1.本发明涉及透镜系统,以及用于控制该透镜系统的方法和计算机程序产品。
背景技术:
2.本文提供的“背景”描述是为了一般地呈现本公开的上下文。当前提名的发明人的工作,就该工作在这个背景部分中被描述的程度而言,以及在提交时可能没有以其它方式被限定为现有技术的本描述的各方面,既没有明确地承认也没有暗示地承认作为针对本发明的现有技术。
3.近年来,使用例如电荷耦合器件(ccd)或互补金属氧化物半导体(cmos)等光电转换成像装置的成像系统,在使用中经历了迅速的扩展。在一定程度上,这是由于最近在微制造技术中的技术进步,其使得操作成像系统所需的处理电路(以及用于存储由成像系统捕获的图像所需的存储单元)能够并入更广泛的电子设备中,包括便携式电子设备(例如移动电话、平板计算设备和笔记本电脑设备)。
4.透镜系统成为这些电子设备中使用的成像系统的关键部件。透镜系统将来自场景的光聚焦到成像系统的成像装置上,使得成像装置将来自场景的光转换成电输出,电输出本身被转换成场景的数字图像。随着将成像系统并入便携式电子设备中,希望减小透镜系统的体积和形状因数。然而,这很难实现,尤其是在包括变焦镜头(例如长焦镜头)的成像系统中。这是因为变焦透镜提供的变焦水平取决于透镜系统的最大焦距(随着焦距的增加,沿透镜系统光轴的长度增加)。
5.因此,很难获得具有所需光学性质的透镜系统和成像装置,同时其形状因数适合于并入便携式电子设备。
6.本公开的目的是解决这些问题。
技术实现要素:
7.以下提供关于本公开的简要概述,以提供与本公开的特定方面有关的基本理解。
8.根据本发明的第一方面,提供了一种用于成像装置的透镜系统,该透镜系统包括:第一透镜组,其具有沿透镜系统的光轴z的固定位置,第一透镜组包括一对透镜,一对透镜中的每一个具有至少一个是自由曲面的透镜表面,一对透镜能被配置为沿透镜系统的光轴z至少部分重叠,一对透镜中的每一个透镜具有相同的形状并沿透镜系统的光轴z相对于彼此对向旋转;以及第二透镜组,沿透镜系统的光轴z布置,包括多个旋转对称的透镜;其中,第一透镜组的一对透镜的第一透镜配置为能沿与透镜系统的光轴z垂直的透镜系统的y轴移动,并且第一透镜组的一对透镜的第二透镜配置为根据一对透镜的第一透镜的移动能沿y轴与一对透镜的第一透镜相反的方向移动,以改变透镜系统的折射能力;并且其中第二透镜组被配置为可根据一对透镜沿y轴的移动而沿透镜系统的光轴z移动,以保持透镜系统的图像位置。
9.根据本发明的第二方面,提供了一种控制用于成像装置的透镜系统的方法,透镜
系统包括:第一透镜组,其具有沿所述透镜系统的光轴z的固定位置,第一透镜组包括一对透镜,一对透镜中的每一个具有至少一个是自由曲面的透镜表面,一对透镜能被配置为沿透镜系统的光轴z至少部分重叠,一对透镜中的每一个透镜具有相同的形状并沿透镜系统的光轴z相对于彼此对向旋转;以及第二透镜组,沿透镜系统的光轴x布置,包括多个旋转对称的透镜;其中方法包括:控制第一透镜组的一对透镜中的第一透镜沿垂直于透镜系统的光轴z的透镜系统的y轴的移动,并根据一对透镜中的第一透镜沿y轴的移动,控制第一透镜组的一对透镜中的第二透镜沿y轴在与一对透镜中的第一透镜的相反方向的移动,以改变所述透镜系统的折射能力;以及根据一对透镜沿y轴的移动来控制第二透镜组沿透镜系统的光轴z的移动,以保持透镜系统的图像位置。
10.根据本公开的第三方面,一种计算机程序产品,包括指令,其中,当程序由计算机执行时,提供了一种引起计算机执行控制用于成像装置的透镜系统的方法,透镜系统包括:第一透镜组,其具有沿透镜系统的光轴z的固定位置,第一透镜组包括一对透镜,一对透镜中的每一个具有至少一个是自由曲面的透镜表面,一对透镜能被配置为沿透镜系统的光轴z至少部分重叠,一对透镜中的每一个透镜具有相同的形状并沿透镜系统的光轴z相对于彼此对向旋转;以及第二透镜组,沿透镜系统的光轴x布置,包括多个旋转对称的透镜;其中方法包括:控制第一透镜组的一对透镜中的第一透镜沿垂直于透镜系统的光轴z的透镜系统的y轴的移动,并根据一对透镜中的第一透镜沿y轴的移动,控制第一透镜组的一对透镜中的第二透镜沿y轴在与一对透镜中的第一透镜的相反方向的移动,以改变所述透镜系统的折射能力;以及根据一对透镜沿y轴的移动来控制第二透镜组沿透镜系统的光轴z的移动,以保持透镜系统的图像位置。
11.利用根据本发明实施方式的透镜系统、方法和计算机程序产品,可以显著减小变焦透镜沿其光轴的长度和形状因数,同时将第一透镜组(包括一对自由曲面透镜)和图像平面保持在沿光轴的固定位置。本发明并不特别限于这些技术效果,还可能存在其他技术效果,在本领域技术人员在阅读本发明时将变得明显。
附图说明
12.当结合附图考虑时,通过参考以下详细描述将更好地理解本公开及其伴随的许多优点,将容易获得对本公开的更完整的理解,其中:
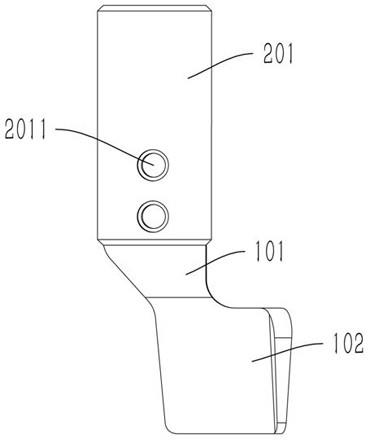
13.图1示出了根据本公开的实施方式的透镜系统;
14.图2a示出了当从广角状态改变到长焦状态时,根据本公开的实施方式的透镜系统的透镜的移动;
15.图2b示出了当从广角状态改变到长焦状态时,根据本公开的实施方式的透镜系统的透镜的移动;
16.图3示出了可应用根据本公开实施方式的透镜系统的成像设备的配置;
17.图4a示出了根据本公开实施方式的yz平面中的透镜系统的具体示例;
18.图4b示出了根据本公开实施方式的yz平面中的透镜系统的具体示例;
19.图5a示出了根据本公开的实施方式的xz平面中的透镜系统的具体示例;
20.图5b示出了根据本公开的实施方式的xz平面中的透镜系统的具体示例;
21.图6a示出了根据本公开的实施方式的由处于长焦状态的示例透镜系统产生的光
斑图;
22.图6b示出了根据本公开的实施方式的由处于广角状态的示例透镜系统产生的光斑图;
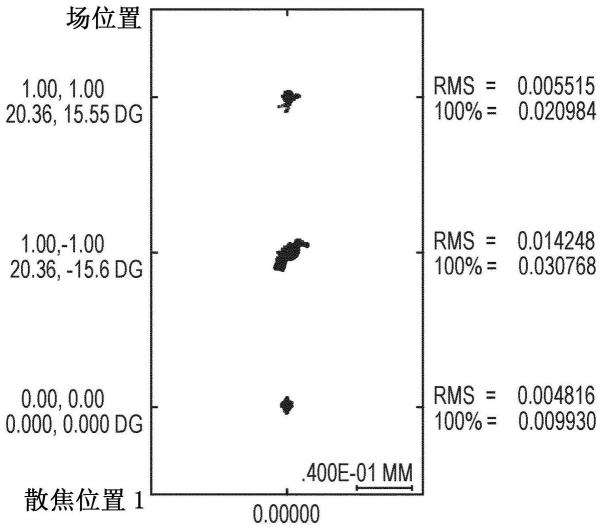
23.图7a示出了根据本公开的实施方式的由处于长焦状态的示例透镜系统产生的光斑图;
24.图7b示出了根据本公开的实施方式的由处于广角状态的示例透镜系统产生的光斑图;
25.图8a示出了根据本公开的实施方式的处于长焦状态的示例透镜系统的畸变;
26.图8b示出了根据本公开的实施方式的处于广角状态的示例透镜系统的畸变;
27.图9a示出了根据本公开的实施方式的yz平面中的透镜系统的具体示例;
28.图9b示出了根据本公开的实施方式的yz平面中的透镜系统的具体示例;
29.图10a示出了根据本公开的实施方式的xz中的透镜系统的具体示例;
30.图10b示出了根据本公开的实施方式的xz中的透镜系统的具体示例;
31.图11a示出了根据本公开的实施方式的处于长焦状态的示例透镜系统的畸变;
32.图11b示出了根据本公开的实施方式的处于广角状态的示例透镜系统的畸变;
33.图12a示出了根据本公开的实施方式的由处于长焦状态的示例透镜系统产生的光斑图;
34.图12b示出了根据本公开的实施方式的由处于广角状态的示例透镜系统产生的光斑图;
35.图13示出了根据本公开的实施方式的示例车辆控制系统;
36.图14示出了根据本公开的实施方式的成像装置在车辆上的示例性放置;
37.图15示出了根据本公开的实施方式的控制透镜系统的方法。
具体实施方式
38.现在参考附图,其中类似的参考数字表示贯穿多个视图的相同或相应的部分。
39.一种已知的可变焦距透镜系统(变焦透镜)包括多个透镜组,这些透镜组能沿透镜系统的光轴方向移动。透镜组沿透镜系统的光轴方向的移动改变透镜系统的焦距,并将图像平面保持在沿光轴的恒定位置。通常,当透镜系统处于广角状态(焦距最小)时,透镜系统处于其最紧凑的形式(沿光轴的长度最小)。增加透镜系统的焦距将增加透镜系统提供的变焦级别。然而,增加系统的焦距需要多个透镜组沿透镜系统的光轴移动,这增加了透镜系统沿光轴的总轨道长度。这增加了透镜系统的体积和形状因数,限制了结合透镜系统的成像装置的紧凑性。
40.就此而言,希望提供一种具有轨道长度减小的可变焦距透镜系统,该系统具有沿透镜光轴的恒定图像平面位置。
41.因此,根据本公开的实施方式提供了一种用于成像装置的透镜系统。
42.透镜系统:
43.根据本发明实施方式的透镜系统,包括:第一透镜组,具有沿透镜系统的光轴z的固定位置,第一透镜组包括一对透镜,一对透镜中的每一个具有至少一个是自由曲面的透镜表面,一对透镜能被配置为沿透镜系统的光轴z至少部分重叠,一对透镜中的每一个透镜
具有相同的形状并沿透镜系统的光轴z相对于彼此对向旋转。透镜系统还包括:沿透镜系统的光轴z布置的第二透镜组,第二透镜组包括多个旋转对称的透镜。在根据本发明实施方式的透镜系统中,第一透镜组中的第一透镜被配置为能沿透镜系统的y轴(其垂直于透镜系统的光轴z)移动,第一透镜组中的一对透镜中的第二透镜被配置为可根据一对透镜中的第一透镜的移动沿y轴在与一对透镜中的第一透镜相反的方向移动,以改变透镜系统的折射能力。第二透镜组被配置为可根据一对透镜沿y轴的移动而沿透镜系统的光轴z移动,以保持透镜系统的固定图像位置。
44.图1示出了根据本公开实施方式的用于成像装置的示例透镜系统100。透镜系统100是可变焦距(变焦)透镜系统。
45.在图1的示例说明中,z轴被定义为沿图像系统100的光轴z1的轴。y轴垂直于系统的z轴,并且相对于图像系统100垂直定向。x轴定义为既垂直于z轴又垂直于y轴的轴。
46.透镜系统100包括第一透镜组g1。第一透镜组g1的位置固定在透镜系统100的光轴z1上。即,第一透镜组g1配置在透镜系统100的光轴z1上的一位置,并且在透镜系统的操作期间(即,当透镜系统100从广角状态移动到长焦状态时)保持在透镜系统100的光轴z1上的该位置。换而言之,第一透镜组g1不需要沿着透镜系统100的光轴z1移动。
47.第一透镜组g1包括一对透镜102a和102b。第一透镜组g1的一对透镜中的第一透镜102a和第二透镜102b中的每一个具有至少一个作为自由曲面的透镜表面。即,第一透镜组g1的一对透镜中的第一透镜102a和第二透镜102b是自由曲面透镜。这两个自由曲面透镜形状相同。然而,第二透镜102b与第一透镜102a关于透镜系统的光轴z1对向布置(旋转180度)。
48.如图1所示,在沿透镜系统100的光轴z1观察时,第一透镜组gl的一对透镜中的第一透镜102a和第二透镜102b可布置成部分重叠。也就是说,当沿着透镜系统100的光轴z1观看时,第一透镜102a和第二透镜102b的至少一部分可以被布置成重叠,使得这对透镜沿着透镜系统的光轴z1提供组合的折射能力。
49.第一透镜组g1的一对透镜中的第一透镜102a和第二透镜102b中的每一个被配置为能沿透镜系统的y轴移动。这将参考本公开的图2更详细地解释。
50.透镜系统100还包括第二透镜组g2。第二透镜组沿着透镜系统100的光轴z1布置(即,当沿着该透镜系统的光轴z1观察时,使得第二透镜组g2的至少一部分拦截透镜系统100的光轴z1)。
51.透镜系统100的第二透镜组g2包括多个旋转对称的透镜104。这些旋转对称透镜104例如可以包括球面透镜和/或非球面透镜。第二透镜组g2在使用中沿着透镜系统100的y轴保持在固定位置。但是,第二透镜组g2被配置为在使用中能沿透镜系统100的z轴移动。具体地说,第二透镜组g2的位置可在第一透镜组g1的固定位置与图像平面106之间沿光轴z1移动。
52.现参考图2a和2b,示出了当从广角状态改变到长焦状态时,根据本公开的实施方式的透镜系统100的透镜的移动。
53.在图2a和2b的示例中,第二透镜组g2由单个元件示出。然而,应理解,如参考本公开的图1所述,第二透镜组g2包括多个旋转对称的透镜。即,在一些示例中,可以在第二透镜组中设置多个旋转对称的透镜。
54.图2a示出了处于第一状态的透镜系统100。在该第一状态下的透镜系统的配置是当选择低变焦能力时可变焦距透镜系统的配置。即,第一状态是透镜系统100的广角状态。
55.如参考本公开图1所述,在使用期间,第一透镜102a和第二透镜102b中的每一个保持在沿着透镜系统100的光轴z1的固定位置,但是被配置为可以沿着透镜系统的y轴独立地移动。换而言之,第一透镜102a和/或第二透镜102b相对于透镜系统的光轴z1的位置可以沿y轴垂直位移。此外,第二透镜组g2的位置能沿透镜系统的光轴z1移动(但保持在沿y轴的固定位置)。
56.因此,在该示例的广角状态下,第一对自由曲面透镜可以被配置成使得第一透镜102a和第二透镜102b的预定部分沿光轴z1重叠。即,第一透镜102a和第二透镜102b的第一组透镜g1的组合折射能力部分地确定透镜系统100的有效焦距。透镜的组合折射能力的降低增加了系统的焦距并增加了由透镜系统提供的变焦(或放大率)。因此,在最大广角配置中,第一透镜102a和第二透镜102b沿着y轴布置,以便产生透镜系统100的最高组合折射能力(最低有效焦距)
57.第二组透镜g2沿透镜系统100的光轴的位置被配置为:使得对于第一透镜组g1的第一透镜102a和第二透镜102b的布置(即,对于该配置中的透镜系统的给定焦距),图像平面位于沿透镜系统100的光轴z1的位置106。
58.在本公开的图2b中示出了处于第二状态的透镜系统100的配置。与本公开的图2a所示的第一状态相比,第一透镜组和第二透镜组的透镜的位置被改变,以便改变透镜系统100的焦距。具体地说,在本公开的图2b所示的第二状态下的透镜系统100的配置使得与在图2a所示的第一状态下的透镜系统的焦距相比,透镜系统100的焦距增加。因此,图2a所示的第一状态表示广角配置中的透镜系统100的配置,而图2b所示的第二状态表示长焦配置中的透镜系统100的配置。
59.可以理解,第一透镜组g1和第二透镜组g2的位置可以在第一配置(如图2a所示)和第二配置(如图2b所示)之间平滑地变化,从而可以通过透镜系统100实现这两个示例配置之间的任何期望焦距。
60.现在,与图2a所示的状态相比,第一透镜102a和第二透镜102b已经沿着透镜系统的y轴移动。第一透镜102a和第二透镜102b之间的位置的相对改变提供了透镜系统100的组合折射能力的改变,从而导致透镜系统100的焦距的改变。这是因为:自由曲面透镜沿y轴的移动导致具有不同形状和/或厚度的自由曲面透镜的一不同部分与透镜系统的光轴对准。现在,在该示例中,透镜102a和102b已经沿着透镜系统100的y轴(在相反方向上)移动了相似量。即,第一透镜102a已经沿透镜系统100的y轴垂直向上移动了第一量,而第二透镜102b已经沿着透镜系统100的y轴垂直向下移动了第二量(第二量的量值与第一量的量值相似)。然而,在一些示例中,第一透镜组g1的两个透镜102a和102b可以沿着透镜系统100的y轴在相反的方向上移动相同量。在其他示例中,第一透镜系统的透镜中只有一个透镜将沿着透镜系统的y轴移动,以引起第一透镜102a和第二透镜102b的相对位置的改变。
61.如上所述,第一自由曲面透镜102a和第二自由曲面透镜102b沿着透镜系统100的y轴的这种相对移动导致透镜系统100的焦距的改变。同样地,在透镜系统100中,可以将改变透镜系统焦距所需的透镜的沿着光轴方向的移动替换为沿着与系统的光轴垂直的轴(在本示例中为透镜系统的y轴)的小位移。这使得可变焦距透镜系统的形状因数减小,或者更具
体地说是长度减小。
62.透镜系统的焦距的改变(其归因于第一透镜组的第一透镜和第二透镜的相对移动)导致沿透镜系统的光轴z1的图像位置改变。这是不希望的,因为它需要图像传感器沿着透镜系统的光轴z1移动,以便图像传感器仍然可以捕获由透镜系统100产生的清晰图像。此外,图像传感器沿光轴的移动使得图像传感器位于透镜系统的图像平面处,将导致透镜系统100沿透镜系统100的光轴zl的长度增加。
63.然而,根据本发明的实施方式,提供了能沿透镜系统100的光轴zl移动的第二透镜组g2,使得第二透镜组g2可以移动,以补偿透镜系统焦距的变化并保持沿透镜系统的光轴zl的图像平面的位置稳定。即,如图2a和2b所示,当透镜系统100从广角状态改变到长焦状态(或者实际上在这两者之间的透镜系统的任意焦距)时,第二透镜组g2沿着透镜系统100的光轴z1移动,使得在使用期间(即,对于透镜系统100的任何配置)图像平面保持在沿着透镜系统100的光轴z1的固定位置。
64.换而言之,透镜系统100的第二组g2根据第一透镜组g1的移动而沿着透镜系统100的光轴zl的移动补偿了伴随焦距变化的图像平面位置的变化。
65.因此,可以理解,当从广角状态改变到长焦状态时,透镜系统100沿光轴的长度(定义为第一透镜组g1与图像平面106在透镜系统的光轴上的位置之间的距离)保持不变(焦距的改变由第一透镜组沿透镜系统的y轴的小位移提供)。因此,利用根据本发明实施方式的透镜系统100,可以显著减小变焦透镜沿其光轴的长度和形状因数,同时将第一透镜组和图像平面保持在沿光轴的固定位置。
66.此外,对于第一透镜102a和第二透镜102b使用相同形状的透镜(沿着透镜系统100的光轴z1对向地旋转)对于透镜系统的鲁棒性特别有效。即,由于自由曲面透镜的形状平滑地改变(在某些例子中,可以描述为“s”形),由两个自由曲面的移动量的波动和偏心引起的任何性能恶化都被减小。
67.事实上,随着由不对称透镜形状引起的像差被抵消和减小,沿着透镜系统100的z轴在相反方向上移动相同或相似大小对于获得良好的光学性能特别有效。
68.透镜表面:
69.应当理解,可以使用多个不同的多项式表达式来描述根据本发明的实施方式的第一透镜组的第一透镜和第二透镜的自由曲面透镜表面的形状。
70.在某些示例中,可以使用xy多项式来表示第一透镜组g1的第一和/或第二自由透镜的自由曲面的形状:
[0071][0072]
在这个方程中,z
sag
是透镜表面的z轴方向的sag(表面轮廓)量,c是顶点曲率,r是径向距离,k是圆锥曲线常数,c3到c
66
是xy多项式的系数。参照本公开的图4(下面会更详细
地描述)提供使用xy多项式定义的透镜系统的具体数值示例。
[0073]
透镜系统的自由曲面透镜被配置成能沿透镜系统的y轴方向移动。因此,可以选择自由曲面透镜的形状以便对称于y-z平面。这意味着只需要使用x的偶数次的多项式系数。此外,在某些示例中,第一透镜组g1的第二自由曲面透镜的形状被选择为具有与透镜系统的第一自由曲面透镜相同的形状,但绕z轴与第一自由曲面透镜对向地布置(旋转180度),使得y的奇数次系数改变符号,同时对于第一自由曲面透镜和第二自由曲面透镜上的相同系数可以保持相同的值。
[0074]
或者,在某些示例实施例中,第一透镜组g1的第一和/或第二自由曲面表面的形状可以使用一组最高12阶的fringe zernik多项式来表示,并添加到基础圆锥曲线中:
[0075][0076]
在这个方程中,z
sag
是透镜表面z轴方向的sag量,c是顶点曲率,r是径向距离,k是圆锥曲线常数,zfj是j阶fringe zernik多项式(j的取值范围:1到37),cj是zfj的系数。参照本公开的图9(下面更详细地描述)提供使用fringe zernik多项式定义的透镜系统的具体示例。
[0077]
此外,在某些示例中,透镜系统100的第二透镜组g2的透镜的旋转对称非球面可表示为:
[0078][0079]
其中,z
sag
为透镜表面z轴方向的sag量,c为顶点曲率,r为径向距离,k为圆锥曲线常数,a到j为非球面系数。参考本公开的图4和图9(在下面更详细地定义)提供了这些透镜的具体数字示例。
[0080]
透镜系统的配置:
[0081]
接下来,将描述根据本公开的实施方式的可变焦距透镜系统的示例配置。
[0082]
根据本公开的实施方式,可变焦距透镜系统的折射能力的改变基于第一透镜组g1的第一自由曲面透镜和第二自由曲面透镜沿透镜系统的y轴的移动量。这使得变焦比(最大长焦状态下的焦距/最大广角状态下的焦距)能够增加。然而,这种配置中潜在的像差也随之增加。
[0083]
因此,在某些示例中,对于可变焦距透镜系统,希望满足以下条件表达式(4):
[0084][0085]
其中,是在透镜系统的最大广角状态下第一透镜组的一对透镜的组合轴向折射能力,fw是在最大广角状态下透镜系统的焦距。
[0086]
此外,在某些示例中,对于在最大长焦位置处的可变焦距透镜系统,期望满足以下条件表达式(5):
[0087][0088]
其中,是在透镜系统的最大长焦状态下的第一透镜组的一对透镜的组合轴
向折射能力,ft是在最大长焦状态下的透镜系统的焦距。
[0089]
为了避免图像中的变形效应,在每个变焦位置上,关于透镜系统的相应焦距,两个自由曲面透镜沿x轴和y轴的折射能力差应很小。因此,在某些示例中,对于可变焦距透镜系统,希望满足以下条件表达式(6)和(7):
[0090][0091][0092]
其中,是在透镜系统的最大广角状态下,第一透镜组的一对透镜沿透镜系统的x轴(其垂直于透镜系统的y轴和光轴z)的组合轴向折射能力;为在最大广角状态下第一透镜组的一对透镜沿y轴的组合轴向折射能力;是在透镜系统的最大长焦状态下,第一透镜组的一对透镜沿x轴的组合轴向折射能力;为在透镜系统的最大长焦状态下第一透镜组的一对透镜沿y轴的组合轴向折射能力;fw为透镜系统在最大广角状态下的焦距;ft是透镜系统在最大长焦状态下的焦距。
[0093]
在某些示例中,超过条件表达式(6)和(7)的上限或者低于这些极限是不可取的,因为x轴方向和y轴方向之间的场角差变大。
[0094]
具体地,在某些示例中,为了进一步增强透镜系统的性能,即使被摄体位置从无穷远变化到近距离,自由曲面透镜在x轴方向和y轴方向之间的折射能力差(透镜系统的焦距差的原因)也应该最小。如果x轴方向和y轴方向之间的焦点长度差变大,则两个方向之间的焦点位置偏移。因此,在某些示例中,对于可变焦距透镜系统,希望满足以下条件表达式(8)和(9):
[0095][0096][0097]
其中,是在透镜系统的最大广角状态下,第一透镜组的一对自由曲面透镜沿透镜系统的x轴(其垂直于透镜系统的y轴和光轴)z的组合轴向折射能力;为在最大广角状态下第一透镜组的一对透镜沿y轴的组合轴向折射能力;是在透镜系统的最大长焦状态下,第一透镜组的一对透镜沿x轴的组合轴向折射能力;是在透镜系统的最大长焦状态下,第一透镜组的一对透镜沿y轴的组合轴向折射能力。
[0098]
此外,在某些示例中,应满足下列条件表达式以获得高光学性能,同时使透镜尺寸最小化:
[0099]
0.2<|δla|/ft<0.85
[0100]
ꢀꢀꢀꢀꢀꢀ
(10)
[0101]
0.2<|δlb|/ft<0.85
[0102]
ꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0103]
其中,δla是当透镜系统从最大广角状态改变到最大长焦状态时第一透镜组的一对透镜中的第一透镜沿y轴的移动,δlb是当透镜系统从最大广角状态改变到最大长焦状
态时第一透镜组的一对透镜中的第二透镜沿y轴的移动,ft是透镜系统在最大长焦状态下的焦距。
[0104]
条件表达式(10)和(11)用于定义第一透镜组的第一自由曲面透镜和第二自由曲面透镜的移位量。条件表达式(10)和(11)中的焦距ft也可以改写为fw
×
z,其中fw是可变焦距透镜系统的最大广角位置处的焦距,z是透镜系统的变焦比(在最大长焦透镜状态和最大广角透镜状态之间)。
[0105]
在焦距fw处,透镜系统通常处于其变焦范围的最紧凑的初始位置,因此在条件范围内使用它来将自由曲面透镜的运动归一化到该位置。最后,使用条件表达式(10)和(11)来定义自由曲面透镜的移位量与变焦比z的关系。
[0106]
如果超过条件表达式(10)和(11)的上限,则自由曲面透镜的移动变大,因此,在y方向上的整个透镜尺寸变大。因此,条件表达式(10)和(11)能够进一步降低本公开的可变焦距透镜系统的形状因数。
[0107]
为了变焦,从透镜系统的长焦状态到透镜系统的广角状态,第一透镜组的第一自由曲面透镜和第二自由曲面透镜沿着系统的y轴逐渐(平滑)移动。这导致透镜系统的折射能力的组合变化(改变透镜系统的焦距)。焦距的变化使第一自由曲面透镜和第二自由曲面透镜中的光线通量移动。为了减少场相关像差的引入,光轴z1和主光线之间的夹角应该窄,这意味着自由曲面透镜应该优先定位在靠近孔径光阑或其图像之一的位置,即透镜系统的入瞳或出瞳处。
[0108]
附加修改:
[0109]
用于构造透镜系统的透镜的透镜材料(包括用于构造第一自由曲面透镜和第二自由曲面透镜的透镜材料)没有特别限制。例如,在某些情况下,透镜可以由塑料材料形成。在其他示例中,透镜可以由玻璃材料形成。事实上,使用玻璃材料可能是特别有利的,因为使用玻璃材料减少了透镜系统的色差。
[0110]
替代性地,或者附加地,衍射光学元件可以结合在透镜系统中,以便补偿系统的色差。衍射光学元件沿透镜系统光轴的位置没有特别限制。
[0111]
此外,在某些示例中,可以在透镜系统(包括第一透镜组和第二透镜组)和图像传感器之间设置光学低通滤波器以避免摩尔纹(moire)。红外截止滤光片等也可用于优化图像传感器的灵敏度。
[0112]
根据本发明的实施方式,第一透镜组g1可在垂直于透镜系统的光轴的方向上移动(即,能沿透镜系统的y轴移动)。同样,第二透镜组g2可在平行于透镜系统的光轴的方向上移动(即,能沿z轴移动)。因此,可以在透镜系统中包括驱动系统,以便驱动第一透镜组和第二透镜组的移动。驱动系统至少部分地基于透镜位置信息给出驱动量以移动透镜。驱动系统还可以基于用户输入或指令给出驱动量以移动透镜。在一些示例中,透镜可以通过电机移位,然而,根据本公开的实施方式的需要,可以使用移动透镜位置的任何合适的方式(包括手动操作)。
[0113]
当在图像捕获设备中使用时,透镜系统还可以与检测系统和算术系统组合,以用作减振系统,其用于校正由于快门释放时产生的相机抖动等引起的图像模糊。在这种情况下,检测系统检测相机的抖动角度并输出相机抖动信息。驱动系统然后可以移动第一透镜组和第二透镜组的透镜,以便补偿相机抖动并减少图像模糊。
[0114]
成像装置:
[0115]
如上所述,本公开的透镜系统100可应用于成像装置,例如图像捕获设备。图3示出了可应用本公开的透镜系统100的成像装置300的示例配置。通常,成像装置300是数位相机(digital still camera)。可选地,成像装置300是用于捕获视频的数码相机。本公开的透镜系统100还可以应用于其他成像装置,例如数字单反相机、数字无反光相机、数字视频相机、监视相机(包括闭路电视相机系统(cctv camera system))等。
[0116]
另外,透镜系统100可以应用为数字输入/输出设备的相机单元,或者可以提供给可互换镜头系统。例如,透镜系统100可以结合在便携式电子设备(例如移动电话、笔记本电脑、平板计算设备等)内。
[0117]
成像装置300包括相机或图像捕获单元310、相机信号处理单元320、图像信号处理单元330、显示单元340、存储单元350、中央处理单元360、输入单元370和透镜驱动控制单元380。
[0118]
相机单元310被配置为执行成像功能。相机单元310可以包括光学系统(包括成像透镜301和成像元件302)。成像元件302可以是电荷耦合器件(ccd)或互补金属氧化物半导体(cmos)。成像元件被配置为将与成像透镜301产生的光学图像相对应的成像信号(图像信号)输出为电信号。成像透镜可以包括可变焦距透镜系统100。
[0119]
信号处理单元320对成像元件302输出的图像信号执行各种信号处理,例如模数转换、降噪、图像质量校正、到亮度和色差信号等的转换等。
[0120]
图像处理单元330执行(由信号处理单元320输出的)图像信号的记录/再现处理。此外,在某些示例中,图像处理单元330可以基于预定的图像数据格式、诸如分辨率等的数据规范的转换处理来执行图像信号的压缩编码和/或扩展解码处理。
[0121]
显示单元340可以被配置为执行显示数据的功能,例如用户在输入单元370上的操作状态和/或拍摄的图像。在某些示例中,显示单元是液晶显示器(lcd)。即,显示单元340可以是监测器或类似的允许用户可视化系统的操作和/或由系统捕获的图像的某种设备。尽管显示单元340被示为集成在成像装置300内,但可选地,显示单元340可以在成像装置300的外部。在这种情况下,显示单元340可以是打印机、投影仪或允许显示由成像装置300捕获的图像的某个其他设备。
[0122]
存储单元350将由图像处理单元330编码的图像数据写入存储器,并根据需要从存储器读取记录的图像数据。在一些示例中,存储器可以是存储卡,例如可以由用户连接到成像装置300并从成像装置300分离的半导体存储器。事实上,存储单元350可以包括磁可读介质、光可读介质或固态电路。存储单元350可以集成到成像装置300中,或者可以与成像装置300分离并使用有线或无线连接连接到成像装置300。
[0123]
中央处理单元360被配置为执行控制成像装置300的单元的操作的功能。中央处理单元360可以在从输入单元370接收的用户的指令下控制设备的操作。中央处理单元360可以是执行计算机指令的微处理器,或者可以是专用集成电路。计算机指令可以存储在存储介质或存储单元350上。计算机指令可以体现为包含计算机可读代码的计算机软件,当加载到中央处理电路360上时,该计算机可读代码配置中央处理电路360以执行根据本发明实施方式的方法。
[0124]
输入单元370可以包括使用户能够控制成像装置的操作的多个按钮和/或开关。输
入单元例如包括用于执行快门操作的快门释放按钮、用于选择操作模式的选择开关等。或者,输入单元370可以是触摸屏,或者可以是鼠标或笔类输入设备。输入单元370还可以是键盘、虚拟键盘或这些设备的任何组合。因此,输入单元370根据用户执行的操作向中央处理单元360输出指令输入信号,用于控制成像装置300的操作。
[0125]
最后,透镜驱动控制单元380控制设置在相机单元310中的镜头的驱动。在具体示例中,透镜驱动控制单元380可以基于由中央处理单元360输出的控制信号来控制驱动成像透镜301的每个透镜的电机(未示出)。
[0126]
在示例操作中,成像装置300可以处于摄像待机状态。在该状态下,在中央处理单元360的控制下,在相机单元310中拍摄的图像信号经由相机信号处理单元320输出到显示单元340,并显示为透过相机图像。例如,当从输入单元370输入用于变焦或聚焦的指令输入信号时,中央处理单元360向透镜驱动控制单元380输出控制信号,并且可包括透镜系统100的成像透镜301基于透镜驱动控制单元380的控制移动。
[0127]
当相机单元310的快门(未示出)由来自输入单元370的指令输入信号(通过输入单元370的用户操作接收)操作时,拍摄的图像信号从相机信号处理单元320输出到图像处理单元330,并执行压缩编码处理。即,从相机信号处理单元320输出的图像信号由图像处理单元330转换成指定或预定数字数据格式的数字数据。转换后的数据被输出到存储单元350并存储在存储器中。
[0128]
在某些示例中,当用户半按或全按成像装置300的快门释放按钮以记录(或拍摄)图像时,可以执行图像聚焦。在中央处理单元360的控制下,通过成像透镜301的预定透镜的移动来执行聚焦。
[0129]
当再现记录在存储器中的图像数据时,响应于输入单元370的操作从存储器读取指定的图像数据,并且图像处理单元330解压缩和解码图像数据。在处理之后,将再现的图像信号输出到显示单元340,并将再现的图像显示给用户。
[0130]
当然,应当理解,成像装置300的操作不限于拍摄待机状态的该示例。可以根据需要执行成像装置300的许多其他状态、模式和操作。
[0131]
具体数值示例:
[0132]
接下来,描述可变焦距透镜系统100的具体数值示例,包括自由曲面透镜的具体示例。然而,要理解,本公开的实施方式不旨在限于这些具体示例。
[0133]
在这些示例中,表面数表示从物体侧到图像表面侧的表面计数器的数目。曲率半径表示第i个表面的曲率半径的值(mm)。间距是第i个表面和第i 1个表面之间的轴向表面距离(表示透镜中心的厚度或气隙值(mm))。折射率表示从第i个表面开始的透镜等的e线(波长546nm)处的折射率值。阿贝数表示从第i个表面开始的透镜等的e线处的阿贝数的值。此外,表面形状指示各个透镜表面的表面形状的类型。而且,在每个表中,e-n表示一个以10为基数的指数表达式。
[0134]
《数值示例1》
[0135]
图4a和4b示出了在y-z平面中示出的根据本公开实施方式的透镜系统400的示例配置。在这个例子中,z轴被定义为沿着透镜系统的光轴的轴。y轴被定义为垂直于该轴的轴(并且是自由透镜沿其移动以改变透镜系统焦距的轴)。x轴是同时垂直于z轴和y轴的轴。
[0136]
图4a示出了处于长焦透镜状态的透镜系统400,图4b示出了处于广角透镜状态的
透镜系统400。
[0137]
图5a和5b分别示出了与图4a和4b所示的相同的长焦状态和广角状态下的x-z平面中的透镜系统400。
[0138]
在透镜系统400中,示出了第一透镜组g1和第二透镜组g2。第一透镜组g1包括第一透镜l1a和第二透镜l1b。第一透镜l1a和第二透镜l1b中的每一个是自由曲面透镜(即,具有自由形状(多项式)表面的透镜)。如上所述,在根据本公开的实施方式的某些示例中,第一透镜组g1的第二自由曲面透镜l1b的形状被选择为具有与透镜系统的第一自由曲面透镜相同的形状,但绕z轴与第一自由曲面透镜l1a对向(旋转180度)布置。第二透镜组包括多个非球面(旋转对称)透镜。
[0139]
表1示出了本公开的数值示例1的透镜系统400的透镜的基本透镜数据。在本实例中,由xy多项式定义(自由曲面透镜的)透镜表面1至4。透镜表面6至15中的每一个是非球面(而16和17表面是球面)。在第二透镜组g2中还设置有孔径光阑st。
[0140][0141][0142]
表1用于本公开的数字示例1的透镜的基本透镜数据。
[0143]
现在,如上所述,图4a示出了处于长焦状态的透镜系统400。相反,图4b示出了广角状态下的透镜系统400。从透镜系统400在广角状态和长焦状态之间的相对移动可以看出,第一透镜组(g1)的透镜能沿y轴(其垂直于透镜系统400的光轴(z轴)的轴)移动。相反,第二透镜组(g2)能沿透镜系统的z轴移动。
[0144]
在这方面,根据透镜系统的焦距的变化,透镜数据的变化在本公开的
[0145]
表2中示出。
[0146][0147]
表2:对于本公开的数值示例1,透镜数据随焦距的变化。
[0148]
如本发明的图5a和5b所示(在x-z平面中观察),第一透镜组的第一透镜l1a和第二透镜l1b的y位置的改变导致沿透镜系统的光轴(z轴)呈现的透镜(第一透镜l1a和第二透镜l1b的)形状的改变。形状的这种变化改变了第一透镜组的第一透镜和第二透镜的组合折射能力,导致透镜系统的焦距的变化。
[0149]
相反,提供第二透镜组沿x轴的移动是为了补偿当从广角状态改变到长焦状态时透镜系统400的折射能力的变化,以便将图像平面保持在沿透镜系统的光轴的固定位置。
[0150]
在该示例中,第一透镜组g1的第一透镜和第二透镜的平滑变化的自由曲面由xy多项式描述(参见本公开的等式1)。在本公开的表3中提供了该具体示例中的xy多项式的系数的值。
[0151]
[0152][0153]
表3:本公开的数值示例1的第一自由曲面透镜和第二自由曲面透镜的xy多项式系数的值。
[0154]
此外,如上所述,在该具体示例(数值示例1)中,透镜系统500的透镜表面6至15是非球面。在此示例中,这些非球面由本公开的等式3定义。因此,本公开的表4提供这些透镜的非球面系数的数值。
[0155]
[0156][0157]
表4:本公开的数值示例1的第一自由曲面透镜和第二自由曲面透镜的xy多项式系数的值。
[0158]
图6a示出了该示例的透镜系统400在最大长焦状态下的畸变。然而,图6b示出了该示例的透镜系统400在最大广角状态下的畸变。
[0159]
图7a和7b分别显示了最大长焦状态和广角状态下的光斑图,刻度为0.04毫米。相比之下,图8a和8b分别显示了最大长焦状态和广角状态下的光斑图,刻度为0.03毫米。
[0160]
从这些图中可以看出,该数字示例的透镜系统400在广角和长焦状态下都实现了良好的成像性能。
[0161]
此外,本示例的透镜系统400对于本公开的等式(4)至(11)的条件表达式实现以下值:
[0162][0163][0164][0165][0166][0167][0168]
|δla|/ft=0.536
[0169]
|δlb|/ft=0.48
[0170]
这些值中的每一个都在各自的条件表达式的范围内,因此确保了透镜系统400的成像性能。
[0171]
《数值示例2》
[0172]
图9a和9b示出了在y-z平面中示出的根据本公开实施方式的透镜系统500的示例配置。在这个例子中,z轴被定义为沿着透镜系统的光轴的轴。y轴被定义为垂直于该轴的轴(并且是自由透镜沿其移动以改变透镜系统焦距的轴)。x轴是同时垂直于z轴和y轴的轴。
[0173]
图9a示出了处于长焦状态的透镜系统500,图9b示出了处于广角透镜状态的透镜系统500。
[0174]
图10a和10b分别示出了与图9a和9b所示的相同的长焦透镜状态和广角透镜状态下的x-z平面中的透镜系统500。
[0175]
在透镜系统500中,示出了第一透镜组g1和第二透镜组g2。第一透镜组g1包括第一透镜l1a和第二透镜l2b。第一透镜l1a和第二透镜l1b中的每一个是自由曲面透镜(即,具有自由形状(多项式)曲面的透镜)。如上所述,根据本发明的实施方式,第一透镜组g1的第二自由曲面透镜l1b的形状被选择为具有与透镜系统的第一自由曲面透镜相同的形状,但被绕z轴与第一自由曲面透镜l1a对向(旋转180度)布置。第二透镜组包括多个非球面透镜。
[0176]
表5示出了本公开的数值示例2的透镜系统500的基本透镜数据。在该示例中,由fringe zernik多项式定义(自由曲面透镜的)透镜表面1至4。透镜表面6至15中的每一个都是非球面(而16和17表面是球面)。在第二透镜组g2中还设置有光圈光阑st。
[0177]
[0178][0179]
表5:本公开的数字示例2的基本透镜数据。
[0180]
现在,如上所述,图9a示出了处于长焦状态的透镜系统500。相反,图9b示出了广角状态下的透镜系统500。从透镜系统500在广角状态和长焦状态之间的相对移动可以看出,第一透镜组(g1)的透镜能沿y轴(垂直于透镜系统500的光轴(z轴))移动。相反,第二透镜组(g2)能沿透镜系统的z轴移动。
[0181]
在这方面,根据透镜系统的焦距的变化,透镜数据的变化在本公开的表6中示出。
[0182][0183][0184]
表6:对于本公开的数值示例2,透镜数据随焦距的变化。
[0185]
如本发明的图10a和10b所示(在x-z平面中观察),第一透镜组的第一透镜l1a和第二透镜l1b的y位置的改变导致沿透镜系统的光轴(z轴)呈现的透镜形状的改变。形状的这种变化改变了第一透镜组的第一透镜和第二透镜的组合折射能力,导致透镜系统的焦距的
变化。
[0186]
相反,提供第二透镜组沿x轴的移动是为了补偿当从广角状态改变到长焦状态时透镜系统500的折射能力的变化,以便将图像平面保持在沿透镜系统的光轴的固定位置。
[0187]
在该示例中,第一透镜组g1的第一透镜和第二透镜的平滑变化的自由曲面由fringe zernik多项式描述(参见本公开的等式2)。在本公开的表7中提供了该具体示例中的fringe zernik多项式的系数的值。
[0188][0189][0190]
表7:本公开的数值示例2的第一自由曲面透镜和第二自由曲面透镜的fringe zernik多项式系数的值。
[0191]
如上所述,在该具体示例中,透镜表面6至15是非球面。在这个例子中,这些表面由
本公开的等式3定义。因此,在本公开的表8中提供了这些透镜的非球面系数的数值。
[0192]
[0193][0194][0195]
表8:本公开的数值示例2的第二透镜组的透镜的非球面系数值。
[0196]
图11a示出了该示例的透镜系统500在最大长焦状态下的畸变。然而,图11b示出了该示例的透镜系统500在最大广角状态下的畸变。
[0197]
图12a和12b分别显示了最大长焦和最大广角状态下的光斑图,刻度为0.05毫米。
[0198]
从这些图中可以看出,该数字示例的透镜系统500在广角和长焦状态下都实现了良好的成像性能。
[0199]
此外,对于本公开的上述认定的条件表达式(4)至(11)的透镜系统500的值如下:
[0200][0201][0202][0203][0204][0205][0206]
|δla|/ft=0.652
[0207]
|δlb|/ft=0.635
[0208]
这些值中的每一个都在各自的条件表达式的范围内,因此确保了透镜系统500的成像性能。
[0209]
透镜系统的进一步应用:
[0210]
根据本公开的技术可应用于各种示例产品、装置和/或情况。例如,根据本公开的技术可应用于诸如汽车、电动汽车、混合动力汽车、摩托车、自行车、个人移动车辆、飞机、无人机、船舶、机器人、建筑机械、农业机械(例如拖拉机)等产品。在这些情况下,透镜系统100可以安装在这些车辆的车身上。
[0211]
图13是示出车辆控制系统7000的示意性配置示例的框图,车辆控制系统7000是可以应用根据本公开的技术的移动控制系统的示例。车辆控制系统7000包括经由通信网络7010连接的多个电子控制单元。在图13所示的示例中,车辆控制系统7000包括驱动系统控制单元7100、车身系统控制单元7200、电池控制单元7300、外部信息检测单元7400、车内信息检测单元7500和集成控制单元7600。连接多个控制单元的通信网络7010例如为can(controller area network,控制器局域网)、lin(local interconnect network,本地互连网络)、lan(local area network,局域网)或flexray(注册商标)等任意标准。它可以是一个车载通信网络。
[0212]
每个控制单元包括:根据各种程序执行算术处理的微型计算机;存储由微型计算机执行的程序或在各种算术操作中使用的参数的存储单元;以及驱动要被控制的设备的驱动电路。每个控制单元配备有网络i/f,用于经由通信网络7010和通过与车辆内部或外部的设备或传感器的有线通信或无线通信与其他控制单元通信。
[0213]
在图13中,作为集成控制单元7600的功能配置,示出了微型计算机7610、通用通信i/f 7620、专用通信i/f 7630、定位单元7640、信标接收单元7650、车载设备i/f 7660、音频图像输出单元7670、车载网络i/f 7680和存储单元7690。其它控制单元还包括微型计算机、通信i/f、存储单元等。
[0214]
驱动系统控制单元7100根据各种程序控制与车辆的驱动系统相关的设备的操作。例如,驱动系统控制单元7100包括用于产生诸如内燃机或驱动电动机的车辆的驱动力的驱动力产生装置、用于将驱动力传递到车轮的驱动力传递机构和车辆的转向角。它起到控制机构的作用,例如调节的转向机构和产生车辆制动力的制动装置。驱动系统控制单元7100可以具有作为诸如abs(antilock brake system,防抱死制动系统)或esc(electronic stability control,电子稳定控制)的控制装置的功能。
[0215]
车辆状态检测单元7110连接到驱动系统控制单元7100。车辆状态检测单元7110可以是例如检测车身的轴向旋转运动的角速度的陀螺仪传感器或检测车辆的加速度或加速踏板的操作量、制动踏板的操作量和方向盘的转向的加速度传感器。包括用于检测角度、发动机速度、车轮转速等的传感器中的至少一个。驱动系统控制单元7100使用从车辆状态检测单元7110输入的信号执行算术处理,以控制内燃机、驱动电动机、电动助力转向装置、制动装置等。
[0216]
车身系统控制单元7200根据各种程序控制配备在车身上的各种装置的操作。例如,车身控制单元7200用作无钥匙进入系统、智能钥匙系统、电动车窗设备或各种灯的控制设备,例如前照灯、后照灯、制动灯、闪烁灯或雾灯。在这种情况下,车身系统控制单元7200可以接收从替代钥匙的便携式设备发送的无线电波或各种开关的信号。车身系统控制单元7200接收这些无线电波或信号的输入,并控制车辆的门锁装置、电动车窗装置、灯等。
[0217]
电池控制单元7300根据各种程序控制作为驱动电机的电源的二次电池7310。例如,从设置有二次电池7310的电池装置向电池控制单元7300输入诸如电池温度、电池输出电压或电池的剩余容量的信息。电池控制单元7300使用这些信号执行算术处理,并执行二次电池7310的温度调节控制或设置在电池装置中的冷却装置等的控制。
[0218]
车外信息检测单元7400检测车外信息,车辆配备有车辆控制系统7000。例如,成像单元7410和外部信息检测单元7420中的至少一个连接到外部信息检测单元7400。成像单元7410至少包括飞行时间(tof)相机、立体相机、单目相机、红外相机和其他相机中的一个。例如,环境传感器用于检测装备有车辆控制系统7000的车辆周围的天气或其他车辆、障碍物或行人,这些信息例如可在车外信息检测单元7420中检测。
[0219]
环境传感器可以是例如检测潮湿天气的雨滴传感器、检测烟雾的烟雾传感器、检测日照强度的日照传感器和检测降雪的雪传感器中的至少一个。环境信息检测传感器可以是超声波传感器、雷达设备和光检测和测距(lidar)设备中的至少一个。成像单元7410和外部信息检测单元7420可以作为独立的传感器或设备提供,或者可以作为多个传感器或设备的集成设备提供。
[0220]
现参照图14,示出了成像单元7410和外部信息检测单元7420在车辆上的安装位置的示例。成像单元7910、7912、7914、7916、7918例如设置在车辆7900的前鼻部、侧镜、后保险杠、后门和车辆内部的挡风玻璃的上部中的至少一处。设置在前鼻部的成像单元7910和设置在车舱内的挡风玻璃上部的成像单元7918主要获取车辆7900前方的图像。设置在侧镜中的成像单元7912和7914主要获取车辆7900的侧面的图像。设置在后保险杠或后门中的成像单元7916主要获取车辆7900后面的图像。设置在乘客舱内挡风玻璃上部的成像单元7918主要用于检测引导车辆或行人、障碍物、交通灯、交通标志、车道等。
[0221]
注意,图14示出了成像单元7910、7912、7914和7916中的每一个的成像范围的示
例。图14的成像范围表示设置在前鼻上的成像单元7910的成像范围,图14的成像范围b和c表示设置在侧视镜上的成像单元7912和7914的成像范围,图14的成像范围d表示设置在后保险杠或后门中的成像部分7916的成像范围。例如,通过叠加由成像单元7910、7912、7914和7916拍摄的图像数据,可以获得从上方观看的车辆7900的鸟瞰视图。设置在车辆7900的前部、后部、侧面和来向以及车辆内部的挡风玻璃上方的外部信息检测单元7920、7922、7924、7926、7928和7930可以是例如超声波传感器或雷达装置。设置在车辆7900的前鼻部、后保险杠、后门和车辆内部的挡风玻璃的上部上的外部信息检测单元7920、7926、7930可以是例如激光雷达装置。这些车外信息检测单元7920至7930主要用于检测前车、行人、障碍物等。
[0222]
现在回到图13,继续描述车辆控制系统7000。车外信息检测单元7400使成像单元7410捕获车外的图像,并接收捕获的图像数据。此外,外部信息检测单元7400从连接的外部信息检测单元7420接收检测信息。当车外信息检测单元7420是超声波传感器、雷达设备或激光雷达设备时,车外信息检测单元7400发射超声波或电磁波,并接收关于接收的反射波的信息。外部信息检测单元7400可以基于接收到的信息执行人、车、障碍物、标志、路面上的字符等的对象检测处理或距离检测处理。外部信息检测单元7400可以基于接收到的信息执行用于识别降雨、烟雾、路面状况等的环境识别处理。外部信息检测单元7400可以基于接收到的信息来计算到车辆外部对象的距离。
[0223]
此外,外部信息检测单元7400可以基于接收到的图像数据执行用于识别人、车、障碍物、标志、路面上的字符等的图像识别处理或距离检测处理。外部信息检测单元7400对接收的图像数据执行诸如失真校正或对齐的处理,并组合由不同成像单元7410拍摄的图像数据以生成俯视图像或全景图像。外部信息检测单元7400可以使用由不同成像单元7410捕获的图像数据来执行视点转换处理。
[0224]
车载信息检测单元7500检测车辆内部的信息。例如,检测驾驶员的状态的驾驶员状态检测单元7510连接到车内信息检测单元7500。驾驶员状态检测单元7510可以包括用于对驾驶员进行成像的照相机、用于检测驾驶员的生物信息的生物测定传感器、用于收集车辆内部的声音的麦克风等。生物传感器例如设置在座椅或方向盘上,并检测坐在座椅上的乘员或握住方向盘的驾驶员的生物信息。车内信息检测单元7500可以基于从驾驶员状态检测单元7510输入的检测信息来计算驾驶员的疲劳程度或集中程度,或者确定驾驶员是否没有进入睡眠状态。车载信息检测单元7500可以对所收集的音频信号执行诸如噪声消除处理的处理。
[0225]
集成控制单元7600根据各种程序控制车辆控制系统7000中的整体操作。输入单元7800连接到集成控制单元7600。输入单元7800例如由诸如触摸面板、按钮、麦克风、开关或操纵杆之类的设备实现,这些设备可以由乘客操作输入。集成控制单元7600可以接收通过对由麦克风输入的语音进行语音识别而获得的数据。输入单元7800可以是例如使用红外线或其他无线电波的远程控制设备,或者与车辆控制系统7000的操作相对应的诸如移动电话或pda(personal digital assistant,个人数字助理)的外部连接设备。输入单元7800可以是例如照相机,在这种情况下,乘客可以通过手势输入信息。或者,可以输入通过检测乘客佩戴的可穿戴设备的移动而获得的数据。
[0226]
此外,输入单元7800可以包括例如输入控制电路,其基于乘客等使用上述输入单
元7800输入的信息生成输入信号,并将生成的信号输出到集成控制单元7600。乘客等操作输入单元7800以将各种数据输入到车辆控制系统7000并指示处理操作。
[0227]
存储单元7690可以包括存储由微计算机执行的各种程序的rom(只读存储器)和存储各种参数、计算结果、传感器值等的ram(随机存取存储器)。此外,存储单元7690可以由诸如硬盘驱动器(hdd)、半导体存储设备、光存储设备、磁光存储设备等的磁存储设备实现。
[0228]
通用通信i/f 7620是中介与外部环境7750中存在的各种设备的通信的通用通信i/f。通用通信i/f 7620是诸如gsm(注册商标)(global system of mobile communications,全球移动通信系统)、wimax(注册商标)、lte(注册商标)(长期演进技术)或lte-a(lte-advanced,长期演进技术的演进)的蜂窝通信协议。或者,可以实现诸如无线lan(也称为wi-fi(注册商标))、蓝牙(注册商标)等的其他无线通信协议。通用通信i/f 7620经由基站或接入点连接到例如存在于外部网络(例如,因特网、云网络或运营商专用网络)上的设备(例如,应用服务器或控制服务器)。通用通信i/f 7620是使用例如p2p(peer to peer)技术存在于车辆附近的终端(例如,驾驶员、行人或商店终端,或者mtc(machine type communication,机器类型通信)终端)。它可以与专用通信i/f 7630连接,专用通信i/f 7630是支持为在车辆中使用而设计的通信协议的通信i/f。专用通信i/f 7630可以是诸如wave(wireless access in vehicle environment,车辆环境中的无线接入)、dsrc(dedicated short range communications,专用短程通信)或蜂窝通信协议的标准协议,例如,蜂窝通信协议是下层ieee 802.1lp和上层ieee 1609的组合。专用通信i/f7630通常用于车辆到车辆通信、车辆到基础设施通信、车辆到家庭通信以及车辆到行人。执行v2x(车辆到多端)通信,这个概念包括一个或多个通信。
[0229]
定位单元7640从例如gnss信号(global navigation satellite system,全球导航卫星系统)卫星接收gnss信号(例如,来自全球定位系统(global positioning system,gps)卫星的gps信号)并执行定位,从而执行车辆的纬度、经度和高度。生成位置信息,包括定位单元7640可以通过与无线接入点交换信号来指定当前位置,或者可以从诸如具有定位功能的移动电话、智能手机等的终端获取位置信息。
[0230]
信标接收单元7650接收例如从安装在道路上的无线电台等发送的无线电波或电磁波,并获取诸如当前位置、交通堵塞、关闭时间或所需时间的信息。信标接收单元7650的功能可以包括在上述专用通信i/f 7630中。
[0231]
车载设备i/f 7660是协调微型计算机7610和存在于车辆中的各种车载设备7760之间的连接的通信接口。车内设备i/f 7660可以使用无线通信协议建立无线连接,例如无线lan、蓝牙(注册商标)、nfc(near field communication,近场通信)或wusb(无线usb)。此外,通过usb(universal serial bus,通用串行总线)、hdmi(high-definition multimedia interface,高清晰度多媒体接口)或mhl(移动)经由连接端子(未示出)(以及如果需要的话,电缆)连接车载设备i/f 7660,可以建立诸如高清晰度链路的有线连接。车载设备7760可以包括,例如,乘客拥有的移动设备或可穿戴设备,或者携带在车辆中或附接到车辆上的信息设备中的至少一个。此外,车载设备7760可以包括用于执行到任何目的地的路线搜索的导航设备。
[0232]
车载设备i/f 7660与这些车载设备7760交换控制信号或数据信号。车载网络i/f 7680是介于微计算机7610和通信网络7010之间的通信的接口。车载网络i/f 7680根据通信
网络7010支持的预定协议发送和接收信号等。
[0233]
集成控制单元7600的微计算机7610经由通用通信i/f 7620、专用通信i/f 7630、定位单元7640、信标接收单元7650、车载设备i/f 7660和车载网络i/f 7680中的至少一个连接。车辆控制系统7000基于所获得的信息根据各种程序进行控制。例如,微计算机7610基于获取的车辆内外信息计算驱动力产生装置、转向机构或制动装置的控制目标值,并向驾驶系统控制单元7100输出控制命令。例如,微型计算机7610实现adas(advanced driver assistance system,高级驾驶员辅助系统)的功能,包括车辆的碰撞避免或振动减轻、基于车辆间距离的跟随行驶、车辆速度保持行驶、车辆碰撞警告、车辆车道偏离警告等。此外,微计算机7610根据所获取的车辆周围的信息,通过控制驱动力产生装置、转向机构、制动装置等,在不使用驾驶员的操作的情况下自动行驶。例如,为了驱动的目的,可以执行协调控制。
[0234]
微计算机7610具有通过通用通信i/f 7620、专用通信i/f 7630、定位单元7640、信标接收单元7650、车载设备i/f 7660和车载网络i/f 7680中的至少一个获取的信息。基于上述,可以生成车辆与诸如周围结构或人之类的对象之间的三维距离信息,并且可以创建包括车辆当前位置的周边信息的局部地图信息。此外,微计算机7610可以基于所获取的信息来预测诸如接近道路等的车辆或行人等的碰撞等危险,并且可以生成用于警告的信号。警告信号可以是例如用于产生警告声音或点亮警告灯的信号。
[0235]
音频图像输出单元7670将音频和图像中的至少一个的输出信号发送到能够以视觉或听觉向乘客或车辆外部通知信息的输出设备。在图13的示例中,示出了音频扬声器7710、显示单元7720和仪表板7730作为输出设备。显示单元7720可以包括例如车载显示器和抬头显示器(head-up display)中的至少一个。显示部分7720可以具有ar(augmented reality,增强现实)显示功能。输出设备可以是除这些设备之外的其他设备,例如耳机、可穿戴设备,例如乘客佩戴的眼镜型显示器、投影仪或灯。当输出设备是显示设备时,显示设备可以获得从微计算机7610执行的各种处理中获得的或者从另一控制单元接收的信息,为诸如文本、图像、表格、图形等各种格式。然后由显示设备可视地显示该信息。
[0236]
当输出设备是音频输出设备时,音频输出设备将由音频数据或再现的音频数据组成的音频信号转换成模拟信号,并以听觉方式输出。
[0237]
在图13所示的示例中,经由通信网络7010连接的至少两个控制单元可以集成为一个控制单元。或者,每个控制单元可以由多个控制单元配置。此外,车辆控制系统7000可包括另一未示出的控制单元。在上面的描述中,任何控制单元的部分或全部功能可以提供给另一个控制单元。也就是说,只要经由通信网络7010执行信息的发送和接收,就可以由任何控制单元执行预定的算术处理。类似地,当连接到任何控制单元的传感器或设备连接到另一控制单元时,多个控制单元可以经由通信网络7010相互发送和接收检测信息。
[0238]
在上述车辆控制系统7000中,参照本公开的图13和图14,本公开的可变焦距透镜系统100和成像装置300可以应用于成像单元7410和成像单元7910、7912、7914、7916、7918。
[0239]
方法:
[0240]
图15示出了根据本公开的实施方式的控制透镜系统的方法。该方法可应用于诸如参照本公开的图1描述的透镜系统100的透镜系统。
[0241]
该方法从步骤s1500开始并进行到步骤s1502。
[0242]
在步骤s1502中,该方法包括控制第一透镜组的一对透镜中的第一透镜(例如透镜
102a)沿垂直于透镜系统的光轴z的透镜系统的y轴的移动,并根据一对透镜中的第一透镜沿y轴的移动,控制第一透镜组的一对透镜中的第二透镜(例如透镜102b)沿y轴在与一对透镜中的第一透镜的相反方向的移动,以改变所述透镜系统的折射能力。
[0243]
一旦该对透镜中的第一透镜和第二透镜的移动已经移动,该方法进行到步骤s1504。
[0244]
在步骤s1504中,方法包括根据一对透镜沿y轴的移动来控制第二透镜组沿透镜系统的光轴z的移动,以保持透镜系统的图像位置。
[0245]
在一些示例中,将理解,方法的步骤s1504可在方法步骤s1502之前执行。替代性地,方法步骤s1502和s1504可以并行地或基本上同时地执行。
[0246]
一旦执行了s1305,该方法可以返回到s1500或步骤s1502。或者,如果不希望透镜系统进一步移动,则该方法将进行到方法步骤s1506,并以方法步骤s1506结束。
[0247]
此外,本公开的技术特征和各方面可进一步按照以下编号的条款安排:
[0248]
1.一种用于成像装置的透镜系统,所述透镜系统包括:
[0249]
第一透镜组,具有沿所述透镜系统的光轴z的固定位置,所述第一透镜组包括一对透镜,所述一对透镜中的每一者具有至少一个是自由曲面的透镜表面,所述一对透镜能被配置为沿所述透镜系统的所述光轴z至少部分重叠,所述一对透镜中的每一个透镜具有相同的形状并沿所述透镜系统的所述光轴z相对于彼此对向旋转;以及
[0250]
第二透镜组,沿所述透镜系统的所述光轴z布置,所述第二透镜组包括多个旋转对称的透镜;
[0251]
其中,所述第一透镜组的所述一对透镜中的第一透镜被配置为能沿所述透镜系统的y轴移动,其中,所述透镜系统的y轴垂直于所述透镜系统的所述光轴z,并且所述第一透镜组的所述一对透镜中的第二透镜被配置为能根据所述一对透镜中的所述第一透镜的移动,沿所述y轴在与所述一对透镜中的所述第一透镜相反的方向上移动,以改变所述透镜系统的折射能力;
[0252]
并且其中,所述第二透镜组被配置为能根据所述一对透镜沿所述y轴的移动,沿所述透镜系统的所述光轴z移动,以保持所述透镜系统的图像位置。
[0253]
2.根据条款2所述的透镜系统,其中所述透镜系统满足以下条件:
[0254][0255]
其中,为所述透镜系统的最大广角状态下所述第一透镜组的所述一对透镜的组合轴向折射能力,fw为所述最大广角状态下的所述透镜系统的焦距。
[0256]
3.根据前述任一条款所述的透镜系统,其中所述透镜系统满足以下条件:
[0257][0258]
其中,为所述透镜系统的最大长焦状态下所述第一透镜组的所述一对透镜的组合轴向折射能力,ft为所述最大长焦状态下的所述透镜系统的焦距。
[0259]
4.根据前述任一条款所述的透镜系统,其中所述透镜系统满足以下条件:
[0260]
[0261][0262]
其中,是在所述透镜系统的最大广角状态下,所述第一透镜组的所述一对透镜沿所述透镜系统的x轴的组合轴向折射能力,其中,所述透镜系统的x轴垂直于所述透镜系统的所述y轴以及所述光轴z;是在所述最大广角状态下,所述第一透镜组的所述一对透镜沿所述y轴的组合轴向折射能力;是在所述透镜系统的最大长焦状态下,所述第一透镜组的所述一对透镜沿所述x轴的组合轴向折射能力;是在所述透镜系统的最大长焦状态下,所述第一透镜组的所述一对透镜沿所述y轴的组合轴向折射能力;fw是在所述最大广角状态下的所述透镜系统的焦距;ft是在所述最大长焦状态下的所述透镜系统的焦距。
[0263]
5.根据前述任一条款所述的透镜系统,其中所述透镜系统满足以下条件:
[0264][0265][0266]
其中,是在所述透镜系统的最大广角状态下,所述第一透镜组的所述一对透镜沿所述透镜系统的x轴的组合轴向折射能力,其中,所述透镜系统的x轴垂直于所述透镜系统的所述y轴和所述光轴z;是在所述最大广角状态下的所述第一透镜组的所述一对透镜沿所述y轴的组合轴向折射能力;是在所述透镜系统的最大长焦状态下,所述第一透镜组的所述一对透镜沿所述x轴的组合轴向折射能力;是在所述透镜系统的最大长焦状态下,所述第一透镜组的所述一对透镜沿所述y轴的组合轴向折射能力。
[0267]
6.根据前述任一条款所述的透镜系统,其中所述透镜系统满足以下条件:
[0268]
0.2<|δla|/ft<0.85
[0269]
0.2<|δlb|/ft<0.85
[0270]
其中,δla是当所述透镜系统从最大广角状态改变到最大长焦状态时,所述第一透镜组的所述一对透镜中的所述第一透镜沿所述y轴的移动,δlb是当所述透镜系统从所述最大广角状态改变到所述最大长焦状态时,所述第一透镜组的所述一对透镜中的所述第二透镜沿所述y轴的移动,ft是在所述最大长焦状态下的所述透镜系统的焦距。
[0271]
7.根据前述任一项所述的透镜系统,其中,所述第一透镜组的所述一对透镜中的所述第一透镜沿所述y轴移动的幅度与所述第一透镜组的所述一对透镜中的所述第二透镜沿所述y轴移动的幅度相同。
[0272]
8.根据前述任一项所述的透镜系统,其中,所述第一透镜组的所述一对透镜中的所述第一透镜和所述第二透镜的形状在所述透镜系统的y轴和光轴z形成的平面内对称。
[0273]
9.一种成像装置,所述成像装置包括:
[0274]
根据前述任一条款所述的透镜系统;以及
[0275]
图像捕获单元。
[0276]
10.根据条款9所述的透镜系统,其中所述透镜系统还包括布置在所述透镜系统和
所述成像装置之间的光学低通滤波器。
[0277]
11.一种控制用于成像装置的透镜系统的方法,所述透镜系统包括:
[0278]
第一透镜组,具有沿所述透镜系统的光轴z的固定位置,所述第一透镜组包括一对透镜,所述一对透镜中的每一者具有至少一个是自由曲面的透镜表面,所述一对透镜能被配置为沿所述透镜系统的所述光轴z至少部分重叠,所述一对透镜中的每一个透镜具有相同的形状并沿所述透镜系统的所述光轴z相对于彼此对向旋转;以及
[0279]
第二透镜组,沿所述透镜系统的所述光轴z布置,所述第二透镜组包括多个旋转对称的透镜;
[0280]
其中,所述方法包括:
[0281]
控制所述第一透镜组的所述一对透镜中的第一透镜沿所述透镜系统的y轴移动,其中,所述透镜系统的y轴垂直于所述透镜系统的所述光轴z,并且根据所述一对透镜中的所述第一透镜沿所述y轴的移动,控制所述第一透镜组的所述一对透镜中的第二透镜沿所述y轴在与所述一对透镜中的所述第一透镜相反的方向上的移动,以改变所述透镜系统的折射能力;以及
[0282]
根据所述一对透镜沿所述y轴的移动,控制所述第二透镜组沿所述透镜系统的所述光轴z的移动,以保持所述透镜系统的图像位置。
[0283]
12.一种包括指令的计算机程序产品,当计算机执行该程序时,该指令使计算机执行控制用于成像装置的透镜系统的方法,所述透镜系统包括:
[0284]
第一透镜组,具有沿所述透镜系统的光轴z的固定位置,所述第一透镜组包括一对透镜,所述一对透镜中的每一者具有至少一个是自由曲面的透镜表面,所述一对透镜能被配置为沿所述透镜系统的所述光轴z至少部分重叠,所述一对透镜中的每一个透镜具有相同的形状并沿所述透镜系统的所述光轴z相对于彼此对向旋转;以及
[0285]
第二透镜组,沿所述透镜系统的所述光轴z布置,所述第二透镜组包括多个旋转对称的透镜;
[0286]
其中,所述方法包括:
[0287]
控制所述第一透镜组的所述一对透镜中的第一透镜沿所述透镜系统的y轴移动,其中,所述透镜系统的y轴垂直于所述透镜系统的所述光轴z,并且根据所述一对透镜中的所述第一透镜沿所述y轴的移动,控制所述第一透镜组的所述一对透镜中的第二透镜沿所述y轴在与所述一对透镜中的所述第一透镜相反的方向上的移动,以改变所述透镜系统的折射能力;以及
[0288]
根据所述一对透镜沿所述y轴的移动,控制所述第二透镜组沿所述透镜系统的所述光轴z的移动,以保持所述透镜系统的图像位置。
[0289]
显然,根据上述教导,本公开的许多修改和变化是可能的。因此,应当理解,在所附权利要求的范围内,本公开内容可以以不同于本文具体描述的方式实施。
[0290]
只要本公开的实施方式被描述为至少部分地由软件控制的数据处理设备来实现,就会理解,携带这种软件的非短暂机器可读介质,例如光盘、磁盘、半导体存储器等,也被认为代表本公开的实施方式。
[0291]
将理解,为了清楚起见,上述描述参考不同的功能单元、电路和/或处理器描述了实施方式。然而,明显的是,在不偏离上述实施方式的情况下,可以使用不同功能单元、电路
和/或处理器之间的任何适当的功能分配。
[0292]
所描述的实施方式可以任何合适的形式来实现,包括硬件、软件、固件或这些的任何组合。所描述的实施方式可选地至少部分地实现为运行在一个或多个数据处理器和/或数字信号处理器上的计算机软件。
[0293]
任何实施方式的元件和组件可以以任何合适的方式在物理上、功能上和逻辑上实现。实际上,该功能可以在单个单元中、在多个单元中或作为其他功能单元的一部分来实现。因此,所公开的实施方式可以在单个单元中实现,或者可以在物理上和功能上分布在不同单元、电路和/或处理器之间。
[0294]
尽管已经结合一些实施方式描述了本公开,但本公开并不旨在限于在此阐述的特定形式。此外,尽管可以结合特定实施方式来描述特征,但本领域技术人员将认识到,可以以适合于实现该技术的任何方式组合所描述的实施方式的各种特征。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。