1.本实用新型涉及钢铁智能生产应用领域,尤其涉及一种铁皮渣处理系统。
背景技术:
2.在旧有的连铸车间或者轧钢车间生产过程中,冲渣水将产生的氧化铁皮渣由传统的铁皮坑进行沉淀,沉淀后的氧化铁皮渣通过铁皮坑上部设置的抓斗吊车人工抓渣送至渣场,目前,部分钢厂仍有相当多的铁皮坑实际运行。铁皮坑抓渣采用抓斗吊车人工抓渣,由于铁皮坑面积较大,底部无刮渣装置,铁皮渣在铁皮坑内散布状态,渣量分布不均匀,人工抓渣效率低下,且抓渣现场水蒸汽弥漫,环境恶劣,长期现场工作将对人体健康带来危害。
技术实现要素:
3.鉴于以上现有技术存在的问题,本实用新型提出一种铁皮渣处理系统,主要解决现有抓渣操作依赖于人工,工作效率低且工作环境恶劣影响人体健康的问题。
4.为了实现上述目的及其他目的,本实用新型采用的技术方案如下。
5.一种铁皮渣处理系统,包括:铁皮坑、渣池、用于探测所述铁皮坑中铁皮渣分布信息和位置信息的探测仪、用于搭载所述探测仪并进行自动巡航的的无人船,用于将所述铁皮坑中的铁皮渣转移到所述渣池中的抓斗吊车以及用于输出控制指令控制所述抓斗吊车执行抓取动作的控制终端;
6.搭载有所述探测仪的所述无人船置于所述铁皮坑内,所述探测仪的输出端与所述控制终端的输入端连接;所述控制终端的输出端与所述抓斗吊车的信号接收端连接。
7.可选地,所述铁皮坑为方形结构,所述方形结构的底面为斜面,所述铁皮渣沉积在所述铁皮坑的底部。
8.可选地,所述抓斗吊车的抓斗上安装有定位模块和高度测量模块。
9.可选地,所述探测仪包括多波束探测器,所述多波束探测器安装于所述无人船下方。
10.可选地,还包括用于采集所述渣池区域图像的图像采集模块,所述图像采集模块的输出端与所述控制终端的输入端连接。
11.可选地,所述无人船包括船体、驱动模块和用于控制所述船体按照指定路线进行巡航行驶的巡航模块,所述驱动模块和所述巡航模块安装于所述船体上,所述驱动模块与所述巡航模块连接,所述巡航模块与所述控制终端建立无线连接。
12.可选地,所述驱动模块包括电池组、电量检测单元以及电量报警单元,所述电量检测单元与所述电池组连接,所述电量报警单元与所述电量检测单元连接。
13.可选地,所述控制终端包括:用于识别所述渣池中剩余空间大小的识别模块以及用于输出控制指令控制所述抓斗吊车行进和抓取的处理器,所述识别模块的输入端与所述图像采集模块的输出端连接;所述识别模块的输出端与所述处理器的输入端连接,所述处理器的输出端与所述抓斗吊车的信号接收端连接。
14.可选地,所述电量报警单元包括指示灯、声光报警器或蜂鸣器。
15.可选地,所述铁皮坑的一侧设置有进水渠,铁皮渣通过所述进水渠导入所述铁皮坑;所述铁皮坑靠近所述渣池,且所述渣池与所述进水渠位于所述铁皮坑的不同侧。
16.如上所述,本实用新型提供一种铁皮渣处理系统,具有以下有益效果。
17.通过抓斗吊车、控制终端以及抓渣现场探测仪的配合,实现自动化的抓渣作业,减少人工参与,提高抓渣效率。
附图说明
18.图1为本实用新型一实施例中铁皮渣处理系统的模块图。
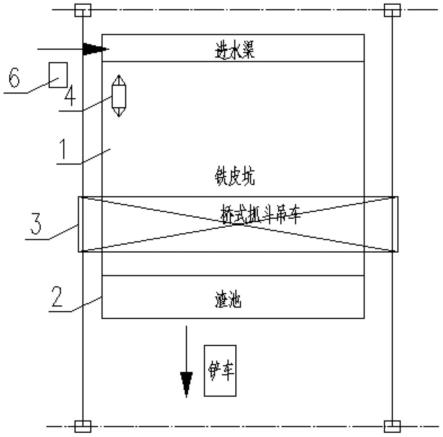
19.图2为本实用新型一实施例中铁皮渣处理系统应用场景的剖面图。
具体实施方式
20.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
21.需要说明的是,以下实施例中所提供的图示仅以示意方式说明本实用新型的基本构想,遂图式中仅显示与本实用新型中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
22.请参阅图1和图2,本实用新型提供一种铁皮渣处理系统,包括铁皮坑1、渣池2、用于探测所述铁皮坑1中铁皮渣分布信息和位置信息的探测仪5、用于搭载所述探测仪5并进行自动巡航的的无人船4,用于将所述铁皮坑1中的铁皮渣转移到所述渣池2中的抓斗吊车3以及用于输出控制指令控制所述抓斗吊车3执行抓取动作的控制终端;搭载有所述探测仪5的所述无人船4置于所述铁皮坑1内,所述探测仪5的输出端与所述控制终端的输入端连接;所述控制终端的输出端与所述抓斗吊车3的信号接收端连接。
23.在一实施例中,所述铁皮坑1的一侧设置有进水渠,铁皮渣通过所述进水渠导入所述铁皮坑1;所述铁皮坑1靠近所述渣池2,且所述渣池2与所述进水渠位于所述铁皮坑1的不同侧。示例性地,进水渠、铁皮坑1和渣池2顺次排列如图1所示。抓斗吊车3可采用桥式抓斗吊车3,桥式抓斗吊车3横跨在铁皮坑1或渣池2上方。在另一实施例中,抓斗吊车3也可设置与铁皮坑1或渣池2侧方,沿侧方移动完成抓渣及转运动作。具体设置可根据实际应用场景进行调整,这里不作限制。
24.在一实施例中,铁皮坑1可设置为方形结构,方形结构的底面为斜面,铁皮渣沉积在所述铁皮坑1的底部,在另一实施例中,铁皮坑1地面也可设置为平面,沉淀物为钢渣或类似钢渣性质的泥渣。通过抓斗吊车3从铁皮坑1中抓取沉淀物并转运到渣池2中。
25.在一实施例中,抓斗吊车3的抓斗上安装有定位模块和高度测量模块,定位模块可采用定位传感器,高度测量模块可采用高度传感器,通过传感器实时反馈抓斗位置和高度,将检测值反馈为控制终端。通过控制终端控制抓斗吊车3的行进和抓取动作。
26.在一实施例中,可在渣池2周围安装图像采集模块,通过图像采集模块采集渣池2区域图像,并将渣池2区域图像反馈给控制终端。其中图像采集模块可采用高清摄像头。
27.为了准确获取铁皮坑1中铁皮渣的位置和分布,将探测仪5安装在无人船4下方,将无人船4置于铁皮坑1中。探测仪5可采用多波束探测器。无人船4搭载的探测仪5将铁皮坑1中氧化铁皮渣的分布信息和位置信息反馈给控制终端。同时高清摄像头将渣池2内的渣图像信息反馈给控制终端,通过控制终端6识别渣池2中氧化铁皮渣的信息后,发出指令给抓斗吊车3,通过抓斗吊车3将氧化铁皮渣抓到渣池2中。
28.在一实施例中,无人船4包括船体、驱动模块和用于控制所述船体按照指定路线进行巡航行驶的巡航模块,所述驱动模块和所述巡航模块安装于所述船体上,所述驱动模块与所述巡航模块连接,所述巡航模块与所述控制终端建立无线连接。巡航模块可集成常规巡航避障算法,从控制终端读取预设的巡航路径,根据控制终端接收的探测仪5得到的铁皮坑1环境分布,按预设路径控制驱动模块驱动无人船4进行自动巡航、自动避障等作业。具体巡航避障算法为现有技术,这里不作限制。
29.在一实施例中,所述驱动模块包括电池组、电量检测单元以及电量报警单元,所述电量检测单元与所述电池组连接,所述电量报警单元与所述电量检测单元连接。
30.在一实施例中,电量报警单元包括指示灯、声光报警器或蜂鸣器等,在检测到电池组电量低于设定值后,启动报警,提醒相关工作人员更换电池组或对电池组充电。电量检测单元可采用常规的比较器,读取电池组电量与预设电量进行比较,得到比较结果。
31.在一实施例中,控制终端包括:用于识别所述渣池2中剩余空间大小的识别模块以及用于输出控制指令控制所述抓斗吊车3行进和抓取的处理器,所述识别模块的输入端与所述图像采集模块的输出端连接;所述识别模块的输出端与所述处理器的输入端连接,所述处理器的输出端与所述抓斗吊车3的信号接收端连接。
32.具体地,识别模块可集成常规的图像识别网络模型如卷积神经网络模型、bp神经网络模型,通过现有的网络模型识别图像中铁渣的过程为现有技术,这里不再赘述。处理器可采用mcu等微处理器芯片。识别渣池2中铁渣,并通过处理器确定渣池2中剩余空间大小后,可输出控制指令控制抓斗吊车3将铁皮渣抓取到渣池2的富余空间中。
33.在一实施例中,无人船4、吊车和控制终端可通过无线通讯模块建立通讯连接。
34.铁皮坑1将轧制过程中产生的氧化铁皮渣沉淀在铁皮坑1底部,无人船4搭载的测深仪将铁皮坑1氧化铁皮渣的分布信息和位置信息反馈给智能控制装置,同时高清摄像头将渣池2内的渣图像信息反馈给智能控制装置,通过智能控制装置智能识别渣池2中氧化铁皮渣的信息后,发出指令给抓斗吊车3,通过抓斗吊车3将氧化铁皮渣抓到渣池2中。停止抓渣后,吊车复位到初始位置,进入下一个循环。
35.综上所述,本实用新型一种铁皮渣处理系统,通过无人船、抓斗吊车以及控制终端之间的配合,自动完成铁皮渣抓取和转运,提高抓渣过程的自动化水平,减少人工参与,提高抓渣效率,降低钢厂运行成本。所以,本实用新型有效克服了现有技术中的种种缺点而具高度产业利用价值。
36.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精
神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。