1.本实用新型涉及一种船舶供电设备,特别涉及一种可以自动识别船型、自动逃逸等功能的一体式智能岸电连接装置。
背景技术:
2.目前,岸电系统分为两种:一种是不可移动式的岸电系统,另外一种是可移动的电缆绞车。两者均可根据具体使用条件的不同进行选择并且都能实现船舶供电目的,但是现有的这两种设备由于其整体系统设计功能单一,自动化程度低,可替代性差,在使用过程中仍然需要大量的人力干预才能完成船舶靠港期间并离网,并且没有发生危险时设备自身的保护机制,其存在的主要问题如下:(1)岸电系统不能识别船型,需要手动配置电源供电参数,智能化水平不高。(2)岸电电源对船舶供电过程发生危险时连接器迅速脱离船舶几乎不可能。(3)岸电设备通用性不高、利用率低,不能应急给其他设备供电。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种能够自动识别船舶位置、船舶类型,出现险情能够自动逃逸,提高安全性以及具有波浪补偿功能的一体式智能岸电连接装置。
4.为了解决上述技术问题,本实用新型的一体式智能岸电连接装置,包括能够行走的运输平台以及运输平台上安置的具有高频电源及其控制电路的高频电源柜、具有波浪补偿平台控制系统的波浪补偿平台以及具有电缆绞盘控制系统电缆绞盘,波浪补偿平台上安装有用于与船舶供电端配合的机械臂,电缆绞盘上缠绕有供电电缆,供电电缆的一端通过前快速连接器与高频电源柜连接,供电电缆的另外一端通过后快速连接器与船舶供电端连接,后快速连接器安装在机械臂上。
5.所述运输平台上安置有系统控制箱,所述系统控制箱内设置有上位机和ups,所述上位机内存储有停靠船舶的信息。
6.所述运输平台上包括移动底盘以及移动底盘上设置的行走轮,各个所述行走轮上均安装有能够提供行走动力的伺服电机,所述移动底盘的侧面以及底面上均安装有检测摄像头及测距雷达。
7.所述前快速连接器和后快速连接器均包括由连接器公头及与连接器公头配合的连接器母头,所述连接器公头包括基座以及基座内设置的驱动电机、与驱动电机配合的蜗轮蜗杆以及与蜗轮蜗杆配合的凸点,所述驱动电机能够利用蜗轮蜗杆使凸点伸缩动作,所述基座上设置有插针。
8.所述连接器母头包括母头底座以及母头底座上设置的插接端,所述插接端上设置有与公头的凸点配合的凹槽以及能够在与连接器公头插接过程中进行导向的导向斜边,所述连接器母头上设置有与插针配合的插孔。
9.所述基座上还设置有用于引导连接器母头插入连接器公头内的导入罩,所述移动底盘上设置有与母头底座连接并用于对连接器母头进行插拔的机械手,所述连接器公头上
设置有红外发射端,所述连接器母头上设置有与红外发射端配合的母头红外接收端。
10.所述波浪补偿平台包括分别由外舱、外舱内的伺服电机以及由伺服电机驱动垂直升降的螺杆构成的多条支撑腿以及安装在各条所述支撑腿的螺杆顶部的台面,所述各条所述支撑腿均与波浪补偿平台控制系统连接。
11.所述机械臂包括通过下关节安装在波浪补偿平台上的下臂、通过上关节铰接在下臂顶端的上臂,所述后快速连接器安装在上臂上。
12.所述上臂安装有监控摄像头。
13.本实用新型的优点在于:
14.(1)既能实现为船舶靠港期间为船舶提供清洁能源,运输平台也可以自己移动,为不同泊位的船舶供电。
15.(2)整个岸电系统搭建在运输平台上,最左侧放置系统控制箱,里面包含上位机、ups等,上位机的后台系统保存有经常停靠船舶的信息,包括岸电插空位置、电制等等信息,这样电源可以自动设置供电参数,减少操作时间,提高智能化水平。
16.(3)运输平台行进过程中可以对船舶的名称、船型等信息进行拍摄,并与上位机的数据里的船型进行对比,可以自动识别船型,为电源参数的自动化设置提供条件
17.(4)运输平台能够保证岸电电源系统与船舶之间的距离位置相对固定,通过设置前快速连接器和后快速连接器,可以快速实现电力连接,快速为船舶供电,同时利用波浪补偿平台的波浪补偿功能可以保持后快速连接器位置与船舶位置相对不动(相对稳定),当波浪的运动幅度超过系统允许的最大幅度时,机械臂就会将快速连接器拔出,避免船舶震荡幅度过大损坏快速连接器,从而有效防止因波浪造成后快速连接件的脱落。
18.(5)前快速连接器和后快速连接器的连接器公头内具有伺服电机组成的逃逸系统,可以实现快速连接器的稳定连接与快速脱离,由此可以在出现险情时自动逃逸,提高了安全性。
附图说明
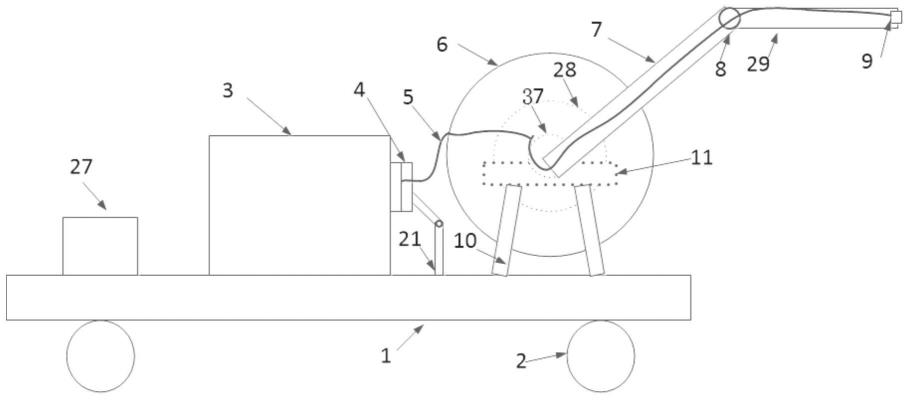
19.图1为本实用新型一体式智能岸电连接装置的侧视图;
20.图2(a)为本实用新型一体式智能岸电连接装置的运输平台示意图;
21.图2(b)为本实用新型一体式智能岸电连接装置的运输平台示意图;
22.图3(a)为本实用新型中连接器公头的主视结构示意图;
23.图3(b)为本实用新型中连接器公头的侧视结构示意图;
24.图3(c)为本实用新型中连接器母头的主视结构示意图;
25.图3(d)为本实用新型中连接器母头的侧视结构示意图;
26.图4为本实用新型中控制系统的原理框图;
27.图5为本实用新型中有波浪补偿平台安装结构示意图。
具体实施方式
28.下面结合附图和具体实施方式,对本实用新型的一体式智能岸电连接装置作进一步详细说明。
29.如图所示,本实用新型的一体式智能岸电连接装置,包括能够行走的运输平台1以
及运输平台上安置的具有高频电源及其控制电路的高频电源柜3、具有波浪补偿平台控制系统的波浪补偿平台11以及具有电缆绞盘控制系统的电缆绞盘6,运输平台1 上还安置有系统控制箱27,系统控制箱27内设置有上位机和ups 等,上位机内存储有经常停靠船舶的信息,包括岸电插空位置、电制等等信息,这样电源可以自动设置供电参数,减少操作时间,提高智能化水平,本实施例中,高频电源柜3、波浪补偿平台11、电缆绞盘6以及系统控制箱27等均选用304不锈钢,可以保证设备在海边长期使用不腐蚀,其中,运输平台上包括移动底盘以及移动底盘上设置的行走轮,各个行走轮上均安装有能够提供行走动力的伺服电机,移动底盘的侧面以及底面上均安装有检测摄像头及测距雷达,由图可见,移动底盘的侧面的安装孔28及前后两侧均安装有检测摄像头及微型测距雷达,可以感知周围环境,为运输平台的安全行驶建立环境模型,移动底盘底部的四个安装孔29也安装有检测摄像头与微型测距雷达,可以实时监测平台底部情况,运输平台可以自主前进,自主避障,无人驾驶到需要按点的位置,也可以根据需要设置驾驶室,在驾驶模式条件下需要人工进行干预,波浪补偿平台11上安装有用于与船舶供电端配合的机械臂7,机械臂7由机械臂控制系统控制,电缆绞盘6上缠绕有供电电缆5,供电电缆5的一端通过前快速连接器 4与高频电源柜3连接,后快速连接器9安装在机械臂上,供电电缆5的另外一端通过后快速连接器9与船舶供电端连接。
30.进一步地,所述前快速连接器4和后快速连接器9均包括由连接器公头及与连接器公头配合的连接器母头,前快速连接器4 和后快速连接器9均具有各自的快速连接器控制系统,如图4所示,机械臂控制系统、电缆绞盘控制系统、快速连接器控制系统、波浪补偿平台控制系统等共同构成整个控制系统,机械臂控制系统、电缆绞盘控制系统、快速连接器控制系统、波浪补偿平台控制系统均与上位机通过通讯协议进行连接,高频电源的控制电路和主电路均连接上位机同样与上位机通过通讯协议进行连接,如图3(a)、图3(b)所示,连接器公头包括基座12以及基座12 内设置的驱动电机13、与驱动电机13配合的蜗轮蜗杆14以及与蜗轮蜗杆14配合的凸点15,驱动电机13受快速连接器控制系统控制,当停靠船舶正常离岸或者受到的波浪冲击较大时或者船舶应急需要快速撤离时,驱动电机13利用蜗轮蜗杆14使凸点15 收回,基座12上设置有插针17,如图3(c)、图3(d)所示,连接器母头包括母头底座19以及母头底座19上设置的插接端,插接端上设置有与公头的凸点15配合的凹槽20以及能够在与连接器公头插接过程中进行导向的导向斜边22,凹槽20与公头的凸点15配合,保证连接器公头与连接器母头的可靠连接,连接器母头上设置有与插针17配合的插孔23。
31.另外,基座12上还设置有用于引导连接器母头插入连接器公头内的导入罩16,导向斜边22的作用是导入,使连接器母头更容易导入公头罩16,移动底盘上设置有与前快速连接器4的母头底座19连接并用于对连接器母头进行插拔的机械手21,机械手21具有机械手控制系统,机械手21受机械手控制系统控制可以顺利实现前快速连接头的插拔,连接器公头上设置有红外发射端18,连接器母头上设置有与红外发射端18配合的母头红外接收端24,连接器公头的红外发射端18与连接器母头红外接收端 24可以在连接器公头与连接器母头对接时提供位置信息,使两者快速对接。
32.再进一步地,如图5所示,所说的波浪补偿平台包括分别由外舱10、外舱10内的伺服电机26以及由伺服电机26驱动垂直升降的螺杆25构成的四条支撑腿以及安装在各条支撑腿的螺杆 25顶部的台面,各条支撑腿均与波浪补偿平台控制系统连接,四条之间的升降
互不影响,通过不同支撑腿的升降,例如同时升降前后两条支撑腿或同时升降左右两条支撑腿可以实现左右倾斜及前后倾斜,同时升降四条支撑腿可以实现波浪补偿平台的整体升降,由此通过波浪补偿平台可以根据波浪的起伏做到实时的补偿运动,保证后快速连接器与船体的相对位置不变,具体的说,工作时,当波浪补偿平台控制系统接收到波浪的位置、速度实时信号以后控制补偿平台的四条支撑腿开始运动,以此保证保持后快速连接器的位置与船舶位置相对不动,防止因为波浪造成后快速连接器的脱落,当波浪的运动幅度超过设定所允许的最大幅度时,机械臂就会将后快速连接器9拔出,避免船舶震荡幅度过大损坏后快速连接器9,机械臂包括通过下关节37安装在波浪补偿平台11上的下臂、通过上关节8铰接在下臂顶端的上臂29,后快速连接器安装在上臂29上,上臂29安装有监控摄像头,运输平台行进过程中可以对船舶的名称、船型等信息进行拍摄,并与上位机的数据里的船型进行对比,可以自动挑选目标船型,识别船型,为电源参数的自动化设置提供条件,电缆卷盘由盘面与中间转轴28组成,电缆卷盘安装在波浪补偿平台上,电缆卷盘的收放受电缆卷盘控制系统的控制,实现电缆的收放并控制电缆松紧,并能保证电缆收放的张力合理范围之内。
33.当然,上述说明并非是对本实用新型的限制,本实用新型也并不仅限于上述举例,本技术领域的技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
