1.本实用新型涉及食品加工技术领域,具体涉及一种馄饨捏合装置。
背景技术:
2.食品工厂制作的速冻馄饨采用机械化加工能够有效提高生产效率,降低制作成本,提高产量。在馄饨的制作工序中,捏合工序直接决定了馄饨的成型形状,因此至关重要。
3.授权公告号为210248150u名称为一种馄饨成型装置的中国专利,及授权公告号为cn213281309u名称为馄饨捏合装置的中国专利,都记载了采用两个成型爪配合进行捏合,但是两个成型爪在对馅皮捏合时会在捏合点形成面团,不仅影响美观,还对口感造成了一定的影响。
4.针对上述问题,公布号为cn113080215a的中国专利记载了一种元宝馄饨成型方法,该方法利用独立驱动的左、右成型爪捏合成型馄饨,成型爪捏合馅皮时成型区域部分层叠设置,并带动馅皮层叠设置,使得馄饨成型外观美观,避免了在捏合处产生面皮团。但是其捏合程序复杂,设备要求高,需要停顿等协作过程,一旦出现偏差极难调整,停工时间长不能满足高强度的生产需求。为达到捏合位置的层叠效果还有一部分设计,在原有直接驱动方式的情况下,通过调整两个成型爪初始位置的不同,达到层叠捏合的目的,但是上述方法会造成捏合后的馄饨外围翻边不一致,对外观影响极大,产品得不到市场的认可,所以现在还没有一种让人满意的机械加工馄饨捏合方法。
5.而且利用成型爪捏合馄饨还存在成型爪对馅皮局部拉扯严重,面皮易破损,不合格产品率高的问题。
技术实现要素:
6.本实用新型提供一种馄饨捏合装置,该装置降低成型爪对馅皮的磨损,保证馅皮完好,减少成型过程中的馅皮破损率,同时利用更为简单的方式实现层叠仿手工捏合,简化了捏合程序设置及设备复杂度,提高工业性,并且保证了成型馄饨的美观。
7.本实用新型的技术方案是:一种馄饨捏合设备,包括相互配合的第一成型爪和第二成型爪,所述第一成型爪和第二成型爪各自包括弧状板、设置在弧状板一侧上部的连接部、转轴,所述连接部偏离转轴轴心安装在转轴上。
8.在捏合状态时,所述第一成型爪、第二成型爪的弧状板前端部分层叠。
9.还包括用于驱动转轴旋转的步进电机。
10.还包括一个齿轮齿条传动副连接步进电机与转轴,步进电机驱动齿条往复运动,齿条驱动齿轮带动一个成型爪运动,同时两个成型爪通过齿轮啮合联动,形成一主动、一被动的开合配合。
11.还包括二个齿轮齿条传动副连接步进电机与转轴,步进电机驱动齿条往复运动,两个齿轮齿条副分别带动一个成型爪运动,两成型爪形成开合配合。
12.所述齿条齿轮传动副的齿轮套设在转轴上,转轴下部设置安装部,安装部与转轴
同轴设置,安装部底面设有直线安装槽,直线安装槽用于安装成型爪连接部,直线安装槽与安装部轴心的间距为1~8mm。
13.所述第一、第二成型爪与转轴轴心的偏离距离不同,以成型爪端部不发生碰撞为限。
14.所述弧状板的厚度由上至下递减。
15.所述弧状板由食品级塑料制成,或弧状板表面一体设置有特氟龙层。
16.两成型爪的转轴位于半成型馄饨的馅料区域上边界两侧角部,两成型爪偏心安装于转轴的同一侧,形成对称或近乎对称设置,且成型爪在初始位置时整体对应于半成型馄饨的面皮上。
17.本实用新型的馄饨捏合装置具有如下优点,1、将成型爪偏心设置在驱动转轴上,优点是偏心安装后,可以有效减少成型爪带动面皮转动过程中成型爪对面皮局部的拉扯,解决传统的安装方式会存在一个对应转轴的扭点,该处面皮极易在成型爪旋转过程中破损的问题,从而提高产品质量;2、还进一步巧妙的利用了前述偏心设置,对左、右成型爪的距离转轴轴线的偏心量进行差别设置,达到了两个成型爪形成交替捏合,且不发生碰撞,这样简化了交替捏合操作,无需进行特别停顿等捏合程序设置,从而简化了设备驱动结构,拓宽了驱动的形式,可以根据实际情况选择独立或联动驱动;3、偏心设置达成的捏合操作,还可以保证成型爪在捏合初始位置时保持对称位置或近乎对称的状态,从而保证捏合成型的馄饨翻边保持一致,保证馄饨的美观性。
18.本实用新型的设备,对半成型馄饨进行捏合,利用简单的方式实现馅皮的层叠捏合,可以适用大部分的传统驱动方式,无需过多的程序设置,并且保证了馄饨馅皮的折边美感及捏合部位的美感,实现了食品的快速稳定高质量生产。
附图说明
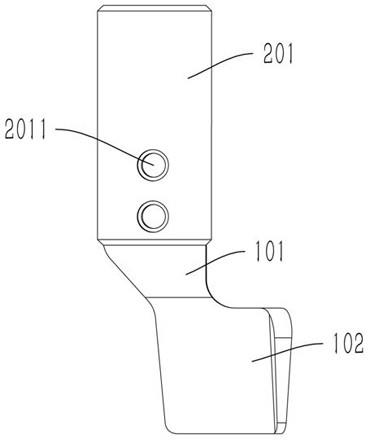
19.图1为本实用新型成型爪的主视图。
20.图2为本实用新型成型爪的右视图。
21.图3为本实用新型成型爪的立体图。
22.图4为本实用新型成型爪与转轴连接的主视图。
23.图5为本实用新型成型爪与转轴连接的立体图。
24.图6为本实用新型第一成型爪安装部的结构示意图。
25.图7为本实用新型第二成型爪安装部的结构示意图。
26.图8为本实用新型捏合设备实施例1的结构示意图。
27.图9为本实用新型捏合设备实施例2的结构示意图。
28.图10本实用新型捏合设备实施例3的结构示意图。
29.图中,连接部101,弧状板102,安装部201,第一安装部202,第二安装部203,紧固螺钉2011,左安装槽2012,右安装槽2013,第一齿轮421,第二齿轮422,齿条423,支撑杆425,下齿条426,上齿条427。
具体实施方式
30.本实用新型下述实施例中,步进电机以何种形式驱动齿轮齿条副往复运动均为现
有技术(例如本实施例1、2中采用了设有电机驱动的设有曲线槽的轮辊与摆杆413实现往复运动),下述实施例中不再赘述。同时需要说明的是本技术方案仅仅为捏合过程,捏合前后对成型爪的上提下降过程,及对半成型馄饨的输送等情形,均为现有技术,本实用新型都不做详细描述和说明。
31.实施例1
32.一种馄饨捏合设备,包括相互配合的第一成型爪、第二成型爪,参见图1至图3,成型爪,包括弧状板102、连接部101,弧状板102的厚度由上至下递减,当成型爪提起时,上面厚的部分会留出相对大一些的空间,稍微提起一点高度,成型爪即可和馄饨相分离,保证成型爪顺利抬起,避免发生粘连,提高效率。连接部101一体设置在弧状板102的一侧上部,成型爪的形状可以参考现有技术中的各种弧形爪,使用者根据实际情况制定形状的具体弧度、是否带有扩展连接部,扩展连接部的斜度、弧状板和连接部错开的距离都可以根据馄饨的成型形状进行调节。
33.参见图4至图7,转轴与成型爪连接,转轴下部设置安装部201,安装部201与转轴同轴设置,安装部201为圆柱形,底面偏离安装部201的轴心设有安装直线安装槽,其侧面设有紧固螺钉2011,成型爪的连接部101设置于安装槽内并通过紧固螺钉2011固定。除了上述安装方式外也可以采用焊接等固定连接方式。
34.安装部201和成型爪均食品级塑料或钢质制作,钢制的优选一体设置特氟龙层,更加有利于防止粘连。
35.第一成型爪、第二成型爪捏合时,两成型爪的弧状板前端部分层叠设置,形成交替捏合,同时为了保证两个成型爪交叠捏合不发生碰撞,成型爪在两个驱动组件上的偏心量(连接部101距离安装部201的轴心的距离)不同,参见图6和图7,具体的:第一成型爪转轴安装部的安装槽2012和第二成型爪转轴安装部的安装槽2013位于二者对应的安装部的中心的同一侧,第一成型爪安装部的中心线和其对应的安装槽2012之间的距离为第一偏心量,第二成型爪安装部的中心线和其对应的右安装槽2013之间的距离为第二偏心量,第一偏心量的值大于第二偏心量,在本实施例中第一偏心量约为5-8mm,第二偏心量约为1-4mm。
36.参见图8,驱动方式为步进电机、一个齿轮齿条传动副,齿条齿轮传动副包括若干第一齿轮422,齿条423,齿条与若干第二齿轮422配合,步进电机驱动齿条往复运动,第二齿轮422套设第二成型爪转轴上,第一成型爪上套设有第一齿轮421,第一、第二齿轮啮合,两个齿轮同步带动两个成型爪形成一主动、一被动的开合配合。
37.工作过程如下:各组成型爪下方对应位置带馅对折的馄饨面皮,成型爪下降压住馄饨,每组两个成型爪的相向转动,将折叠的馄饨皮两端层叠粘接在一起。
38.通过本实施例充分阐述了本实用新型捏合方法的核心思路,即巧妙的利用偏心设置转轴上的成型爪,缓解成型爪对面皮局部压点的拉扯,解决面皮破损的问题,同时继续利用偏心设置,深入进行结构设计,将两个成型爪的安装偏心量区别设置,达到了简化对面皮捏合部层叠设置的实现过程,可以无需复杂设置即可达到层叠捏合的目的,且在这个过程中保证了馄饨捏合后的翻边一致性,使得成型爪驱动方式更加的自由。
39.实施例2
40.本实施例的成型爪结构与实施例1一致,采用了单动力源,两成型爪各自驱动的驱动形式,为一个步进电机、二个齿轮齿条传动副,第一、第二成型爪分别使用一套齿轮齿条
传动副,具体的参照图9第二齿轮422高于第一齿轮421,二者相分离,在第一齿轮421对应的位置设置下齿条426,在第二齿轮422对应的位置设置上齿条427,每个齿条对应设置一套摆杆及曲线槽辊轮,实现往复运动,两套辊轮安装在同一个步进电机轴上。
41.实施例3
42.本实施例采用了双动力源,两成型爪各自驱动的驱动形式,为二个步进电机、二个电机驱动的丝杠,第一、第二成型爪分别使用一套独立步进电机驱动的丝杠414实现旋转,具体的参照图10,第二齿轮422高于第一齿轮421,二者相分离,在第一齿轮421对应的位置设置下第一丝杠426,在第二齿轮422对应的位置设置上第二丝杠427。在此种形式下,二成型爪与转轴的偏心量可以相同设置,仅利用偏心量防止面皮破损即可,通过独立驱动形成转速差,形成交替捏合即可。实施例1、2、3提供了三种形式的驱动方案都匹配本实用新型的捏合设备,体现了本实用新型捏合设备的高适用性和简便性。
43.上面结合附图和实施例对本实用新型作了详细的说明,但是,所属技术领域的技术人员能够理解,在不脱离本实用新型宗旨的前提下,还可以对上述实施例中的各个具体参数进行变更,形成多个具体的实施例,均为本实用新型的常见变化范围,在此不再一一详述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。