用于控制核电站的方法和控制器
1.本发明涉及一种用于控制包括压水反应堆的核电站的方法。
2.此外,本发明涉及一种用于核电站的控制器。
3.给电网输送多种类型的能源产生的电能。特别地,可再生能源(例如风能和太阳能)是相当不稳定的。因此,为了稳定电网,核电站也必须越来越多地参与电网的调节。电网的调节是通过多种电网调节模式执行的,即在几秒内立即提供功率变化以支持网络频率的初级控制、其中远程命令增加或减少能量的请求的次级控制或负荷跟踪操作,在该操作中电能变化最迟必须在15分钟内提供。三级控制模式提供功率的中长期修改。
4.目前,将核电站用于不同的调节模式相当复杂。例如,核电站运营商基于以前的经验估计氙反应性。
5.ep0540951a1公开了用于控制核反应堆以使负荷跟踪操作期间的硼浓度最小化的方法和设备。关于这一点,结合使硼酸和去离子水注入最小化的目标,主要关注点在于控制负荷跟随操作期间的轴向功率分布和对应的轴向氙振荡。
6.de102017205553a1公开了一种用于预测负荷跟踪操作中的核电站的上升时期期间的氙浓度的方法。
7.ep2686851b1公开了一种用于在负荷跟踪操作期间操作压水反应堆的方法。
8.ep2157582a1公开了一种预测氙振动的方法。为此目的,确定反应堆功率的轴向分布,以便快速抑制氙振荡。
9.鉴于上述情况,本发明的目的在于提供一种改进的核反应堆控制方法,其能够以高可靠性在许多不同的网络控制模式中运行。
10.根据一个方面,一种用于控制核电站的方法,该核电站包括:具有产生功率的反应堆堆芯的压水核反应堆;将反应堆堆芯连接至蒸汽发生器的初级回路;能移动到反应堆堆芯中以控制反应堆堆芯的功率的一个或多个控制棒;用于将硼酸和/或去离子水注入初级回路中以控制反应堆堆芯的反应性的注入装置,该方法包括:
11.确定核反应堆的实际功率,
12.自动确定实际氙浓度、实际碘浓度和/或实际氙反应性,
13.获取目标功率和到目标功率的功率上升时期的功率梯度,
14.其特征在于,该方法还包括:
15.获取其中核反应堆以部分功率工作直到其上升到高于部分功率的目标功率的等待时期和/或剩余等待时期,
16.基于实际氙浓度、实际碘浓度和获取的等待时期,计算等待时期和/或剩余等待时期结束时的氙反应性和/或氙浓度,
17.计算功率上升时期结束时的氙反应性和/或氙浓度,
18.基于所计算出的等待时期结束时和上升时期结束时的氙反应性和/或氙浓度,计算一个或多个控制棒的用于开始功率上升的控制棒设定点,使得能够使用控制棒执行功率上升,
19.在等待时期期间,基于等待时期和用于开始功率上升的控制棒设定点定位一个或
多个控制棒,使得一个或多个控制棒在等待时期结束时达到用于开始功率上升的控制棒设定点。
20.另外的实施方式可以涉及以下特征中的一个或多个,这些特征可以以任何技术可行的组合进行组合:
[0021]-用于开始功率上升的控制棒设定点的计算,进一步基于核反应堆的一个或多个反应性值和/或反应性系数,特别是:一个或多个控制棒的一个或多个反应性系数、一个或多个l型棒的反应性系数、由于实际功率与目标功率之间的平均冷却剂温度(act)的差异造成的反应性变化、由于实际功率(pr)与目标功率之间的差异造成的反应性变化和/或注入的硼酸或去离子水的后续流动与初级冷却流体中的硼酸系数相结合的反应性贡献;
[0022]-用于开始功率上升的控制棒设定点的计算进一步基于控制棒的全功率设定点和/或l型棒的全功率设定点;
[0023]-当等待时期大于第一预定时间,允许将氙浓度提高到最大值时,该方法还包括:将一个或多个控制棒移出反应堆堆芯,以补偿由于氙浓度增加造成的反应性损失,以及在等待时期结束之前将一个或多个控制棒移动到反应堆堆芯中的用于开始功率上升的控制棒设定点;
[0024]-如果控制棒在移出反应堆堆芯时达到控制上限或满负荷位置,则添加一定量的去离子水以保持反应堆处于部分功率,以补偿由于氙浓度增加造成的反应性损失,特别是保证反应堆功率的可控性;
[0025]-该方法还包括:基于实际控制棒位置、用于开始功率上升的控制棒设定点和初级冷却流体中的实际硼酸浓度,确定一个或多个控制棒移动到用于开始功率上升的控制棒设定点的时间限制,为了在所确定的时间限制之前将一个或多个控制棒移动到反应堆堆芯中的用于开始功率上升的控制棒设定点,通过将去离子水注入初级回路中,以及向初级回路中添加去离子水;
[0026]-时间限制进一步基于去离子水的最小送入速率来确定;
[0027]-当等待时期短于第二预定时间,第二预定时间长于第一预定时间时,其中在等待时期期间氙浓度达到最大值之后,将一个或多个控制棒移动到反应堆堆芯中,以补偿由于氙浓度降低造成的反应性增加;
[0028]-当等待时期短于第二预定时间,第二预定时间长于第一预定时间时,该方法还包括:当在移动到反应堆堆芯中的过程中,控制棒到达用于开始功率上升的控制棒设定点时,向初级回路中添加硼酸并将控制棒保持在用于开始功率上升的控制棒设定点,特别是确保停机反应性;
[0029]-当等待时期长于第二预定时间,第二预定时间长于第一预定时间时,该方法还包括:在氙浓度在等待时期期间达到其最大值之后,向初级回路中添加硼酸,以补偿由于氙浓度降低造成的反应性增加,其中,特别地,控制棒保持处于控制上限或全功率位置直到在等待时期结束之前将一个或多个控制棒移动到反应堆堆芯中的用于开始功率上升的控制棒设定点;
[0030]-第一预定时间对应于氙最大值之后的2小时的时间,或氙最大值之后的直到氙最大值的等待时期的30%;
[0031]-第一预定时间在6小时到10小时之间和/或第二预定时间在20小时到60小时之
间;和/或
[0032]-计算总反应性以计算用于开始功率上升的控制棒设定点,该总反应性包括等待时期结束时的氙反应性和用于将功率上升到目标功率的上升时期结束时的氙反应性。
[0033]
根据另一方面,提供一种用于核电站的控制器,该核电站包括具有产生功率的反应堆堆芯的压水反应堆、将反应堆堆芯连接至蒸汽发生器的初级回路、能移动到反应堆堆芯中以控制反应堆堆芯的功率的一个或多个控制棒、用于将硼酸和/或去离子水注入初级回路中以控制反应堆堆芯的反应性的注入装置,该控制器适于:
[0034]
确定核反应堆的实际功率,
[0035]
自动确定实际氙浓度、实际碘浓度和/或实际氙反应性,
[0036]
获取目标功率和到目标功率的功率上升时期的功率梯度,
[0037]
其特征在于,控制器还适于:
[0038]
获取其中核反应堆以部分功率工作直到其上升到高于部分功率的目标功率的等待时期和/或剩余等待时期,
[0039]
基于实际氙浓度、实际碘浓度和获取的等待时期,计算等待时期和/或剩余等待时期结束时的氙反应性和/或氙浓度,
[0040]
计算功率上升时期结束时的氙反应性和/或氙浓度,
[0041]
基于所计算出的等待时期结束时和上升时期结束时的氙反应性和/或氙浓度,计算一个或多个控制棒的用于开始功率上升的控制棒设定点,使得能够使用控制棒执行功率上升,
[0042]
在等待时期期间,基于等待时期和用于开始功率上升的控制棒设定点定位一个或多个控制棒,使得一个或多个控制棒在等待时期结束时到达用于开始功率上升的控制棒设定点。
[0043]
根据实施方式,控制器适于执行本文公开的方法。
[0044]
根据从属权利要求、说明书和附图,另外的优点、特征、方面和细节是显而易见的。
[0045]
为了能够详细地理解本发明的上述特征的方式,可以通过参照实施方式来阅读上面简要概括的本发明的更具体的描述。然而,要说明的是,附图仅示出本发明的典型实施方式,因此不应被认为是对其范围的限制,因为本发明可以承认其他同等有效的实施方式。
[0046]
附图涉及本发明的实施方式并且在下面进行描述:
[0047]
图1示意性示出了根据一个实施方式的方法的流程图,
[0048]
图2以图形方式示出了依赖于反应堆的功率上升的氙反应性,
[0049]
图3示意性示出了对等待时期和上升时期期间的氙反应性的计算的控制,
[0050]
图4示意性示出了用于确定实际碘值和实际氙值的模型,
[0051]
图5示意性示出了预测氙浓度的模型,
[0052]
图6示出了氙浓度和控制棒或d型棒位置、硼酸供应、去离子水供应和反应堆功率在第一等待时期内随时间变化的曲线图,第一等待时期小于对应于氙最大值的8小时,并且与在次级模式下的运行相比,d型棒位置基本上保持在后续上升所需的值。
[0053]
图7示出了氙浓度和控制棒或d型棒位置、硼酸供应、去离子水供应和反应堆功率在第二等待时期内随时间变化的曲线图,第二等待时期在8小时到大约30小时之间,其中通过使用控制棒进行氙补偿而使硼酸和去离子水注入最小化。
[0054]
图8示出了氙浓度和d型棒位置、硼酸供应、去离子水供应和反应堆功率在第三等待时期内随时间变化的曲线图,第三等待时期长于大约30小时,用于全功率操作的控制棒位置用于扩展低功率操作(elpo),该扩展低功率操作使用用于拔出d型棒的氙以及去离子水通过自动反应性平衡将它们在调整的等待时期结束时带回上升所需的位置。
[0055]
图9示出了详细说明采用200个计算步骤基于对氙预测的调整的氙浓度的预测误差的曲线图,并且
[0056]
图10示出了反应性管理的可视化,目的是在用于反应堆运营商的过程计算机系统上增加核反应堆的功率。
[0057]
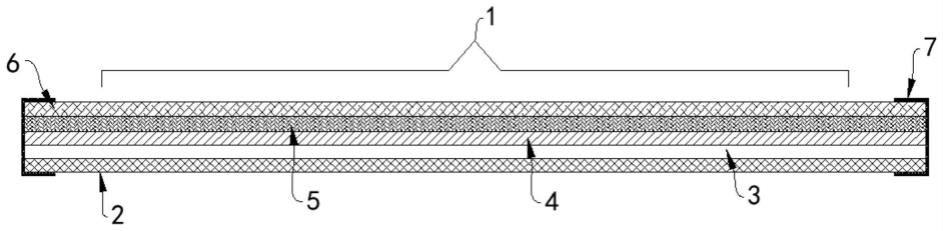
图1示意性示出了根据用于压水核反应堆的实施方式的方法的流程图。核反应堆3包括反应堆压力容器,该反应堆压力容器包括在反应堆堆芯中的燃料棒。核反应堆3、特别是反应堆压力容器连接至一个或多个初级冷却流体回路5或初级回路5,回路5中的冷却流体由主冷却剂泵7驱动。该一个或多个初级回路5利用冷却流体将燃料棒中的核燃料的核裂变产生的热量输送到一个或多个热交换器9。一个或多个初级回路5中的压力如此之高,以至于避免了在初级回路中循环的水或冷却流体的蒸发。
[0058]
一个或多个热交换器或蒸汽发生器9例如从在一个或多个次级回路中循环的水或次级冷却流体产生蒸汽。然后通过一个或多个次级回路11将蒸汽输送到一个或多个蒸汽涡轮机,由次级冷却流体产生的蒸汽在蒸汽涡轮机中膨胀并产生旋转,该旋转被一个或多个电机用于产生电能。次级冷却流体发生冷凝并被提供回热交换器9。
[0059]
核反应堆3包括多个棒,它们适于在燃料棒之间被驱动以控制核反应堆3产生的功率。例如,核反应堆包括所谓的l型棒14和d型棒16。l型棒14主要被提供用于控制反应堆堆芯内的局部功率密度或轴向功率分布。d型棒或控制棒16被提供用于控制反应堆堆芯的绝对功率。控制棒16吸收中子,并且根据插入深度,可以控制核反应堆的功率产生,例如由于对反应堆内的中子通量有影响。因此,通过使用控制棒16,可以快速调整核反应堆3的功率。控制棒16被组织成控制棒16的组(或棒束)。例如,核反应堆3可以包括多组控制棒16,每组包括3到8个控制棒16。
[0060]
控制棒16或d型棒的组可以在l型棒的位置、特别是l型棒14的自由端部(例如在控制棒16的自由端部对应于l型棒14的自由端部时)与控制棒16的完全插入的端部位置或下端部位置之间移动。如果从核反应堆3的顶部插入棒,则l型棒14和控制棒16的自由端部对应于下端部。在一个实施方式中,控制棒16端部的完全插入的端部位置几乎是核反应堆3的反应堆堆芯的底部。例如,下端部位置在控制棒16的大约300cm(厘米)插入处。控制棒16和l型棒14的插入深度基于伸入反应堆堆芯中的自由端部来确定。在本例子中,考虑的是控制棒16和l型棒14从顶部插入到核反应堆3中。其他类型的核反应堆可以具有从底部插入的控制棒16和l型棒14。那么,完全插入的端部位置是控制棒16的上端部位置。
[0061]
例如,具有约1500mw电功率的德国设计的典型pwr(压水反应堆)具有用于控制反应堆功率的控制棒16的4个移动组(或棒束),每个移动组(或棒束)有4个控制棒。这样的反应堆可以具有大约45个l型棒的一组l型棒。
[0062]
为了监测和控制核反应堆3,设置了用于连续检测中子通量密度的多个检测器,其中根据一个实施方式,在所谓的spnd(自供电中子检测器)喷枪18中提供八乘以六个检测器。
[0063]
根据实施方式,如何用l型棒控制轴向功率分配和对应的轴向氙振荡是标准反应堆控制58的一部分,因为它与具有德国设计的pwr中的“适应性功率分配控制”一起使用。这种“适应性功率分配控制”由“轴向2点氙计算”模块触发(一个点用于上部的半堆芯,另一个点用于下部的半堆芯;输入由spnd喷枪18给出)。“适应性功率分配控制”的动态以所需的l型棒位置变化与负荷变化并行地进行的方式进行调整。因此,这种适应性功率分配控制基本上不需要注入硼酸和去离子水来补偿用于在部分负荷下控制轴向功率分配pd的l型棒的位置变化。换言之,关于反应性,用于控制轴向功率分布的l型棒的位置变化由反应堆功率的变化引起的反应性效应来补偿。
[0064]
根据实施方式,控制棒16的组可以一个接一个地插入。控制棒的组或控制棒16对轴向功率分布仅有轻微影响。根据对平均冷却剂温度-act的测量,控制核反应堆的功率并因此控制控制棒16的移动。
[0065]
bode注入(硼酸和/或去离子水注入)的最小化是根据本公开实现的,并且通过适合于几种电网相关的控制模式的整个反应性控制的方式给出。
[0066]
此外,核反应堆包括传感器20,用于例如通过中子通量检测核反应堆3的功率。
[0067]
根据实施方式,核反应堆3的功率通过在发电机等级(generator level)下调节的功率来控制。然后,移动控制棒16和l型棒14以使核反应堆3的功率适应发电机所需的功率。在调整核反应堆3的功率时,主冷却流体的温度也发生变化。功率越高导致初级冷却流体的温度越高。冷却流体的温度对核反应堆3的反应性也有影响。
[0068]
通过修改硼酸和/或去离子水的浓度来控制特别是由于氙和燃料消耗造成的反应性的长期改变。这两种流体之一的这种添加在本公开中也可以被称为bode添加或注入。初级回路5内的硼酸充当中子吸收剂。因此,硼酸浓度越高,功率或反应性就越低。为了增加反应性,向初级回路5中添加去离子水以降低硼酸的浓度并因此增加反应性。存在将去离子水24和/或硼酸26注入初级回路5中的单独的泵22、23。泵22被提供用于将去离子水24注入初级回路5中,而泵23被提供用于将硼酸26注入初级回路5中。去离子水24和/或硼酸26的量可以使用阀28、30和/或泵22、23来控制。泵22、23仅在需要bode注入的情况下运行。
[0069]
由于反应堆堆芯中氙-135(以下称为氙或xe)浓度的复杂的时间相关函数,使对核反应堆的控制变得复杂。氙充当中子毒物或中子吸收剂。氙值在几小时内发生变化。由于核燃料的裂变链,产生氙,氙在吸收中子时以及因氙衰变而消失。然而,产生和中子吸收存在一定的时间延迟,因此对于核反应堆的实际和未来功率,必须考虑氙的实际值、过去值和未来值,特别是以便通过硼酸的浓度(通过bode注入)对控制棒16的位置进行最佳控制。当核电站以恒定功率长时间运行时,氙浓度达到平衡或稳定状态。氙反应性是氙浓度的线性函数。
[0070]
图2示出了以部分功率运行特定时间的核反应堆的两个例子。
[0071]
在图2的(a)中,功率pr首先是100%(即核反应堆的全功率),然后降低到全功率的30%。然后将作为全功率的30%的部分功率保持约2小时,然后在a点使功率上升,达到全功率的98%。在部分功率期间,氙浓度增加,因此氙反应性也增加。在b点,核反应堆达到作为全功率的98%的目标功率。可以看出,氙反应性在上升期(即在a点到b点之间)降低,因为反应堆烧掉氙-135,氙-135在a点后开始吸收更多中子并且不久降低反应性。从图2的(a)可以看出,由于氙的烧掉,a点到b点之间的氙反应性的降低为大约100pcm,这对应于一组d型棒
或控制棒的长度的大约20%的移动。
[0072]
在图2的(b)中,功率pr首先是100%(即核反应堆的全功率),并且然后降低到全功率的30%。然后将作为全功率的30%的部分功率保持约6小时,然后在a点使功率上升,达到全功率的98%。在b点,核反应堆达到作为全功率的98%的目标功率。可以看出,氙反应性在上升期(即在a点到b点之间)降低,因为反应堆烧掉氙-135,氙-135在a点后开始吸收更多中子并且不久降低反应性。从图2的(b)可以看出,由于氙的烧掉,a点到b点之间的氙反应性的降低为大约500pcm,这对应于一组d型棒或控制棒的大约100%的移动。
[0073]
因此,可以看出,氙浓度和基于氙的反应性在很大程度上取决于等待时期和核反应堆3的先前操作。
[0074]
核电站可以以与电网的需要相关的多种运行模式运行。
[0075]
在初级控制模式下,在几秒内立即提供功率以支持网络频率,其中在0到15分钟之间(通常在几秒内)提供额外功率以稳定电网频率。从与标准频率的电网频率偏差中扣去初级控制。
[0076]
在次级控制模式下,最迟在15分钟后从发电站提供所需的功率。这也被称为负荷跟踪操作。在次级控制模式下,通过发电机目标功率远程命令对额外能量的请求,该发电机目标功率可以逐步改变。额外的电能必须最迟在15分钟内提供。只有最大功率梯度dpg/dt和功率范围是提前已知的。部分功率运行时间可能是几小时。以随机方式请求功率改变。在次级控制中,pr目标功率必须随时实现,因此控制棒16必须具有特定的预先定义或预先确定的位置。
[0077]
三级控制模式提供功率的中长期修改。在三级控制中,持续时间和所需功率在电网运营商和反应堆运营商之间确定。
[0078]
初级控制可以与二级和三级控制并行应用。
[0079]
在三级控制中,根据反应堆运营商与电网运营商之间的协议,在一段等待时间后进行功率上升。功率上升取决于实际反应堆功率pr、pr目标功率和功率上升率(也被称为功率梯度dpg/dt)。如上所述,功率请求由发电机控制提供给核反应堆。因此,必须提供给电网的功率梯度dpg/dt也由发电机控制提供。在三级控制模式中,这对应于所使用的值,而在次级控制模式中,这对应于最大功率梯度。
[0080]
在图1中,流程图包括几个输入值,特别是使用传感器20测量的实际反应堆功率pr、例如由反应堆运营商提供的pr目标功率32、例如由反应堆运营商提供的到功率向pr目标功率32上升的等待时期34、例如可以通过按钮36启用或停用的电网次级控制36、例如可以通过按钮38启用或停用的电网初级控制、自动确定的反应性系数40以及基于总反应性平衡来启用或停用控制棒组设定点调整的控制设定值预测影响42。
[0081]
实际反应堆功率pr也可以使用其他方式来确定,例如通过确定发电机的功率。
[0082]
反应性系数40由堆芯设计计算来提供,该计算针对每个燃料元件循环进行。这些系数是反应堆控制软件中的变量,它们取决于反应堆堆芯的平衡硼浓度,该浓度在整个燃料元件循环期间降低以补偿燃料烧耗。换言之,反应性系数是基于反应堆堆芯的平衡硼浓度计算的。在燃料元件更换或停机期间通过服务单元设置这些变量。换言之,使用特性曲线基于核反应堆3的平衡硼浓度确定每个反应性系数。反应性系数40在燃料元件循环期间缓慢改变。反应堆堆芯的平衡硼浓度是在核反应堆3以稳定或恒定功率长时间运行期间、特别
是当氙浓度在全功率下达到稳定值时使用的硼酸浓度。使用的多个反应性系数将在下文中利用图10进行说明。由于反应性系数40变化非常缓慢,因此它们可以被认为是用于计算反应性平衡的常数。换言之,反应性系数是变量,它们取决于实际燃料元件循环(例如1年)中的“满负荷天数”或相关参数(作为满负荷平衡条件下的参考硼浓度),并且可以根据下一个堆芯的堆芯设计,在燃料元件更换期间通过反应堆控制的接口或服务单元设置为特征数。
[0083]
图1中的流程图包括实际值计算模块44,其中基于核反应堆3的实际和过去功率pr计算核反应堆3中、特别是核反应堆3的反应堆堆芯中的氙和碘的实际浓度值。实际氙值在图1中也被标示为xe值,实际碘值被标示为j值。在其他实施方式中,如图4所示,提供氙反应性ρ
xe
而不是氙浓度。
[0084]
图4示出了基于核反应堆的实际和过去功率pr对氙和碘的实际浓度值的计算。该计算适合于核反应堆3的类型和核燃料的装载。输入值是核反应堆的实际功率pr。标有γ
xe
、λj、λ
xe
、bxe、aj、axe的框是使用已知参数的线性函数。带叉形记号的框是倍增器(multiplier)。关于碘浓度,积分器45a考虑核反应堆3的功率pr的过去值。换言之,积分器通过对碘产生与碘衰变之间的差值进行积分来获取实际的碘浓度值。从直接氙产生和来自碘衰变的氙的总和中减去氙衰变和中子吸收造成的氙损失。积分器45b根据氙浓度梯度计算氙浓度实际值。在图4所示的实施方式中,使用γ
xe
计算得到实际的氙反应性值ρ
xe
。例如,氙的反应性值以pcm(per cent mille)为单位提供。
[0085]
图1的流程图还包括预测模块46。预测模块对核反应堆3中、特别是核反应堆3的核堆芯中的氙的浓度、特别是碘的浓度执行循环预测。
[0086]
预测模块46预测等待时期的、特别是剩余等待时期结束时和上升时期结束时的氙浓度。为此目的,预测模块从实际值计算模块44获取实际的氙和碘浓度值,获取上升所需的时间δt
上升
并从控制模块48获取等待时期和上升时期的反应堆功率pr的设定值。
[0087]
控制模块48基于pr目标功率的输入值、核反应堆3是否应该以次级控制模式工作(从框36获取)、剩余等待时期和核反应堆3的实际功率pr提供用于氙预测的所有需要的值。
[0088]
就图3和图5来说明预测模块46的功能。预测模块46以迭代方式计算氙浓度并因此计算氙反应性。在一个实施方式中,另外还计算碘浓度值。标有γ
xe
、λj、λ
xe
、bxe、aj、axe的框是使用已知参数的线性函数。带叉形记号的框是倍增器。为了考虑碘浓度的时间依赖性,使用积分器48a。换言之,积分器通过对碘产生与碘衰变之间的差值进行积分来获取碘浓度值。从直接氙产生和来自碘衰变的氙的总和中减去氙衰变和中子吸收造成的氙损失。积分器48b根据氙浓度梯度dxe/dt计算氙反应性实际浓度值ρ
xe
。为了开始预测,在预测操作开始时读取一次实际氙浓度值和实际碘浓度值。框48c以特定的时间增量触发每个计算步骤,这将在下面说明。使用γ
xe
计算得到等待时期结束时或上升结束时的预测氙反应性值ρ
xe
,这也将在下面说明。根据实施方式,等待时期的结束对应于功率上升的开始。
[0089]
出于计算的目的,将(剩余)等待时期和上升时期划分为预先定义的步骤数。根据一个例子,使用50到500个步骤,特别是100到300个步骤。在所示的实施方式中,分别为等待时期和上升计算200个步骤。这意味着,对于等待时期和上升时期,两个后续计算步骤之间的时间距离δt或δt
增量
可能不同,因为例如上升时期可能比等待时期短很多。例如,由于在等待时期期间的氙浓度和/或氙反应性在达到其最大值后总是趋向于达到平衡状态,因此,尽管等待时期的长度例如为40小时或100小时或更长时间,也可以使用固定数量的计算步
骤。
[0090]
如果等待时期为零,例如当核反应堆3以二级模式运行时,参见下文,则仅计算上升时期的预测。出于计算的目的,预测模块46将计算出的预测氙浓度、氙反应性值和/或碘浓度值存储到相应的存储器中。在一个例子中,存储等待时期结束时(见图3中的a点)和上升时期之后(见图3中的b点)的氙浓度值和/或氙反应性ρ
xe
。图5中的δt
增量
对应于图1中的δt
上升
和δt
等待时期
。
[0091]
应说明的是,只有在核反应堆应以三级控制模式而不是次级控制模式工作(或图中标有n-sr的负荷跟踪操作)的情况下,才执行等待时期的预测。
[0092]
实际碘浓度和实际氙浓度或反应性值相应地在等待时期开始时读取以供计算(如果存在等待时期),或在上升开始时读取(在没有等待时期的情况下或当等待时期已过时)。
[0093]
应说明的是,等待时期随着时间的进展而减少,即,每次预测模块46再次开始完全计算氙浓度、氙反应性和/或碘浓度值时,进行出于计算目的的开始。
[0094]
基于等待时期和上升时期的反应堆功率pr的设定值,存储特别是等待时期之后(图3和图5中的a点)和上升时期之后(图3和图5中的b点)的氙反应性ρ
xe
或氙浓度。
[0095]
上升时期之后的氙浓度或氙反应性ρ
xe
(b点)和上升时期之前或开始功率上升之前的氙浓度或氙反应性(a点;在三级控制模式的等待时期结束时,或次级控制模式的实际氙浓度)用于通过预测器46确定上升时期期间的氙浓度变化和/或氙反应性变化δρ
xe
。
[0096]
根据实施方式,预测模块46还计算等待时期和/或上升时期、特别是在等待时期结束时的碘浓度。
[0097]
实际值计算模块44和预测模块46以及控制模块48一起形成串联模块50,其在数字反应堆控制系统中自动且实时运行。例如,每个实际值计算模块44和预测模块46分别每50毫秒计算预测的氙反应性和/或浓度值。预测模块46的新预测基于相应地更新的实际的氙和碘浓度值。基于200个计算步骤,分别在等待时期和上升时期的氙反应性的计算时间相应地需要大约10秒。这意味着总共20秒与三级控制相关,而只有10秒与随机次级控制相关,在随机次级控制中需要更快的计算结果。该方法的准确性将在后面讨论。
[0098]
预测值能够计算在上升阶段期间对氙反应性ρ
xe
的支持。应说明的是,氙反应性和/或氙浓度仅取决于核反应堆的功率及其时间相关的变化。这种氙反应性或浓度预测只是整个反应性平衡的一部分,需要整个反应性平衡来确定在下一次上升之前的最佳控制棒16的位置。
[0099]
在上升期间从预测模块46预测的氙反应性变化δρ
xe
被提供给反应性平衡模块52,该模块另外考虑基于反应性系数模块40提供的反应性系数的总反应性平衡的部分。详细地,为了计算用于开始功率上升或上升开始时的预定控制棒设定点和/或总反应性平衡,除了氙外,还考虑了以下一种或多种反应性影响。特别是根据图10,反应性平衡对于反应堆运营商来说被可视化。
[0100]
(总)反应性平衡适于基于反应性值来确定最佳控制棒16的位置,使得核反应堆可以使用控制棒16随时或在等待时期之后达到pr目标功率。在本技术中,这种最佳控制棒位置也可以被称为用于开始功率上升的预定控制棒设定点。
[0101]
然后可以将控制棒位置提供给控制棒组设定点调整器54。在图10中,pr目标功率被设置为满负荷的100%,满负荷是核反应堆3的最大允许功率。为此目的,还考虑到预测的
上升期间的氙反应性变化δρ
xe
的总反应性(图10中的σρ)在最佳情况下应为零。
[0102]
潜在反应性ρd(由于d型棒或控制棒16的升高(δd)而导致的可能的反应性增加。潜在反应性可以基于控制棒的有效性γ
dm
计算,有效性γ
dm
是由反应性系数模块40提供的反应性系数,控制棒的实际插入深度(δd)在l型棒的下端部下方;有效性γ
dm
关于取决于插入深度的变化效率进行平均。潜在反应性ρd通过将有效性γ
dm
与实际插入深度(δd)相乘来计算,并对应于通过将控制棒或d型棒升高到l型棒的下端部的潜在反应性。
[0103]
应将控制棒或d型棒升高到它们的固定的全功率(核反应堆的)设定点(这里在l型棒下方约45cm作为控制裕度),该设定点在图10中被表示为vfa值。这将使可能的反应性增加减少反应性值ρ
vfa
。固定的全功率设定点可选地用于即使在全功率下也提供升高控制棒的可能性,以便调节小的功率变化。控制棒在满负荷时的操纵裕度的反应性ρ
vfa
与该插入深度γd处的反应性系数分开考虑。潜在反应性ρ
vfa
是将有效性γd乘以满负荷设定点到l型棒组、特别是l型棒的下端部的距离来计算的。这里,作为反应性系数的有效性γd由反应性系数模块40提供。
[0104]
另一个潜在的反应性值可以是由于l型棒的实际插入深度(δl)低于其固定的全功率设定点造成的l型棒的反应性ρ
l
。对应于l型棒的有效性的对应的反应性系数(γ
l
)由反应性系数模块40提供。主要需要移动l型棒来抵消在部分负荷时的轴向功率分布的峰顶趋势。潜在反应性ρ
l
是通过将有效性γ
l
与实际插入深度δl相乘来计算的。
[0105]
另一个值是由于反应堆功率到pr目标功率的未来上升(δp)造成的反应性ρ
p
及其由反应性系数模块40提供的反应性系数(γ
p
)。
[0106]
由于初级回路5的平均冷却剂温度(act)与满负荷时的参考温度的差值(δact;在本例中在满负荷时大约为310℃)造成的反应性ρ
act
及其由反应性系数模块40提供的反应性系数γ
t
。
[0107]
根据一个实施方式,反应性平衡还可以考虑由通过化学体积控制系统cvcs的bode注入的空载时间效应引起的反应性影响ρ
cvcs
,该空载时间效应由死区时间模拟结合硼浓度γc的相关反应性系数确定。在该例子中,硼浓度γc的反应性系数也由反应性系数模块40提供。
[0108]
为了能够特别是通过使用控制棒或d型棒16而上升到pr目标功率,所有考虑的反应性值的反应性总和σρ=ρ
vfa
ρd ρ
l
ρ
p
ρ
act
ρ
xe
ρ
cvcs
应为零。可以有更多或更少的反应性值来计算反应性总和、反应性平衡、最佳控制棒位置和/或用于开始功率上升的预定控制棒设定点。在pr目标功率下,即在上升之后,它也应为零。因此,用于上升的控制棒16的最佳位置被确定并用于计算反应性平衡。因此,根据实施方式,基于总(预测的)反应性来计算用于开始功率上升的最佳控制棒位置或预定控制棒设定点。
[0109]
如果存在任何偏差,例如如图10中所示的σρ=56pcm,当控制棒未处于用于上升的最佳位置并且特别是被提供给控制棒组设定点调整器54时,所需的bode注入量是基于硼浓度的反应性系数γc和与初级回路和cvcs一起的质量总和相关的线性化(简化)混合物公式(见下文)来计算的,以确定以kg和或kg/s为单位(根据运营商的喜好)的bode量。作为硼酸相关混合物公式的输入数据,需要硼酸储罐cb中的硼浓度。混合物公式如下:
[0110]
[0111][0112][0113][0114]
其中qb是注入的硼酸的质量,qd是去离子水的质量,c是初级冷却流体中硼酸的浓度,δc是初级冷却流体中硼酸浓度的变化,cb是注入的硼酸中的硼酸浓度,cd是注入的去离子水中的硼酸浓度,m是初级冷却流体与化学体积控制系统cvcs一起的质量。例如,注入的硼酸中的硼酸浓度约为7000ppm,注入的去离子水中的硼酸浓度低于1000ppm(百万分之几)。例如,质量m在310℃时约为300吨。
[0115]
通常,反应性系数模块40的反应性系数没有时间延迟效应或强烈依赖于时间。反应性系数模块40中的反应性系数不包括用于氙反应性系数的系数。
[0116]
根据实施方式,当核反应堆以从上述考虑和系数得出的三级控制模式运行时,特别是由反应性平衡模块52计算时间标准,该反应性平衡模块52确定在上升之前使控制棒16到达用于开始功率上升的预定控制棒设定点所需的时间,用于开始功率上升的预定控制棒设定点是例如通过使用硼酸或去离子水注入而上升到目标功率值所需要的。例如,出于该目的,不仅用于开始功率上升的预定控制棒设定点,而且实际控制棒位置和基于上述公式(1)至(4)中的一个或多个的初级冷却流体的混合物也在计算到达用于开始功率上升的预定控制棒设定点的时间时被考虑在内。如果达到时间标准,反应性平衡模块52适于通知浮动/elpo模块56应终止浮动或elpo模式,这些模式在下文中被称为第二子模式和第三子模式。时间标准特别是取决于由反应性系数模块40提供的反应性系数和/或控制棒16的实际设置。在一些实施方式中,添加一定额外的时间以便具有安全裕度。
[0117]
考虑到选定的电网运行模式,将自动使用以下策略和调整:
[0118]
如果选择次级控制模式,例如如果按钮36被启用,这意味着等待时间应该为零,(n-sr为开启(on);等待时间为零),核反应堆必须随时达到pr目标功率,这是无法预测的。为此目的,必须调整控制棒16,以使得可以随时通过控制棒16的移动达到pr目标功率。这是通过预测功率上升期间、特别是功率上升时期的开始时和结束时的氙反应性来完成的,以便了解部分氙反应性支持功率以选择的最大功率梯度dpg/dt的上升。
[0119]
在次级控制模式中,与最小化硼酸和/或去离子水的添加相比,达到目标功率占优势。例如,如图6所示,在需要硼酸注入之后,必须通过去离子水注入来补偿在部分负荷下达到氙最大值的氙积累。硼酸注入和去离子水注入特别是由标准反应堆控制58自动执行的,该标准反应堆控制58将控制棒16保持在由控制棒组设定点调整模块54提供的调整后的设定点或位置,这由反应性平衡模块52提供。换言之,最佳控制棒位置或用于开始功率上升的预定控制棒设定点被控制棒设定点调整模块54直接用作设定点。在次级控制模式中,不需要计算等待时期的氙反应性的预测。在图6中,示出了次级模式以及第三模式的第一子模式的曲线图。关于去离子水注入和控制棒16的位置,次级模式用连续的粗线60a、60b示出。在这种特殊情况下,其他曲线或曲线图对于下面讨论的次级模式和第三模式的第一子模式是相同的。曲线图60b示出了控制棒16的设定点和它们的实际值。在图6中,由于缩放,控制棒或d型棒16的位置的设定点和实际值无法区分。
[0120]
通常,在被降低以降低核反应堆3的功率后,控制棒16(d型棒束或d型棒的组)在等待时期期间连续升高一点,直到通过反应性平衡模块52根据计算的设定点得到氙最大值,因为用于斜升的氙反应性支持因增加的氙的烧耗效应而增加。
[0121]
根据实施方式,通过进入其中核反应堆以部分负荷运行的等待时期来检测三级控制模式,从而例如可以进一步最小化bode注入。
[0122]
根据等待时期,可以以一种或多种、特别是三种不同的子模式控制核反应堆。等待时期的开始被定义为功率降低到部分功率的时间。例如,部分功率可以在核反应堆最大功率的30%到90%之间。下面详细说明这三种不同的模式。
[0123]
当功率降低时,浮动/elpo模块56根据调整后的等待时间自动存储使用哪个子模式。
[0124]
根据实施方式,在浮动模式或elpo期间对设定点的控制优先于由反应性平衡52给出的对设定点的控制。例如,如果浮动/elpo模块56向控制棒组设定点调整模块54提供信息,是使用浮动模式还是elpo模式,这会推翻由反应性平衡模块52提供的设定点。换言之,根据调整后的等待时间,浮动/elpo模块56向控制棒组设定点调整模块54提供信息,是使用浮动模式还是elpo模式。然后,控制棒组设定点调整模块忽略由反应性平衡模块52提供的设定点。
[0125]
例如,在等待时期t
pl
对应于部分负荷时间或部分负荷阶段的持续时间的情况下,在小于第一预定时间的部分负荷下,使用第一子模式。第一预定时间与达到最大氙浓度的时间有关。这意味着,可以预期,在这个大约8小时的时期内,只有氙造成的反应性损失。在一些实施方式中,第一预定时间例如是氙最大值之后的2小时,或氙最大值之后的氙最大值之前的等待时间的30%。根据图6所示的实施方式,控制棒设定点61(细线)被确定为使得在等待时间之后可以达到pr目标功率。这里,设定点61a对应于能够在功率上升之后达到目标功率的控制棒的预测位置。由于氙浓度造成的反应性降低与在次级控制模式中一样经由反应堆控制58通过添加去离子水来补偿。第一线和第二线示出向初级回路中添加硼酸和去离子水的阶段。与次级模式相比,如在上述的次级控制模式的例子中一样,去离子水的注入开始得稍晚一点,见细线63a,因为必须拔出控制棒16(d型棒的组)—补偿氙积累—以达到其用于功率上升的设定点,参见到达控制棒设定点61a的虚线63b。硼酸注入被标准反应堆控制58中的氙积累信号阻止。考虑到等待时期,控制棒16的该设定点在此考虑了由于从等待时期开始烧耗效应增加造成的氙最大时的用于上升的氙反应性支持。三级控制模式的第一子模式的其余曲线对应于图2中的次级控制模式的曲线,即在功率减小期间,实际控制棒位置对应于粗线。
[0126]
硼酸和去离子水的量由标准反应堆控制58确定,该标准反应堆控制58将控制棒16保持在由控制棒组设定点调整模块54提供的调整后的设定点,这由反应性平衡模块52提供。如上所述,浮动/elpo模块56不向控制棒组设定点调整模块54提供设定点。使用由反应性平衡模块52提供的用于开始功率上升的预定控制棒设定点。
[0127]
第三线示出随时间变化的氙浓度,第四线示出控制棒16的位置(它们插入反应堆堆芯中的厘米数),第五线示出随时间变化的核反应堆3的功率。该控制子模式的功能类似于次级控制模式。在这种情况下,在xe预测中只考虑等待时间。因此,例如图10所示的反应性平衡对于反应堆运营商而言在上升阶段的可视化即使在等待时间开始时也更加精确。
[0128]
根据该例子,示出了等待时期/等待时期结束时的控制棒设定点61a,其基于整个反应性平衡,该整个反应性平衡包括在氙最大时支持核反应堆3上升的预测的氙反应性。换言之,它是用于开始功率上升的预测的控制棒设定点。当进入部分功率模式时,降低控制棒或d型棒16以减小核反应堆3的功率,这里减小到全功率的约75%。从图6可以看出,氙浓度在等待时期期间升高。这通过在控制棒16到达预期设定点61a之后向初级回路3中添加去离子水来补偿。最迟到等待时期结束(这里,等待时期为大约6小时),控制棒16到达位于用于开始功率上升的位置的控制棒设定点61a。在上升期间,氙浓度由于上面已经描述的效应而降低(即氙-135烧掉)。在达到pr目标功率之后,氙浓度仍然降低,因此向初级回路中加入硼酸以降低反应性,这是由于氙浓度降低所造成的。
[0129]
在图7中,在部分负荷下的等待时期t
pl
在第一预定时间(例如8小时)与第二预定时间(例如大约30小时)之间。这意味着,可以预期,在氙造成的反应性损失之后会有反应性胜利,这可以通过移动控制棒16以最大限度地减少bode注入来补偿。为此目的,使用第二子模式,即所谓的浮动模式。第二预定时期(这里约30小时)对应于在长期部分负荷运行期间、特别是d组或控制棒应处于其“满负荷位置”以具有优化的燃料烧耗和关于芯块包壳相互作用(pci)的最佳调节堆芯时必须考虑不同方面、特别是关于elpo的方面的时间。
[0130]
在第二子模式中,浮动/elpo模块56通知控制棒组设定点调整模块54应使用第二子模式或浮动模式。根据实施方式,模块54在接收到应使用第二子模式或浮动模式的信息时命令标准反应堆控制58禁止bode注入以特别是在控制棒16的控制上限(ucl)和控制下限内补偿氙浓度变化。因此,在核反应堆3的恒定功率的情况下,氙浓度通过标准反应堆控制58进行的控制棒16的移动来补偿(例如通过act控制间接地)。换言之,模块54忽略反应性平衡模块52提供的设定点。
[0131]
将在图7的帮助下详细说明第二子模式或浮动模式。第一线和第二线示出向初级回路中添加硼酸和去离子水的阶段。与之前的情况相比,硼酸和去离子水的量极其少,因为正常的控制棒d组控制关于启用bode注入时被停用,并且d组或控制棒移动以补偿氙反应性变化(例如,通过反应堆控制58内的act控制器)。根据实施方式,控制棒16在标准反应堆控制内的调节极限值之间移动(例如ucl=“控制上限”以确保到l型棒组的下端部的最小距离)。因此确保控制棒16不会被插入得太少。第三线示出随时间变化的氙浓度,第四线示出控制棒16的位置(它们插入反应堆堆芯或核堆芯中的厘米数),第五线示出随时间变化的核反应堆3的功率。
[0132]
在该第二子模式中,氙浓度的增加由控制棒16补偿。换言之,控制棒16被移出反应堆堆芯,直到它们到达其控制上限ucl。如果还需要进一步补偿氙浓度的增加,则向初级回路中添加一定量去离子水,参见大约在6小时到8小时之间的氙浓度曲线图的最大值。当氙浓度在其最大值后降低时,总反应性增加,因此控制棒在反应堆堆芯中向下移动,直到大约300cm(厘米)的深度,它们在大约15小时时达到该深度。在这种特殊情况下,棒在大约15小时时到达用于使功率上升到pr目标功率的预定位置。
[0133]
当功率应增加到pr目标功率,这里是核反应堆3的功率的100%时,控制棒16被抬起。同时,氙浓度降低,从而达到目标功率后,氙浓度的进一步降低通过添加硼酸来补偿。在最小氙浓度后,氙浓度在大约30小时后上升到平衡状态。由于中子吸收和氙衰变,氙的产生在平衡状态下对应于氙的烧掉。在升高过程中,再次添加去离子水以补偿氙浓度的变化。
[0134]
从图7可以看出,阴影区域示出了与反应堆控制的比较,其中控制棒保持插入以用于稍后的上升。图7中的例子示出了在不考虑等待时间的情况下,与标准规定相比,硼酸和去离子水的最大减少量。应说明的是,当循环接近结束时(即在燃料棒必须被更换为新燃料棒之前),硼酸和去离子水的减少量增加,因为去离子水的添加量急剧增加。例如,为了达到同样的效果,与循环开始相比,在循环结束时去离子水添加呈指数方式增加(在燃料元件循环的最后20%中,高出10倍)。因此,初级回路5的冷却水的处理或再循环的成本增加,否则负荷灵活性将降低。
[0135]
如果等待时间短于图7中的这个例子(例如11小时),控制棒将不会到达用于功率上升的预定控制棒设定点或用于开始功率上升的控制棒设定点,通过简单地补偿氙浓度的降低,浮动/elpo模块56接收来自反应性平衡模块52的信号(例如终止信号“达到时间标准”),以终止浮动模式。因此,控制被移交给标准反应堆控制58,该标准反应堆控制适于控制阀28,以便向初级回路5中添加更多的去离子水,使得控制棒16在用于使功率上升的等待时期结束以前可以到达由反应性平衡模块52提供的用于开始功率上升的预定控制棒设定点。换言之,用于开始功率上升的预定控制棒设定点由控制棒设定值调整54根据反应性平衡52的结果和在氙预测模块46中计算的等待时间来提供。
[0136]
如果等待时间长于图7中的这个例子(例如20小时),控制棒将超过用于开始功率上升的预定控制棒设定点,预定控制棒设定点由反应性平衡模块52确定,通过简单地补偿氙浓度的进一步降低,浮动/elpo模块56例如通过接收来自反应性平衡模块52的信号而终止第二“浮动”子模式并且控制被移交给标准反应堆控制58。这对于为了能够在紧急停堆的情况下将控制棒16进一步插入反应堆堆芯(确保停堆反应性)是重要的。换言之,控制棒16没有被进一步降低,因为标准反应堆控制根据控制偏差开始硼酸注入,控制偏差由实际控制棒位置与控制棒组设定点调整54提供的它们的预测设定点相比给出。
[0137]
在图8中,当在部分负荷下的等待时期t
pl
大于第二预定时间(例如大约30小时)时,使用第三子模式。第三子模式也可以被称为扩展低功率运行(elpo)模式。
[0138]
该第二预定时期(这里大约为30小时,但它可以更长,例如60小时)对应于必须考虑关于elpo的不同方面的时间:在长期部分负荷运行期间,d组应处于其“满负荷位置”以具有优化的燃料烧耗和关于芯块包壳相互作用(pci)的最佳调节堆芯。例如,第二预定时期至少为30小时。
[0139]
将在图8的帮助下说明第三子模式。第一线和第二线示出向初级回路中添加硼酸和去离子水的阶段。在这种情况下,硼酸和去离子水的量也被最小化,因为氙积累(在达到部分负荷后)被用于将d组拔出到“满负荷位置”。换言之,反应堆堆芯几乎没有控制棒。第三线示出随时间变化的氙浓度,第四线示出控制棒16的位置(它们插入反应堆堆芯中的厘米数),第五线示出随时间变化的核反应堆3的功率。
[0140]
在第三子模式中,与反应性平衡模块52的预测设定点相比,浮动/elpo模块56相对于控制棒设定值调整模块54具有优先权。在第三子模式中,浮动/elpo模块56通知控制棒组设定点调整模块54应使用第三子模式或elpo模式。根据实施方式,模块54在接收到应使用第三子模式或elpo的信息时命令控制棒16的设定值应是“满负荷位置”(接近没有控制棒或全功率位置))。因此,在核反应堆3的功率恒定的情况下,在控制棒到达满负荷位置之后,氙浓度由标准反应堆控制58通过bode注入来补偿(例如通过act控制间接地)。换言之,模块54
忽略反应性平衡模块52提供的设定点。
[0141]
在第一步骤中,将控制棒降低或插入反应堆堆芯中以减小核反应堆3的功率。在图8的例子中,功率被减小到全功率的75%。然后,氙浓度增加,将控制棒16从反应堆堆芯中拔出,以补偿由于氙浓度增加造成的反应性损失。控制棒16被移出反应堆堆芯,直到它们到达它们的“满负荷位置”(几乎没有控制棒)或平行地到达控制上限ucl。如果还需要进一步补偿氙浓度的增加,则向初级回路中添加一定量的去离子水,参见在6小时到8小时之间的氙浓度曲线图的最大值,参见附图标记62。当氙浓度在其最大值后降低时,总反应性增加并且通过标准反应堆控制58向初级回路5中添加硼酸,该硼酸由控制棒组设定点调整模块54的设定点“满负荷位置”和实际控制棒16的位置给出。根据实施方式,硼酸以不连续的方式添加。添加硼酸,直到达到氙浓度的平衡,即在图8中,在附图标记为64的时期期间,氙梯度几乎为零。
[0142]
在等待时期结束之前,控制棒16必须被移动到用于功率上升的预定控制棒设定点。因此,在等待时期结束之前的适当时间,通过接收到来自反应性平衡模块52的终止信号“达到时间标准”,在浮动/elpo子模块56中终止第三子模式或elpo模式。然后,反应性平衡模块52将控制棒16的设定点提供给控制棒组设定点调整模块54,其对应于上升之前的预定控制棒位置或设定点,并且标准反应堆控制58注入去离子水,这将控制棒16移动到控制棒设定值调整54提供的用于开始功率上升的预定控制棒设定点。在控制棒16移动到预定控制棒设定值期间,向初级回路5中添加去离子水,参见附图标记66。
[0143]
在这个第三子模式中,控制棒被移出反应堆堆芯,以由于芯块包壳相互作用(pci)使燃料棒均匀烧掉。
[0144]
根据由反应性平衡模块52基于初级冷却流体的反应性和混合物平衡提供的信号“达到时间标准”的产生,第三子模式或elpo子模式在等待时间结束之前的1小时到3小时之间终止。应说明的是,特别是在每个三级控制子模式中,控制棒16不超过调节下限lrl。调节下限lrl取决于核反应堆的实际功率pr。实际功率越高,调节下限越高,从而使核反应堆能够使用控制棒16随时停堆。
[0145]
根据实施方式,如上所述,反应性平衡模块52进一步基于预测的氙反应性和反应性系数模块40的反应性系数确定应终止浮动的还是elpo的三级控制模式。为此目的,反应性平衡模块52基于实际反应性系数确定预定控制棒设定点、实际控制棒16的位置和混合物平衡(根据上面提到的简化混合物公式(1)至(4))、使d组到达上升所需位置所需的注入时间。如果所需的注入时间加上容差大于剩余等待时间,则信号“达到时间标准”起作用并终止elpo或浮动模式。
[0146]
反应堆控制58也可以在没有预测的氙反应性值的情况下工作,也可以在没有模块52、56和38的情况下工作。在这种情况下,必须手动设置d型棒设定点。
[0147]
在图9中,以15小时的部分负荷时间为例示出了针对等待时间和上升时间中的每一个采用200个计算步骤的氙预测模块的准确度。图9从上到下示出了氙浓度、预测误差、控制棒或d型棒16的位置以及在使用第二子模式(浮动模式)的三级控制模式的例子中的反应堆功率,从该图9可以看出,预测误差随着等待时期结束的临近而减小。这是由于对氙反应性的预测的循环重复计算造成的,其利用了剩余等待时期。该误差与调节精度相比相当低。即使在等待时间的开始,这个计算误差也很小,值为10pcm。如果控制棒组的反应系数为
1.2pcm/cm,这与大约为8cm的控制棒组偏差相当。与在部分负荷下的控制棒的控制阈值30cm相比是微不足道的。
[0148]
图10示出了对于核反应堆运营商的可视化。可以在屏幕上提供可视化。除了开头讨论的反应性平衡箭头之外,可视化还示出了剩余等待时期以及设置与电网相关的子模式elpo还是浮动模式。此外,图10示出了pr目标功率,上升速率为2.1%/min(pg-grad=dpg/dt),这是从涡轮机控制得到的。“hd.sw-fkt.”是指在对反应堆控制的预测器影响应该被关掉,而“hd.swfkt.实际值”是控制棒16在反应堆控制中的真正有效值的情况下作为用于反应堆运营商的建议的控制棒16的手动设定点。
[0149]
根据一些实施方式,时间常数和控制强度带可适用于在选择的初级控制模式的情况下控制核反应堆。
[0150]
根据实施方式,用于氙预测的方法或算法能够使计算步骤最少化并且适用于选择的电网控制模式,以确定实现实时数字反应堆控制所需的预期上升阶段中的氙贡献。在实施方式中使用的方法允许所有电网相关控制模式(甚至作为对自身负荷的负荷拒绝(load rejection)的意外瞬变),包括通过串联氙计算的随机远程控制的负荷变化,实际氙和碘值的一次计算作为上升阶段的氙贡献的第二次预测性计算的基础。
[0151]
在一些实施例子中,本文描述的任何实施方式的任何特征可以与本文描述的任何其他实施方式的任何特征结合使用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。