所述涡轮102与主动带轮106a固定连接,所述从动带轮106b与所述回转座105固定连接,所述滚桶108与回转座105固定连接,所述回转座105的下端设置有可嵌入所述滚珠107的凹槽,所述机架体4通过所述滚珠107支撑所述回转座105,所述滚桶电机101直接驱动蜗杆102,进而依次经过所述涡轮103、主动带轮106a、皮带104、从动带轮106b、回转座105驱动所述滚桶108。滚珠107的功能类似轴承,使回转座105能在机架体4上相对旋转运动。
37.为了实现对肉泥锤打进行冲击力叠加的效果,作为本实施例的优选方案,所述电动增力双锤模块2由齿条201、带齿轮增力电机202、齿条导向座203、导向杆组件204、升降板205、气缸安装座206、两个气缸207、两套锤头组件208和储气罐209组成,所述齿条201固定安装在所述机架体4上,所述齿条201背面设置有与所述齿条导向座203配合的导轨,所述齿条导向座203安装在所述升降板4上,并与带齿轮增力电机202的壳体固定连接,所述带齿轮增力电机202与所述齿条201啮合传动,所述带齿轮增力电机202用于实现所述升降板4的升降运动,所述气缸安装座206固定在与所述升降板4上,所述气缸207固定安装在气缸安装座206上,每个所述锤头组件208对应固定安装在一个气缸207上,所述储气罐209用于气缸207作业时的高压气体快速补充。
38.所述控制系统3通过控制所述电动增力双锤模块2实现肉泥锤击过程的电动增力式击打效果。锤肉的冲击力分为初始击打力和叠加击打力。
39.首先,当所述plc控制器304控制所述气控阀组303使所述两套气缸207均通入高压气体时,所述两套锤头组件208均向下锤打肉泥,两套气缸207提供两套锤头组件208锤击过程的初始击打力。
40.其次,在所述气缸207向下伸出过程中,所述plc控制器304通过控制所述带齿轮增力电机202在所述齿条201上向下啮合运动,使所述齿条导向座203、升降板205、气缸安装座206、两套气缸207、两套锤头组件208一起向下运动,利用大配重为两套锤头组件208提供电动增力式锤击效果。
41.为了更均匀化地锤打肉泥,所述两套锤头组件208采用低位联动控制方案,当所述升降板205下降至低位阶段时一起向下锤打或向上收缩。
42.所述肉泥导向组件5固定安装在所述机架体4上,其延伸端处的变高度刮板用于将所述滚桶108中的肉泥高度刮低后输送至所述锤头组件208下方。
43.作为本实施例的优选结构,所述控制系统3由开关组301、触摸屏302、气控阀组件303和plc控制器304组成,所述plc控制器304根据所述开关组301和触摸屏302的输入信号,通过所述气控阀组件303对所述气缸207的工作状态进行控制,所述plc控制器304直接对带齿轮增力电机202和滚桶电机101的工作状态进行控制。
44.为了进一步说明本实施例所公布的一种电动增力式双低位锤肉机的具体工作过程,下面结合图1、图2、图3和图4介绍原理:
45.(1)控制对象工作参数的设定。
46.所述触摸屏302与所述plc控制器304之间采用双向参数交互,一方面所述plc控制器304接收来自所述触摸屏302所发送的调试参数输入信号,在工作前对所述气缸207的伸缩周期、带齿轮增力电机202和滚桶电机101的速度进行变更控制,另一方面所述plc控制器304将工作中的气缸207伸缩周期、带齿轮增力电机202和滚桶电机101的速度信息传送并显示在所述触摸屏上。这样,通过触摸屏302的输入功能,可以实现整机相关控制对象的工作参数设定。
47.(2)依据输入信号进行锤肉“启动”或“停机”作业。
48.所述开关组301包括“启动”或“停机”两种输入信号,所述plc控制器304依据这两种输入信号对所述气缸207、带齿轮增力电机202和滚桶电机101的工作状态进行对应的控制。
49.当接收到所述开关组301“启动”输入信号时,所述plc控制器304分别控制所述滚桶电机101进入恒速转动、所述气缸207上下同时伸缩运动,并在所述气缸207下行时,控制带齿轮增力电机202进入电动增力式击打。
50.当接收到所述开关组301“停机”控制信号时,所述plc控制器304分别控制所述滚桶电机101停止工作、每个所述气缸207均处于上位置、带齿轮增力电机202驱动升降板205处于上位置。这样,方便现场工人进行取肉泥和重新投放新肉等操作。
51.在本实施例中,动力机构或动力单元,包括但不限于发动机、电机、气动工具、液压泵等等。动力单元还包括直接动力源以及间接动力源,直接动力源为可自身提供动力,例如发动机、电机等,间接动力源包括气缸、液压缸等。动力机构或动力单元可以通过齿轮齿条相配合、滑块与滑槽相配合、丝杠与螺母相配合驱动执行单元的直线往复运动等等。
52.传动机构或传动单元,包括减速机、变速箱、蜗轮蜗杆机构、连杆机构、复合机构等等。执行机构或执行单元,包括但不限于压缩机构、旋转机构、摆动机构、振动机构、升降机构、切割机构等等。
53.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本发明的专利保护范围。因此,基于本发明的创新理念,对本文所述实施例进行的变更和修改,或利用本发明说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本发明的专利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。