一种浅层逆vsp初至层析及地层预测方法
技术领域
1.本发明涉及属于油气勘探地震资料处理技术领域,特别涉及一种浅层逆vsp初至层析及地层预测方法f。
背景技术:
2.垂直地震剖面法(vsp)是一种与地面地震采集不同的地震采集方法。该方法在地表上激发地震波,通过井孔中不同深度的接收点进行观测地震波。与地面地震相比,vsp观测的地震波具有衰减少、频率高、波形畸变小的优点,且接收点深度定位,能提高速度分析的精度。基于以上优点,vsp及其相关技术成为物探领域中的一大研究方向,并且广泛应用于能源、工程等领域。此外,vsp还衍生出了逆vsp、walkaway vsp等多种观测方式。与vsp相反,逆vsp就是在井中激发,地面接收的一种观测方式。该方法施工效率更高,且地面可全方位接收,扩大了区域的覆盖范围,增加了信息量。除以上特点外,vsp接收到的反射上行波可用于预测未钻遇地层,是钻探过程中非常有用的工具。
3.与传统vsp不同,浅层(逆)vsp是一种应用于近地表勘探的特殊vsp方法,钻孔较浅,测量深度在几十米到几百米之间,主要以构建精细准确的表层速度模型、研究地表衰减特征为目的,对确定激发井深、消除表层结构对构造成像和振幅的影响都具有重要的意义。该方法与微测井同属于井中地震范畴,且两者的野外施工方法一致,均为井中激发、地面接收。两者的不同之处在于,浅层逆vsp每次地下激发,地面多道接收,可获得更多的近地表信息,高信噪比的情况下应用上行波预测未钻地层的速度厚度,可以获得较厚的表层速度结构,并适用于表层结构横向变化的情况。
4.在实际应用中,近地表结构往往复杂(例如山前带),各向异性突出,干扰因素较多且影响严重,浅层逆vsp难以获取高信噪比的地震记录,数据处理困难。而且在浅层逆vsp实施过程中,为分辨薄地层或小尺度地质体,设计的激发深度间隔往往较小,使得相邻记录的走时差异较小,难以有效分离上下行波,进而难以预测下层信息。另一方面,常规vsp初至解释成果难以描述地下速度细节。
技术实现要素:
5.本发明的目的是针对浅层逆vsp记录信噪比偏低、常规解释结果不精细的问题,提出了一种浅层逆vsp初至层析及地层预测方法,实现在反射波信息难以应用的情况下应用初至走时信息进行近地表速度建模及地层预测的工作。
6.本发明的目的可通过如下技术措施来实现:该浅层逆vsp初至层析及地层预测方法包括:
7.步骤一,输入拾取的浅层逆vsp初至走时数据,以及激发点和接收点位置信息,设定反演参数;
8.步骤二,将初至走时数据进行网格化插值并计算各数据在激发点处的慢度垂向分量pz值;
9.步骤三,基于pz值将每一激发点的走时数据分类为直达波数据、折射波数据,若某激发点比相邻激发点存在更多折射数据,则线性拟合其折射数据,以斜率的倒数作为该处的下层速度;
10.步骤四,将近偏移距的直达波走时数据转化为垂向走时数据,并结合激发点深度以及步骤三提取出的层速度,约束反演井旁速度,并将结果水平外推,作为初始模型;
11.步骤五,基于当前模型进行初至波射线追踪,基于射线路径特征逐条判断射线是否符合实际情况,若不符,将该射线剔除;
12.步骤六,基于保留的射线和数据,构建反演方程组并求解得到模型更新量,更新模型;
13.步骤七,重复步骤五、六,判断走时残差是否小于设定的阈值,或达到最大反演迭代次数,若条件满足,则终止迭代,并获得反演模型;
14.步骤八,基于反演模型,将对应最深激发点的折射波进行反向追踪,直到最深激发点相等的深度,并求得实际走时与该路径走时之差;
15.步骤九,对步骤八中的走时差进行筛选,剔除异常数据,进行折射解释,若折射速度大于最深激发点处的速度且延迟时间大于零,则计算出下一层的速度和深度。
16.步骤十,基于步骤九所得的预测信息,对结果填充、平滑,输出最终速度模型。
17.进一步,在步骤一中,设定的反演参数包括最大反演深度、最大反演迭代次数、反演速度网格大小、平滑约束权重速度阈值、走时残差阈值。
18.进一步,在步骤二中,以激发深度为纵向坐标,以接收点水平位置为横向坐标,将初至走时数据进行网格化插值并通过纵向差分方式计算激发点处的慢度垂向分量pz值。
19.进一步,在步骤三中,以pz值为负的走时数据作为折射波数据,其他数据作为直达波数据。
20.进一步,在步骤五中,实现初至波射线追踪过程中,首先采用快速扫描法计算地下走时场,之后从各检波点进行反向追踪,得到射线路径。
21.进一步,在步骤五中,直达波射线路径的最低点应位于激发点处,折射波的路径则不然,依据此特征,判别射线是否与实际数据相符合。
22.进一步,在步骤六中,构建的方程组如下:
[0023][0024]
其中,
[0025]
a为由保留射线计算得出的矩阵,元素为射线在模型网格内的长度,
[0026]
ε为平滑权重系数,
[0027]
δs为模型更新量,
[0028]
l为由拉普拉斯算子构成的平滑矩阵,
[0029]
δt为拾取的初至走时数据与正演走时的残差,
[0030]
上式采用sirt算法进行求解。
[0031]
进一步,在步骤八中,基于检波点的走时,通过横向差分方式计算慢度水平分量p
x
,以检波点为起始位置,基于程函方程计算射线方向,并进行初值射线追踪。
[0032]
进一步,在步骤九中,折射速度可通过线性拟合走时差得到,以延迟时间与最深激
发点速度的乘积作为最深激发点到下层的距离。
[0033]
本发明通过浅层逆vsp初至层析及地层预测方法实现在浅层逆vsp记录信噪比低的情况下实现精细近地表速度建模和地层预测工作,所得结果包含近地表速度横纵向变化细节,便于进行估计最佳激发深度、研究地表衰减、静校正等采集处理工作。应用这种方法,提高了结果的可信度和分辨率,增强了浅层vsp的实用性,并具有广阔的应用前景。
附图说明
[0034]
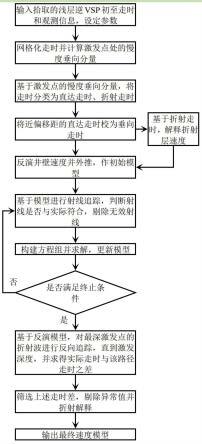
图1为本发明实施例浅层逆vsp初至层析及地层预测方法的流程图;
[0035]
图2为浅层逆vsp记录显示图,其中,图2(a)为激发点深30m处的记录图,图2(b)为激发点深1m处的记录图;
[0036]
图3为网格化后的初至波走时及激发点慢度的垂向分量显示图,其中,图3(a)为网格化后的初至波走时图,图3(b)为激发点慢度的垂向分量显示图;
[0037]
图4为井壁速度曲线显示图;
[0038]
图5为第20次迭代反演的射线追踪路径图;
[0039]
图6为本发明实施例浅层逆vsp初至层析及地层预测方法的最终结果显示图;
[0040]
图7为浅层逆vsp记录的常规解释结果显示图。
具体实施方式
[0041]
本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
[0042]
如图1所示,为本发明实施例浅层逆vsp初至层析及地层预测方法的流程图。图2为本发明实施例所采用的浅层逆vsp记录,其中图2(a)为30m激发的地震记录,图2(b)为1m激发的地震记录。所示的地震记录信噪比低,同相轴杂乱,难以识别反射波,但初至波信息较为清楚,可拾取其走时信息,作为实施数据。
[0043]
步骤一,输入拾取的浅层逆vsp初至走时数据,以及激发点和接收点位置信息,设定反演参数。
[0044]
作为本发明实施例的一个具体示例,设定的反演参数包括最大反演深度(40m)、最大反演迭代次数(20次)、反演速度网格大小(1m)、平滑约束权重(0.5)、速度阈值(最小为0.2km/s,最大为4km/s)、走时残差阈值(0.5ms)。
[0045]
步骤二,将初至走时数据进行网格化插值并计算各数据在激发点处的慢度垂向分量pz值;
[0046]
如图3所示,以激发深度为纵向坐标,以接收点水平位置为横向坐标,将初至走时数据进行网格化插值,结果如图3(a)所示,并通过纵向差分方式计算各数据在激发点处的慢度垂向分量pz值,结果如图3(b)所示。
[0047]
步骤三,基于pz值将每一激发点的走时数据分类为直达波数据、折射波数据,若某激发点比相邻激发点存在更多折射数据,则线性拟合其折射数据,以斜率的倒数作为该处的下层速度;
[0048]
本发明实施例中,以pz值为负的走时数据作为折射波数据,其他数据作为直达波
数据。分类过程中,深度0m~4m、5m、8m、14.5m、19m、21m处存在较多折射数据,则线性拟合5m以下各层折射数据,以斜率的倒数作为该处的下层速度,分别是1540m/s、1590m/s、1680m/s、1670m/s、1760m/s,其中,14.5m和21m处的折射特征明显,下层应为高速层。
[0049]
步骤四,将近偏移距的直达波走时数据转化为垂向走时数据,并结合激发点深度以及步骤三提取出的层速度,约束反演井旁速度,并将结果水平外推,作为初始模型。
[0050]
本发明实施例中,如4所示为初始模型结果示意图。
[0051]
步骤五,基于当前模型进行初至波射线追踪,基于射线路径特征逐条判断射线是否符合实际情况,若不符,将该射线剔除。
[0052]
具体地,在本发明实施例中,基于当前模型,首先采用快速扫描法计算地下走时场,之后从各检波点进行反向追踪,得到射线路径,如图5所示。实际中,折射波的路径的最低点不在炮检点位置。基于此特征,判断对应直达/折射数据的正演射线是否真正符合直达/折射射线特征,若不相符则剔除该射线,以降低反演误差。
[0053]
步骤六,基于保留的射线和数据,构建反演方程组并求解得到模型更新量,更新模型。
[0054]
具体地,在本发明实施例中,构建的方程组如下形式:
[0055][0056]
其中,
[0057]
a为由保留射线计算得出的矩阵,元素为射线在模型网格内的长度,
[0058]
ε为平滑权重系数,
[0059]
δs为模型更新量,
[0060]
l为由拉普拉斯算子构成的平滑矩阵,
[0061]
δt为拾取的初至走时数据与正演走时的残差,
[0062]
上式采用sirt算法进行求解。
[0063]
步骤七,重复步骤五、六,判断走时残差是否小于设定的阈值,或达到最大反演迭代次数,若条件满足,则终止迭代,并获得反演模型。
[0064]
步骤八,基于反演模型,将对应最深激发点的折射波进行反向追踪,直到最深激发点相等的深度,并求得实际走时与该路径走时之差。
[0065]
在本发明实施例中,基于检波点的走时,通过横向差分方式计算慢度水平分量p
x
,以检波点为起始位置,基于程函方程计算射线方向,并进行初值射线追踪。
[0066]
步骤九,对步骤八中的走时差进行筛选,剔除异常数据,进行折射解释,若折射速度大于最深激发点处的速度且延迟时间大于零,则计算出下一层的速度和深度。
[0067]
在本发明实施例中,对步骤八中的走时差进行筛选,剔除异常数据,进行折射解释,拟合得到的折射速度和延迟时间分别为3100m/s、1.65ms,激发点速度为2110m/s,计算激发点到下层的距离约为3.5m。
[0068]
步骤十,基于步骤九所得的预测信息,对结果填充、平滑,输出最终速度模型,如图6所示。
[0069]
图7展示的是浅层逆vsp记录的常规解释结果。解释成果将近地表划分为三层:第一层速度为0.39km/s,厚度为2.0m;第二层速度为0.72km/s,厚度为5.0m;第三层速度为
1.6km/s。对比图6、图7的两幅结果可知,图7的解释成果最大深度仅为30m,速度变化在0.39km/s与1.6km/s之间,且无法描述层内的精细速度变化,尤其是第三层内的走时突变。常规浅层vsp解释方法一大问题是将初至波均作为直达波处理,而忽视了折射波的存在,这势必会向解释结果中引入误差,降低了结果的可靠性。图6展示了本方法计算的连续速度模型,速度在0.4km/s与3.1km/s之间变化,变化范围明显大于常规解释结果,且模型中能清晰看到有两个高速层存在,模型的横向也存在一定变化,最大解释深度达到了33.5m,整体展示出了比常规解释结果更为丰富的近地表信息,且与实际情况更相符。
[0070]
以上所述仅为本发明的较佳实施例而己,并不以本发明为限制,凡在本发明的精神和原则之内所作的均等修改、等同替换和改进等,均应包含在本发明的专利涵盖范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。