1.本实用新型涉及水下探测技术领域,特别是涉及一种用于大型养殖网箱鱼群探测装置。
背景技术:
2.大型养殖网箱正在成为主要的鱼类养殖手段之一,其通过在海中建造围网的方式实现了海水鱼的饲养,并且可以通过多种控制手段对饲养的进程进行干预。
3.在网箱养殖过程中,网箱内鱼群数量的准确评估对于网箱的环境调整以及饲养方法的选择有着重要意义。目前主要存在以下几种计数方法:1.使用人工进行计数的方法,此方法较为简单,但是由于海水的透光性等原因难以看清水面下的鱼群,并且当网箱距离岸边较远时,为了保证人员的生活,需要额外投入大量资金用于建设生活保障设施。2.使用水下光学相机拍摄的方法,此方法可以直接获得水下视野以供探测,但是由于水下光线不充足,对于一个大型网箱来说,很难通过单个相机获得整个网箱内部的情况,并且在周围布置多个相机也只能提高对网箱壁近距离范围内的探测能力,无法对网箱较深区域取得良好的影像信号,并且水下光学相机售价十分高昂,带来了极高的建设成本。3.使用传统探鱼仪方法,包括单波束渔探仪和多波束渔用声呐,通过周期性向水中发射声波信号并检测鱼群的回波信号来探测在某个方向上是否有鱼,其中单波束渔探仪只能在固定方向上发射一个波束,所以无法做到对整个养殖网箱的探测;多波束探鱼仪通过波束成形的方法来实现在不移动换能器的情况下对平面的扫描,但是波束成形技术需要大量的换能器组成换能器基阵,其安装成本过高,无法大规模推广与使用。
技术实现要素:
4.本实用新型的目的是提供一种用于大型养殖网箱鱼群探测装置,以解决上述现有技术存在的问题,能够对整个大型网箱内的鱼群进行探测,而且成本低,探测效率高,探测结果准确。
5.为实现上述目的,本实用新型提供了如下方案:
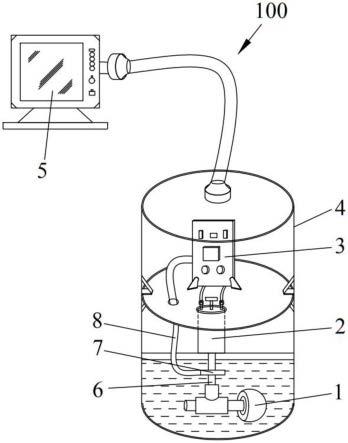
6.本实用新型提供一种用于大型养殖网箱鱼群探测装置,包括换能器、驱动装置、控制器、外壳和显控终端,所述换能器、所述驱动装置和所述控制器均安装在所述外壳内,所述驱动装置能够驱动所述换能器绕竖直轴旋转,所述换能器、所述驱动装置和所述显控终端均与所述控制器通信连接。
7.优选的,所述驱动装置为伺服电机。
8.优选的,所述驱动装置固定连接在所述外壳内,所述驱动装置的输出轴上固定连接有传动杆,所述换能器固定连接在所述传动杆上。
9.优选的,所述控制器固定连接在所述外壳内,所述传动杆上安装有导电滑环,信号电缆一端与所述控制器相连,另一端通过所述导电滑环与所述换能器相连。
10.本实用新型相对于现有技术取得了以下技术效果:
11.本实用新型提供一种用于大型养殖网箱鱼群探测装置,通过驱动装置驱动换能器绕竖直轴旋转,换能器在转动的过程中周期性的发射声波对网箱进行水平方向的扫描,在一个探测周期中,换能器在转动的过程中收集鱼群目标的反射回波信号并将反射回波信号传输至控制器,控制器对反射回波信号进行分析处理并将探测结果显示在显控终端上,换能器持续旋转直至旋转360
°
完成水平方向一圈的扫描探测,本实用新型采用驱动装置驱动换能器连续旋转进行扫描,能够对整个大型网箱内的鱼群进行探测,探测时间短,提高探测结果的准确性,探测效率高,而且结构简单,制作成本低。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
13.图1为本实用新型提供的用于大型养殖网箱鱼群探测装置的结构示意图;
14.图2为本实用新型提供的用于大型养殖网箱鱼群探测装置中的控制器的功能图;
15.图3为采用本实用新型提供的用于大型养殖网箱鱼群探测装置的探测示意图;
16.图中:100-用于大型养殖网箱鱼群探测装置、1-换能器、2-驱动装置、3-控制器、4-外壳、5-显控终端、6-传动杆、7-导电滑环、8-信号电缆。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.本实用新型的目的是提供一种用于大型养殖网箱鱼群探测装置,以解决现有技术存在的问题,能够对整个大型网箱内的鱼群进行探测,而且成本低,探测效率高,探测结果准确。
19.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
20.如图1~2所示,本实施例提供一种用于大型养殖网箱鱼群探测装置100,包括换能器1、驱动装置2、控制器3、外壳4和显控终端5,换能器1、驱动装置2和控制器3均安装在外壳4内,驱动装置2能够驱动换能器1绕竖直轴旋转,换能器1、驱动装置2和显控终端5均与控制器3通信连接。
21.使用时,通过驱动装置2驱动换能器1绕竖直轴旋转,通过控制器3控制换能器1在转动的过程中周期性的发射声波对网箱进行水平方向的扫描,其中,控制器3可选择嵌入式控制器,控制器3通过dma通道实现对驱动装置2的控制,驱动装置2带动换能器1进行旋转,控制器3中设有信号发射链路和信号接收链路,控制器3生成的低功率信号经信号发射链路送至换能器1进行发射,信号发射链路中设有功率放大器和滤波模块,功率放大器可以将生成的低功率信号变为可以驱动换能器1的大功率信号,再经过滤波模块优化信号,滤除多余
杂波后,送至换能器1进行发射;在一个探测周期中,换能器1在转动的过程中收集鱼群目标的反射回波信号并将反射回波信号经信号接收链路处理后上传至控制器3,信号接收链路中设有前置滤波器、模数转换器(a/d)和匹配滤波器,前置滤波器滤除一部分环境噪音后,在经模数转换器(a/d)将模拟信号转化为数字信号,之后通过数字匹配滤波器对特征信号进行匹配,以检测是否探测到了目标,并将结果上报给控制器3,控制器3对数据进行处理后将探测结果显示在显控终端上,控制器3控制驱动装置2驱动换能器1持续旋转直至旋转360
°
完成水平方向一圈的扫描探测,本实用新型采用驱动装置驱动换能器连续旋转进行扫描,能够对整个大型网箱内的鱼群进行探测,不用中途停止,缩短了探测时间,探测过程稳定,提高探测结果的准确性,提高了探测效率,而且结构简单,制作成本低。
22.在本实施例中,驱动装置2为伺服电机,驱动稳定,控制方便。
23.如图1所示,在本实施例中,驱动装置2固定连接在外壳4内,驱动装置2的输出轴上固定连接有传动杆6,换能器1固定连接在传动杆6上。通过传动杆6将换能器1与驱动装置2传动连接,结构简单,连接方便。
24.如图1所示,在本实施例中,控制器3固定连接在外壳4内,传动杆6上安装有导电滑环7,信号电缆8一端与控制器3相连,另一端通过导电滑环7与换能器1相连,确保信号电缆8不会因为传动杆6的转动而扭曲。
25.如图3所示,一种采用以上所述的用于大型养殖网箱鱼群探测装置100的探测方法,通过控制器3控制驱动装置2驱动换能器1旋转,以换能器1转动一个波束角θ为一个探测周期;在一个探测周期中,以t0时刻为起始点,在t0时刻通过控制器3控制换能器1发射声波对网箱内进行水平方向扫描,换能器1在转动的过程中收集鱼群目标的反射回波信号并将反射回波信号传输至控制器3,控制器3对反射回波信号进行分析处理并将探测结果显示在显控终端5上;换能器1持续旋转直至旋转360
°
完成水平方向一圈的扫描探测。
26.在一个探测周期中,换能器1在t0时刻发射声波后到t1时刻均处于接收模式(图3中剖面线部分),从发射声波至反射回波信号被接收用时为t,满足t0 t≤t1,使反射回波能够被换能器1接收,保证探测效果。
27.换能器1旋转角速度为(0.5
°
~1.5
°
)/s,优选为1
°
/s,保证换能器1在时间t内转动较小的角度,以换能器1能够接收反射回波信号为依据进行调整。
28.在一个探测周期内,控制器3收到反射回波信号时,控制器3根据收到反射回波信号的时间和换能器1旋转角速度计算出换能器1转过的角度,并根据换能器1转过的角度对鱼群目标的位置进行角度补偿。对于半径50m的网箱,使用1毫秒长度的信号即可达到较好的分辨率,对于一次360
°
探测按照波束角θ为3
°
将其探测过程分为120个探测周期,当距换能器1的距离为50米处存在鱼群目标时,根据水中声速1500m/s,波束需要约6.66ms才可返回,将接收时长定为7ms,即t0 7ms=t1,当7ms接收时间过去后,将关闭接收端,等待换能器1转动到下一个探测周期后再重复此过程,在此过程中,换能器1以角速度1
°
/s转过的角度为0.07
°
,由于波束角θ为3
°
已经远大于换能器1的转速,故换能器1转动造成的误差可以基本忽略,但是,为了提高探测精度,可在控制端人为根据换能器1转过的角度对鱼群目标的位置进行角度补偿计算,实现对误差的消除。
29.本实用新型中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一
般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
