1.实施方式涉及基板,并且更具体地,涉及用于能够相对于透镜镜筒进行相对移动的图像传感器的基板。
背景技术:
2.通常,摄像装置除了安装在诸如移动通信终端和mp3播放器的便携式设备之外,还安装在汽车、内窥镜和诸如cctv的电子设备上。这样的摄像装置已经逐渐着眼于高像素地进行开发,并且被小型化和薄型化。不仅如此,当前的摄像装置正在改变,使得能够以低生产成本实现各种附加功能。
3.上述摄像装置包括:透镜镜筒,其用于容纳透镜;透镜保持器,其与透镜镜筒耦接;图像传感器,其被设置在透镜保持器中;以及驱动基板,其上安装有图像传感器。在这种情况下,透镜将被摄体的图像信号发送至图像传感器。然后,图像传感器将视频信号转换成电信号。
4.这里,根据被定义为透镜与图像传感器之间的距离的焦距来确定摄像装置处的视频信号的准确度。
5.因此,摄像装置通过使透镜镜筒相对于图像传感器移动来提供焦距校正或抖动补偿。即,在摄像装置中,使容纳透镜的透镜镜筒相对于图像传感器在x轴、y轴和z轴上移动。此时,摄像装置需要至少六个弹性构件(例如,弹簧)来相对地移动透镜镜筒。另外,每个弹性构件通过如接合的方法与透镜镜筒耦接。
6.然而,如上所述的根据现有技术的摄像装置由设置在透镜镜筒上方的上弹簧板、设置在透镜镜筒下方的下弹簧板、以及诸如由于透镜镜筒的相对移动而用于固定z轴的弹性线的结构构成,并且因此存在摄像装置的模块结构复杂的问题。
7.另外,根据现有技术的摄像装置需要多个弹性构件以用于移动透镜镜筒,并且因此存在多个弹性构件的组装工序的数目增加的问题。
技术实现要素:
8.技术问题
9.实施方式提供了具有新结构的基板、传感器驱动装置和包括其的摄像模块。
10.另外,实施方式提供了使得图像传感器能够相对于透镜镜筒移动的基板、传感器驱动装置和包括其的摄像模块。
11.另外,实施方式提供了不仅能够进行x轴、y轴和z轴的移动,而且还能够进行倾斜校正的基板、传感器驱动装置和包括其的摄像模块。
12.另外,实施方式提供了能够简化用于提供自动对焦功能和手抖校正功能的弹簧结构的基板、传感器驱动装置和包括其的摄像模块。
13.另外,实施方式提供了能够通过将线簧添加至用作与图像传感器的电连接的片簧结构来抑制在图像传感器移动时发生的倾斜的基板、传感器驱动装置和包括其的摄像模
块。
14.要由所提出的实施方式解决的技术问题不限于以上提及的技术问题,并且根据以下描述所提出的实施方式所属领域的技术人员可以清楚地理解未提及的其他技术问题。
15.技术解决方案
16.根据实施方式的基板包括:绝缘层;第一图案部,其被设置在绝缘层上;以及第二图案部,其被设置在绝缘层上并且与第一图案部间隔开,其中,绝缘层包括:第一绝缘部,其包括第一开口区域;以及第二绝缘部,其被设置成围绕第一绝缘部的外部并且利用它们之间的第二开口区域与第一绝缘部间隔开;其中,第一图案部包括:第一引线图案部,其被设置在第一绝缘部上;第二引线图案部,其被设置在第二绝缘部上;以及连接图案部,其具有连接至第一引线图案部的一端和连接至第二引线图案部的另一端,并且被设置在第二开口区域上;其中,连接图案部包括位于第二开口区域的角上的弯折部。
17.另外,第一图案部是信号传输图案,并且第二图案部是与第一图案部物理地分开的加强图案。
18.另外,第一引线图案部沿第一方向设置在第一绝缘部上,并且第二引线图案部沿与第一方向正交的第二方向设置在第二绝缘部上。
19.另外,连接图案部的长度大于第一引线图案部与第二引线图案部之间的直线距离。
20.另外,连接图案部的长度大于第二开口区域的宽度。
21.另外,连接图案部的长度具有第一绝缘部的外侧与第二绝缘部的内侧之间的直线距离的1.5倍至20倍的范围。
22.另外,连接图案部被设置成浮置在第二开口区域上。
23.另外,第一引线图案部包括:第一-第一引线图案部,其被设置在第一绝缘部上;以及第一-第二引线图案部,其从第一部向内延伸并且被设置在第一开口区域上。
24.另外,第二引线图案部包括:第二-第一引线图案部,其被设置在第二绝缘部上;以及第二-第二引线图案部,其从第二-第一引线图案部向外延伸并且不与第二绝缘部接触。
25.另外,连接图案部的线宽小于第一引线图案部或第二引线图案部的线宽。
26.另外,连接图案部包括连接至第一引线图案部的一端和连接至第二引线图案部的另一端,并且该一端和另一端中的每一个的侧表面具有弯曲表面。
27.另外,该一端和另一端中的每一个的侧表面的曲率(r)具有30与100之间的范围。
28.另外,第二图案部包括:第一加强图案,其被设置在第一绝缘部上并与第一引线图案部间隔开;第二加强图案,其被设置在第二绝缘部上并与第二引线图案部间隔开;以及第三加强图案,其被设置在第二开口区域上,以连接在第一加强图案与第二加强图案之间,并且与连接图案部间隔开。
29.另外,第二加强图案包括:第二-第一加强图案部,其被设置在第二绝缘部上;以及第二-第二加强图案部,其从第一部延伸并且被设置在第二绝缘部的外部,并且不与第二绝缘部接触。
30.另外,第二-第二加强图案部包括至少一个耦接孔。
31.另外,绝缘层包括设置在第二开口区域上并且与连接图案部接触的第三绝缘部。
32.另外,第三绝缘部被设置在第二开口区域的角上以接触连接图案部的弯折部。
33.另外,第三绝缘部与第一绝缘部和第二绝缘部物理地分开。
34.另外,根据实施方式的传感器驱动装置包括:保持器部,其包括保持器、耦接至保持器的磁体部以及设置在保持器上的阻尼板;固定部,其包括包含第一端子部的第一基板;线圈移动基板,其包括线圈部和传感器,该线圈部与固定部间隔开并且面对磁体部;第四基板,其包括连接至线圈移动基板部的移动部和连接至第一基板的固定部,该第四基板通过由磁体部和线圈部产生的电磁力移动传感器;以及线,其具有连接至固定部的阻尼板的一端和连接至线圈移动基板的另一端,并且弹性地支承线圈移动基板。
35.另外,第四基板包括绝缘层和设置在绝缘层上的第一图案部,其中,绝缘层可以包括第一绝缘部和第二绝缘部,第一绝缘部包括第一开口区域,第二绝缘部被设置成围绕第一绝缘部的外侧并且利用它们之间的第二开口区域与第一绝缘部间隔开;其中,第一图案部包括设置在第一绝缘部上的第一引线图案部、设置在第二绝缘部上的第二引线图案部、以及一端连接至第一引线图案部且另一端连接至第二引线图案部并且被设置在第二开口区域上的连接图案部,其中,连接图案部包括位于第二开口区域的角上的弯折部。
36.另外,第一引线图案部包括:第一-第一引线图案部,其被设置在第一绝缘部上;以及第一-第二引线图案部,其从第一部向内延伸并且被设置在第一开口区域上并且连接至线圈移动基板的第二端子部,并且其中,第二引线图案部包括:第二-第一引线图案部,其被设置在第二绝缘部上;以及第二-第二引线图案部,其从第二-第一引线图案部向外延伸、不与第二绝缘部接触、并且连接至第一基板的第一端子部。
37.另外,传感器驱动装置还包括其上设置有传感器的传感器基板,并且线圈移动基板包括其中设置有传感器基板的开口。
38.另外,保持器和线圈移动基板中的每一个包括通孔,该通孔沿光轴方向对准并且线穿过该通孔。
39.发明的效果
40.在实施方式中,将图像传感器部与第一基板电连接的第四基板的连接图案部被浮置并且被设置在绝缘层上,同时具有弹簧结构。在这种情况下,连接图案部用作用于在图像传感器部与第一基板之间发送信号的电路,并且用作用于使图像传感器部中包括的图像传感器基于x轴、y轴和z轴移动的弹簧。因此,根据实施方式的摄像模块可以去除诸如移动图像传感器所需的弹簧板的结构,并且可以通过排除与弹簧板有关的过程来推进制造过程。
41.另外,当设置具有弹簧功能的连接图案部时,连接图案部不连接在第一引线图案部和设置在与设置有第一引线图案部的区域相对的区域中的第二引线图案部之间,而是连接在设置在与设置有第一引线图案部的区域相交的区域中的第二引线图案部之间。为此,实施方式的连接图案部具有在图像传感器的倾斜方向上旋转的形式并且被设置。因此,可以使用连接图案部稳定地执行实施方式中的图像传感器的倾斜操作。
42.另外,实施方式中的第四基板包括绝缘层和设置在绝缘层上的连接图案部,并且绝缘层包括设置在与连接图案部竖直交叠的区域的至少一部分中的第三绝缘部。因此,摄像模块可以使图像传感器相对于透镜镜筒移动,同时更稳定地弹性支承图像传感器。
43.另外,实施方式中的连接图案部的长度为彼此面对的第一引线图案部与第二引线图案部之间的直线距离的至少1.5倍与20倍之间。因此,可以在提高图像传感器基板的移动性的同时使噪声产生最小化。
44.另外,实施方式中的第二致动器包括可以解决倾斜问题的连接线。连接线在第二致动器中用作支承件而不是电连接,并且当驱动第二致动器时可能发生的图像传感器部在z轴上的倾斜现象被抑制。因此,连接线与第四基板的连接图案部一起被附加地设置,从而抑制当图像传感器部移动时发生的倾斜现象,并且从而提高操作可靠性。
附图说明
45.图1是示出根据比较示例的摄像模块的视图。
46.图2是根据本实施方式的摄像装置的透视图。
47.图3是沿图2的线a-a'截取的剖视图。
48.图4是根据本实施方式的摄像装置的分解透视图。
49.图5是根据实施方式的第二致动器的分解透视图。
50.图6是图5中示出的保持器的分解透视图。
51.图7是示出图6中示出的阻尼板的视图。
52.图8是图5中示出的第一基板的透视图。
53.图9是图5中示出的线圈移动基板部的分解透视图。
54.图10是图9中示出的线圈移动基板部的第二基板的底视图。
55.图11的(a)是图9中示出的线圈移动基板部的第三基板的平面图。
56.图11的(b)是图9中示出的线圈移动基板部的第三基板的底视图。
57.图12是根据实施方式的第二基板和第三基板的耦接图。
58.图13是图5中示出的第四基板的分解透视图。
59.图14a是图5中示出的第四基板的平面图。
60.图14b是图5中示出的第四基板的底视图。
61.图14c是第四基板的部分区域的放大图。
62.图15是根据实施方式的图像传感器模块400的分解透视图。
63.图16a是用于通过根据本实施方式的摄像装置的一些配置来说明x轴方向移位驱动的视图。
64.图16b是用于通过根据本实施方式的摄像装置的一些配置来说明y轴方向移位驱动的视图。
65.图16c是用于通过根据本实施方式的摄像装置的一些配置来说明z轴旋转驱动的视图。
66.图17是示出根据本实施方式的摄像装置的磁体与线圈之间的磁流和洛伦兹力的视图。
67.图18的(a)是示出根据比较示例的摄像模块的可靠性评估结果的视图,以及图18的(b)是示出根据实施方式的摄像模块的可靠性评估结果的视图。
具体实施方式
68.在下文中,将参照附图详细描述本发明的实施方式。
69.然而,本发明的主旨和范围不限于所描述的实施方式的一部分,并且可以以各种其他形式来实现,并且在本发明的主旨和范围内,可以选择性地组合和替换实施方式的元
件中的一个或更多个。
70.另外,除非明确地另外定义和描述,否则本发明的实施方式中使用的术语(包括技术术语和科学术语)可以解释为与本发明所属领域中的普通技术人员通常理解的含义相同的含义,并且诸如在常用词典中定义的那些术语的术语可以解释为具有与其在相关技术的上下文中的含义一致的含义。此外,在本发明的实施方式中使用的术语用于描述实施方式并且并不旨在限制本发明。
71.在本说明书中,单数形式也可以包括复数形式,除非在短语中特别说明,并且单数形式当以“a(和)、b和c中的至少一个(或更多个)”描述时可以包括可以以a、b和c组合的所有组合中的至少一个。此外,在描述本发明的实施方式的元件时,可以使用诸如第一、第二、a、b、(a)和(b)的术语。
72.这些术语仅用于区分元件与其他元件,并且术语不限于本质、顺序或元件的顺序。另外,当元件被描述为“连接”、“耦接”或“接触”至另一元件时,其不仅可以包括元件直接“连接”至、“耦接”至或“接触”至其他元件的情况,而且还可以包括元件通过该元件与其他元件之间的其他元件“连接”、“耦接”或“接触”的情况。
73.另外,当被描述为形成或设置在每个元件的“上(上方)”或“下(下方)”时,“上(上方)”或“下(下方)”不仅可以包括两个元件直接彼此连接的情况,而且还可以包括在两个元件之间形成或设置一个或更多个其他元件的情况。此外,当表达为“上(上方)”或“下(下方)”时,不仅可以包括基于一个元件的向上方向,而且还可以包括向下方向。
74.在下文中,将参照附图详细描述本公开内容的实施方式。
75.图1是示出根据比较示例的摄像模块的视图。
76.具有光学图像稳定器(ois)功能和自动对焦(af)功能的摄像模块需要至少两个弹簧板。
77.根据比较示例的摄像模块可以具有两个弹簧板。根据比较示例的摄像模块需要诸如至少六个弹簧的弹性构件用于弹簧板。
78.参照图1,根据比较示例的摄像模块包括光学系统,该光学系统包括透镜组件、红外截止滤光器和传感器单元。即,根据比较示例的摄像模块包括:透镜镜筒10、透镜组件20、第一弹性构件31、第二弹性构件32、第一壳体41、第二壳体42、红外截止滤光器50、传感器单元60、电路板80和驱动器71、72、73和74。
79.在这种情况下,透镜镜筒10连接至第一壳体41。即,透镜镜筒10经由第一弹性构件31连接至第一壳体41。即,透镜镜筒10以可通过第一弹性构件31移动的方式连接至第一壳体41。在这种情况下,第一弹性构件31包括多个弹簧(未示出)。例如,第一弹性构件31在透镜镜筒10的多个点处连接在透镜镜筒10与第一壳体41之间。
80.第二弹性构件32连接至第一壳体41和容纳第一壳体41的第二壳体42。第二弹性构件32将第一壳体41固定至第二壳体42以便可移动。第二弹性构件32包括多个弹簧。详细地,第二弹性构件32包括板状弹簧。
81.在这种情况下,第一弹性构件31在支承透镜镜筒10的同时使透镜镜筒10在竖直方向(z轴方向)上相对于传感器单元60移动。为此,第一弹性构件31包括至少四个弹簧。
82.另外,第二弹性构件32在支承透镜镜筒10的同时使透镜镜筒10在水平方向(x轴方向和y轴方向)上相对于传感器单元60移动。为此,第二弹性构件32包括至少两个弹簧。
83.如上所述,在根据比较示例的摄像模块中,在透镜镜筒10在x轴、y轴和z轴方向上移动时执行ois和af。为此,根据比较示例的摄像模块需要至少六个诸如弹簧的弹性构件。另外,根据比较示例的摄像模块需要两个弹簧板以用于如上所述地支承弹性构件。此外,根据比较示例的摄像模块需要附加构件,例如,用于固定透镜镜筒10的z轴的弹性线。因此,根据比较示例的摄像模块具有用于使透镜镜筒在x轴、y轴和z轴方向上移动的复杂弹簧结构。
84.另外,在根据比较示例的摄像模块中,需要手动执行接合各个弹性构件的操作以将弹性构件与透镜镜筒10耦接。因此,根据比较示例的摄像模块具有复杂的制造过程并且需要较长的制造时间。
85.另外,根据比较示例的摄像模块提供透镜镜筒10的倾斜功能,但是具有基本上难以进行图像的倾斜校正的结构。即,即使透镜镜筒10相对于传感器单元60旋转,入射在传感器单元60上的图像也不会改变,并且因此图像的倾斜校正是困难的,并且此外,倾斜功能本身是不必要的。
86.在下文中,将描述根据实施方式的用于图像传感器的基板、摄像模块和包括其的摄像装置。
87.下面使用的“光轴方向”被定义为耦接至透镜驱动装置的透镜和/或图像传感器的光轴方向。
88.下面使用的“竖直方向”可以是平行于光轴方向的方向。竖直方向可以对应于“z轴方向”。下面使用的“水平方向”可以是垂直于竖直方向的方向。即,水平方向可以是垂直于光轴的方向。因此,水平方向可以包括“x轴方向”和“y轴方向”。
89.下面使用的“自动对焦功能”被定义为这样的功能:用于通过根据被摄体的距离调整距图像传感器的距离并且在光轴方向上移动透镜来自动调整被摄体上的焦点,使得可以在图像传感器上获得被摄体的清晰图像。同时,“自动对焦”可以对应于“af(自动对焦)”。
90.下面使用的“摄像抖动校正功能”被定义为这样的功能:移动透镜和/或图像传感器以抵消由外力导致的在图像传感器中产生的振动(移动)。同时,“摄影抖动校正功能”可以对应于“光学图像稳定(ois)”。
91.图2是根据本实施方式的摄像装置的透视图,图3是沿图2的线a-a'截取的剖视图,以及图4是根据本实施方式的摄像装置的分解透视图。
92.实施方式中的摄像装置可以包括摄像模块。摄像装置可以包括透镜驱动装置。这里,透镜驱动装置可以是音圈电机(vcm)。透镜驱动装置可以是透镜驱动电机。透镜驱动装置可以是透镜驱动致动器。透镜驱动装置可以是第一致动器。摄像装置可以包括传感器驱动装置。这里,传感器驱动装置可以是音圈电机。传感器驱动装置可以是传感器驱动电机。传感器驱动装置可以是传感器驱动致动器。传感器驱动装置可以是第二驱动器。
93.这里,透镜驱动装置可以包括af模块。
94.另外,传感器驱动装置可以包括ois模块。
95.《摄像装置》
96.摄像装置可以包括透镜模块100。
97.透镜模块100可以包括透镜和透镜镜筒。透镜模块100可以包括透镜和透镜镜筒。透镜模块100可以包括一个或更多个透镜和能够容纳一个或更多个透镜的透镜镜筒。然而,透镜模块100的一个配置不限于透镜镜筒,并且可以使用能够支承一个或更多个透镜的任
何保持器结构。透镜模块100耦接至第一致动器200以移动。作为示例,透镜模块100可以耦接至第一致动器200的内侧。因此,透镜模块100可以响应于第一致动器200的移动使第一致动器200的内侧移动。透镜模块100可以螺纹耦接至第一致动器200。作为示例,透镜模块100可以通过粘合剂(未示出)耦接至第一致动器200。同时,穿过透镜模块100的光可以照射到图像传感器。同时,例如,透镜模块100可以包括五个透镜。透镜模块100可以包括液体透镜和固体透镜。液体透镜包括导电液体和非导电液体,导电液体与非导电液体之间的界面可以通过电力来控制。液体透镜可以是通过调整界面来调整其焦距的透镜。
98.摄像装置可以包括致动器。
99.详细地,摄像装置可以包括用于使透镜模块100移位的第一致动器200。第一致动器200可以是af模块。第一致动器200可以使透镜模块100在竖直方向(显然,光轴方向)上移动。即,第一致动器200可以通过使透镜模块100在光轴方向上移动来执行自动对焦功能。
100.第二致动器600可以驱动图像传感器430。第二致动器600可以使图像传感器430倾斜或旋转。第二致动器600可以移动图像传感器430。第二致动器600可以使图像传感器430在垂直于光轴的第一方向上移动,使图像传感器430在垂直于光轴和第一方向的第二方向上移动,并且使图像传感器430基于光轴旋转。在这种情况下,第一方向可以是x轴方向,第二方向可以是y轴方向,并且光轴可以是z轴方向。
101.同时,第一致动器200和第二致动器600可以包括分别移动透镜模块100和图像传感器430的驱动器。即,第一致动器200可以包括第一驱动器(稍后描述)。另外,第二致动器600可以包括第二驱动器(稍后描述)。第一驱动器和第二驱动器中的每一个可以包括线圈和磁体。另外,线圈和磁体可以在其之间产生电磁力以分别驱动透镜模块100和图像传感器430。
102.摄像装置可以包括壳体。壳体可以包括第一壳体300和第二壳体500。第一壳体300可以是覆盖摄像装置的上部区域的上壳体。在这种情况下,第一壳体300可以是防护罩。
103.第一壳体300可以包括第一开口310和第二开口320。
104.第二开口320可以是向外部暴露第一壳体300中接纳的第一致动器200的配置的一部分的暴露孔。
105.同时,近来,随着摄像技术的发展,图像分辨率增加,从而增加了图像传感器440的尺寸。此时,随着图像传感器440的尺寸增加,透镜模块100和用于使透镜模块100移位的致动器的部件的尺寸也增加。因此,随着用于使透镜模块100移位的其他致动器部件的重量以及透镜模块100的重量增加,使用常规vcm技术难以稳定地移位透镜模块100,并且在可靠性方面会出现很多问题。
106.因此,在本实施方式中,使用实现透镜移位方法的第一致动器200执行af,并且使用实现图像传感器移位方法的第二致动器600执行ois,从而提高摄像装置的可靠性。
107.此外,在摄像装置的摄像抖动中存在5轴摄像抖动。例如,在5轴摄像抖动中,存在以角度抖动的两个摄像抖动、由于移位而抖动的两个摄像抖动、以及由于旋转而抖动的一个摄像抖动。此时,对于透镜移位方法,仅4轴摄像抖动校正是可能的,并且无法校正旋转上抖动的摄像抖动。这是因为由旋转引起的摄像抖动应当通过光学模块的旋转来校正,并且即使透镜模块100旋转,入射光学路径也保持原样,并且因此,对于透镜移位方法,5轴摄像抖动校正是不可行的。因此,在本实施方式中,可以根据如上所述的摄像技术的发展解决透
镜移位方法的可靠性问题,同时应用传感器移位方法以实现5轴摄像抖动校正。
108.在下文中,将更详细地描述根据实施方式的摄像装置的每个配置。实施方式的摄像装置的特征在于第二致动器,并且因此,下面将详细描述第二致动器。
109.《第二致动器》
110.在下文中,将描述第二致动器600。
111.第二致动器600可以位于第一致动器200下方并且可以独立于第一致动器200进行操作以使图像传感器模块400移位。
112.为此,第二致动器600可以包括具有固定位置的固定部和移动部,该移动部的位置在耦接至固定位置的状态下通过第二驱动部的电磁力而移动。固定部是指当第二致动器600被驱动时构成第二致动器600的部件中其位置不改变并且固定的部件,并且移动部是指当第二致动器600被驱动时其位置改变的部件。
113.图5是根据实施方式的第二致动器的分解透视图,图6是图5中示出的保持器的分解透视图,图7是示出图6中示出的阻尼板的视图,图8是图5中示出的第一基板的透视图,图9是图5中示出的线圈移动基板部的分解透视图,图10是图9中示出的线圈移动基板部的第二基板的底视图,图11的(a)是图9中示出的线圈移动基板部的第三基板的平面图,图11的(b)是图9中示出的线圈移动基板部的第三基板的底视图,图12是根据实施方式的第二基板和第三基板的耦接图,图13是图5中示出的第四基板的分解透视图,图14a是图5中示出的第四基板的平面图,图14b是图5中示出的第四基板的底视图,以及图14c是第四基板的部分区域的放大图。
114.参照图5至图14c,第二致动器600包括固定部和移动部。在这种情况下,第二致动器600的固定部可以包括壳体610、保持器部620和基板部630、640和650的一部分。另外,第二致动器600的移动部可以包括基板部630、640和650的剩余部分。基板部630、640和650包括线圈移动基板部640和第四基板650,该线圈移动基板部640包括第一基板630、第二基板641和第三基板642。
115.另外,基板部630、640和650的第一基板630可以是第二致动器600的固定部。另外,包括基板部630、640和650的第二基板641和第三基板642的线圈移动基板部640可以是第二致动器600的移动部。另外,第四基板650可以是固定部,或者替选地,可以是移动部。即,第四基板650的一部分可以是固定部,并且第四基板650的剩余部分可以是移动部。优选地,第四基板650的外框架(稍后描述)可以连接至第一基板630以用作固定部,并且第四基板650的内框架可以连接至包括第二基板641和第三基板642的线圈移动基板部640以用作移动部。这将在下面更详细地进行描述。
116.此外,第二致动器600可以包括壳体610。壳体610可以具有用于在其中容纳构成第二致动器600的部件的容纳空间。优选地,壳体610可以容纳第一基板630、第二基板641、保持器部620、第三基板642和第四基板650的一部分。
117.下面将详细描述如上所述的第二致动器600。
[0118]-壳体-[0119]
壳体610可以包括底部611和侧壁部613,在底部611的中心形成有第一开口612,侧壁部613从底部611的边缘区域向上突出。壳体610的侧壁部613的至少一部分可以包括暴露部616。另外,暴露部616使得壳体610中容纳的第一基板630的一部分能够暴露于壳体610的
外部。壳体610可以包括形成在与底部611的内侧相邻的区域中的多个第一引导突出部614。壳体610可以包括在侧壁部613的上表面上在向下方向上凹陷的耦接凹槽615。
[0120]-保持器部-[0121]
保持器部620被设置在壳体610上。
[0122]
保持器部620可以包括保持器621、阻尼板622和磁体部623。
[0123]
保持器621可以是其中设置有磁体部623的磁体保持器。
[0124]
此外,保持器621可以是其上设置有阻尼板622的阻尼板保持器。
[0125]
保持器621可以包括第一框架621a和第二框架621b,第一框架621a具有形成在中心并设置在壳体610上的第二开口621-1,第二框架621b从第一框架621a的下端向下延伸。
[0126]
保持器621的第一框架621a可以被设置成部分地覆盖壳体610的开口上部区域。第一框架621a可以具有其中第二开口621-1形成在中心的板状形状。第二开口621-1可以在光轴上与第一开口612对准。
[0127]
第二框架621b可以被设置在第一框架621a的下表面上对应于壳体610的暴露部616的区域中。第二框架621b可以从第一框架621a向下延伸并且可以被设置在壳体610的暴露部616中。优选地,第二框架621b可以覆盖壳体610的暴露部616的开口的一部分。即,与第二框架621b中的暴露部616的第二部分对应的区域621-5可以是开口的。
[0128]
即,第二框架621b的面积可以小于暴露部616的面积。因此,第二框架621b可以被设置成仅覆盖暴露部616的第一部分。另外,暴露部616的除第一部分以外的第二部分可以在保持器621被设置在壳体610上的状态下保持开口状态。第二框架621b的区域621-5和暴露部616的第二部分可以在垂直于光轴的方向上与第一壳体300的第二开口区域320对准。因此,暴露部616的第二部分可以使第一致动器200的柔性电路板260的端子262同第一壳体300的第二开口区域320一起暴露。
[0129]
第一安置部621-2可以被设置在保持器621的第一框架621a上。第一安置部621-2可以是被设置在第一框架621a的内上表面上的台阶。
[0130]
其中设置有阻尼板622的弹性部622-2和622-3的第一凹部621-3形成在保持器621的第一安置部621-2中。多个第一凹槽621-3可以形成为在第一安置部621-2上彼此间隔预定间隔。
[0131]
此外,其中插入有连接线624的第一通孔621-4可以形成在第一凹部621-3中。
[0132]
阻尼板622可以被设置在保持器621的第一安置部621-2上。阻尼板622包括设置在第一安置部621-2上的板部622-1,以及从板部622-1延伸并设置在第一凹部621-3上的弹性部622-2和622-3。
[0133]
弹性部622-2和622-3可以与板部622-1一体地形成。然而,弹性部622-2和622-3可以从板部622-1延伸并且包括至少弯折一次的弯折区域。
[0134]
优选地,弹性部622-2和622-3从包括至少弯折一次的弯折区域的第一弹性部622-2延伸,并且第二弹性部622-3从第一弹性部622-2延伸并且具有形成在与第一通孔621-4对应的区域中的孔。即,形成在第二弹性部622-3中的孔和保持器621的第一通孔621-4可以是连接线624穿过的孔。
[0135]
另外,连接线624的一端可以通过焊接耦接至阻尼板622的第二弹性部622-3。
[0136]
如上所述,阻尼板622的弹性部622-2和622-3可以包括弯折部,并且可以优选地通
过弯折多个部形成。因此,阻尼板622的弹性部622-2和622-3可以具有弹性。
[0137]
此时,当阻尼板622的弹性部622-2和622-3不包括弯折部时,当图像传感器模块400移动时,连接线624可能一起移动而导致翘曲,并且取决于翘曲的发生程度,可能发生断裂。替选地,实施方式的阻尼板622的弹性部622-2和622-3包括弯折部,从而,弹性部622-2和622-3可以在图像传感器模块400移动时用作悬架,并且因此,可以通过将弹性赋予连接线624来增加连接线624的刚性。
[0138]
如上所述的连接线624的一端耦接至阻尼板622的弹性部622-2和622-3。另外,连接线624可以穿过保持器621的第一通孔621-4以在保持器621的向下方向上延伸,优选地在壳体610的底部611所在的方向上延伸。
[0139]
连接线624可以具有连接至阻尼板622的一端以及连接至线圈移动基板部640的另一端。在这种情况下,阻尼板622是第二致动器600的固定部,并且线圈移动基板部640是第二致动器600的移动部。在这种情况下,当在不存在连接线624的状态下图像传感器模块400根据线圈移动基板部640的移位而移位时,无论移位发生的方向如何,由于线圈移动基板部640或第四基板650的弹性,均可能发生图像传感器模块400的倾斜。
[0140]
因此,连接线624可以连接至阻尼板622,并且另一端可以连接至线圈移动基板部640以支承线圈移动基板部640。优选地,连接线624可以抑制当线圈移动基板部640、进一步的第四基板650、以及进一步的图像传感器模块400移位时发生的倾斜现象。这里,倾斜现象可以包括图像传感器模块400由于第四基板650的弹性而向下下垂的现象。另外,连接线624可以防止线圈移动基板部640在向下方向上下垂。即,线圈移动基板部640可以在通过连接线624从保持器部620悬置的同时移位,从而使倾斜现象最小化。
[0141]
连接线624可以具有弹性。连接线624可以是弹性构件。连接线624可以是线簧。如上所述,在保持器部620和线圈移动基板部640间隔预定距离的状态下,连接线624可以将阻尼板622连接至线圈移动基板部640的第三基板642。连接线624可以由金属形成。连接线624可以弹性地支承线圈移动基板部640的移动。
[0142]
连接线624可以包括多个线。连接线624可以均匀地分布在四个侧表面上。即,连接线624可以形成相互对称的结构,其中,侧边面对四个侧中的每一个。在这种情况下,连接线624应当弹性地支承线圈移动基板部640。这里,当连接线624被设置成具有非对称结构并且线圈移动基板部640移位时,在具有相对大数目的连接线的部分和除此之外的部分中,移动量或倾斜量出现差异,并且因此,可能出现操作可靠性方面的问题。因此,实施方式中的连接线624均匀地设置在每个区域中,以提高图像传感器移位操作的可靠性。另一方面,尽管在图中示出了存在4个连接线624,但是这仅是实施方式,并且具有上述对称结构,并且可以增加至8或12。
[0143]
同时,其中设置有磁体部623的磁体安置部(未示出)可以形成在保持器621的第一框架621a的下表面上。磁体部623可以被设置在保持器621的磁体安置部上。
[0144]
磁体部623可以被设置成面对设置在线圈移动基板部640上的线圈部(稍后描述)。在这种情况下,当向线圈部施加电流时,可以在线圈部周围形成电场。当向线圈部施加电流时,线圈部可以通过线圈部与磁体部623之间的电磁相互作用相对于磁体部623移动。
[0145]
磁体部623可以被设置在保持器621的下表面的角上。即,磁体部623可以被设置在保持器621的下表面的四个角上。另外,磁体部623可以面对线圈移动基板部640的线圈部。
磁体部623可以是具有平板形状的平坦磁体。
[0146]
磁体部623可以包括多个磁体。磁体部623可以包括四个磁体。磁体部623可以包括第一磁体623-1、第二磁体623-2、第三磁体623-3和第四磁体623-4。
[0147]
第一磁体623-1可以面对设置在线圈移动基板部640的第二基板641上的第一线圈641-2a。第一磁体623-1可以被设置在形成在保持器621的左上侧的第一角上。第二磁体623-2可以面对设置在线圈移动基板部640的第二基板641上的第二线圈641-2b。第二磁体623-2可以被设置在形成在保持器621的右侧的第二角上。第三磁体623-3可以面对设置在线圈移动基板部640的第二基板641上的第三线圈641-2c。第三磁体623-3可以被设置在形成在保持器621的右下侧的第三角上。第四磁体623-4可以面对设置在线圈移动基板部640的第二基板641上的第四线圈641-2d。第四磁体623-4可以被设置在形成在保持器621的左下侧的第四角上。构成磁体部623的磁体中的每一个可以垂直于相邻磁体地设置,并且可以平行于在对角线方向上设置的磁体地设置。
[0148]-第一基板-[0149]
第一基板630可以包括具有形成在中心的第三开口631a的第一区域631,以及从第一区域631延伸并且其中设置有连接至外部装置的连接器的第二区域632。
[0150]
第一基板630可以包括设置在第一区域631中的第一端子部635。第一端子部635可以连接至稍后要描述的第四基板650的第二引线图案部652-2。例如,第四基板650的第二引线图案部652-2被设置在第一基板630的第一端子部635上,并且因此,第二引线图案部652-2和第一端子部635可以通过焊接过程彼此电连接。
[0151]
优选地,第一端子部635可以被设置在第一区域631的上表面中的第三开口631a周围。第一端子部635可以被称为电连接至第四基板650的第二引线图案部652-2的焊盘。
[0152]
第一端子部635可以包括多个端子。第一端子部635可以包括多个第一端子。例如,第一端子部635可以包括设置在第一区域631的第三开口631a的一侧上的多个第一-第一端子635-1,以及设置在与第一区域631的第三开口631a的一侧相对的另一侧上的多个第一-第二端子635-2。
[0153]
第一端子部635的端子的数目可以等于或大于第二引线图案部652-2的图案的数目。当构成第一端子部635的第一端子的数目与构成第二引线图案部652-2的第二引线图案的数目相同时,所有第一端子和第二引线图案可以连接。另外,当构成第一端子部635的第一端子的数目大于构成第二引线图案部652-2的第二引线图案的数目时,第一端子中的一些可以连接至第二引线图案。另外,剩余的第一端子中的一些可以用作用于测试连接状态等的测试端子。
[0154]
连接器可以被设置在连接至第一区域631的第二区域632上。连接器可以是用于电连接至外部装置的端口。
[0155]
第一区域631可以被设置在摄像装置的内部,并且第二区域632可以从第一区域631延伸以暴露于摄像装置的外部。
[0156]
例如,第一区域631被设置在壳体610的内部,并且第二区域632可以通过壳体610的暴露部616设置在壳体610的外部,并且连接至外部装置的连接器可以被设置在外部设置区域上。
[0157]
第一基板630可以向第四基板650发送信号或接收从第四基板650发送的信号。第
一基板630电连接至第四基板650的第一图案部652a,并且因此向第四基板650发送电力信号或通信信号,并且可以接收包括通过传感器模块400获得的图像信号的图像信息。
[0158]
例如,图像传感器模块400耦接至线圈移动基板部640的第三基板642。另外,第三基板642耦接至线圈移动基板部640的第二基板641。另外,第四基板650的第一图案部652a耦接至第三基板642。即,第四基板650的第一图案部652a的第一引线图案部652-1耦接至第三基板642。另外,第四基板650的第一图案部652a耦接至第一基板630。即,第四基板650的第二引线图案部652-2和第一图案部652a耦接至第一基板630。
[0159]
同时,通过图像传感器模块400获取的图像信号被发送至第二基板641。此时,图像信号可以被提供给连接至第二基板641的第三基板642,该图像信号可以再被从第三基板642提供给第四基板650,并且可以再被提供给第一基板630。
[0160]
另外,从第一基板630传送至第二基板641的电力信号或通信信号可以通过第四基板650和第三基板642传送至第二基板641。
[0161]
第一基板630可以包括设置在第一区域631的边缘区域上的第二端子部636。第二端子部636可以电连接至包括在第一致动器200中的柔性电路板260。
[0162]
第一基板630可以通过壳体610的第一引导突出部614安置在壳体610上。第一基板630可以以固定状态放置在壳体610上。即,当第二致动器600被驱动时,第一基板630可以保持固定位置而不移动。
[0163]
同时,上面已经描述了第一基板630的第一区域631被设置在壳体610中。然而,第一区域631的一部分可以基本上设置在壳体610中,并且剩余部分可以与第二区域632一起暴露于壳体610的外部。另外,第一区域631的暴露部上可以设置有陀螺仪传感器633。
[0164]
另外,第一区域631的暴露部中可以设置有无源装置634。
[0165]
即,在本示例性实施方式中,在第一基板630上设置有用于实现防抖功能的陀螺仪传感器633。另外,第一基板630可以使用通过陀螺仪传感器633获得的信息将由于手抖动而引起的角速度/线速度检测信息反馈至线圈移动基板部640。
[0166]-线圈移动基板部-[0167]
线圈移动基板部640可以被设置在壳体610中的保持器部620下方。线圈移动基板部640可以在与保持器部620间隔预定间隔的位置处通过连接线624由保持器部620支承。
[0168]
即,连接线624具有耦接至构成保持器部620的阻尼板622的一端,以及耦接至设置在保持器部620下方的线圈移动基板部640的另一端。当第二致动器600被驱动时,连接线624可以防止线圈移动基板部640在除了移动方向之外的方向上倾斜。即,连接线624可以防止线圈移动基板部640在与移位方向无关的光轴方向上倾斜。即,在通过连接线624由保持器部620支承的状态下,线圈移动基板部640可以通过磁体部623与线圈部641-2之间的相互作用相对于保持器部620或透镜部100移动。
[0169]
为此,线圈移动基板部640可以包括第二基板641、第三基板642和基板保持器643。这里,第二基板641和第三基板642可以是构成线圈移动基板部640的基板部,并且此外,其可以是当第二致动器600被驱动时移动的移动部。
[0170]
第二基板641可以是主基板。第二基板641可以是用于驱动第二致动器600的驱动基板。
[0171]
第二基板641可以包括第四开口641a。第四开口641a可以在光轴方向上与形成在
第一基板630中的第三开口631a交叠。
[0172]
第二基板641可以包括设置在其各个角上的线圈部641-2。
[0173]
线圈部641-2可以电连接至第二基板641中包括的电路图案(未示出)。线圈部641-2可以被设置成面对设置在保持器部620上的磁体部623。另外,当向线圈部641-2施加电流时,可以在线圈部641-2周围形成电场。
[0174]
线圈部641-2可以包括四个线圈。在这种情况下,电流可以独立地施加至四个线圈中的至少三个线圈。在第一实施方式中,线圈部641-2可以通过三个通道控制。替选地,在实施方式中,线圈部641-2可以通过四个单独通道控制。构成线圈部641-2的四个线圈可以彼此电隔离。正向电流和反向电流中的任何一个可以选择性地施加至线圈部641-2的四个线圈中的每一个。在本实施方式中,四个线圈中的仅三个可以电隔离并且一个线圈可以电连接至另一线圈。替选地,线圈部641-2的所有四个线圈均可以电隔离。当四个线圈中的仅三个电隔离时,可以从线圈部641-2引出三对总共六根引线,以及当所有四个线圈均电隔离时,可以从线圈部641-2引出四对总共八根引线。
[0175]
当四个线圈如本实施方式的第一实施方式中那样通过三个通道控制时,在以z轴为中心的旋转驱动中,一对线圈部641-2和磁体部623应当、被驱动,但是当四个线圈如实施方式中那样通过四个通道控制时,在z轴为中心的旋转驱动中,线圈部641-2和磁体部623可以成两对地被驱动。
[0176]
线圈部641-2可以包括第一线圈641-2a、第二线圈641-2b、第三线圈641-2c和第四线圈641-2d。另外,第一线圈641-2a、第二线圈641-2b、第三线圈641-2c和第四线圈641-2d中的每一个可以被设置成面对设置在保持器部620上的磁体部623的每个磁体。
[0177]
第一线圈641-2a可以被设置在第二基板641的第一角上。第二线圈641-2b可以被设置在第二基板641的第二角上。第三线圈641-2c可以被设置在第二基板641的第三角上。第四线圈641-2d可以被设置在第二基板641的第四角上。第一线圈641-2a和第三线圈641-2c可以被设置在第二基板641的第一对角线方向上,并且第二线圈641-2b和第四线圈641-2d可以被设置在第二基板641的第二对角线方向上。
[0178]
在本实施方式中,第一线圈641-2a和第三线圈641-2c可以被设置为在第一方向上伸长,并且第二线圈641-2b和第四线圈641-2d可以被设置为在第二方向上伸长。在这种情况下,第一方向和第二方向可以是垂直的。
[0179]
第一线圈641-2a的长边和第三线圈641-2c的长边可以彼此平行地设置。
[0180]
第二线圈641-2b的长边和第四线圈641-2d的长边可以彼此平行地设置。第一线圈641-2a的长边和第二线圈641-2b的长边可以不彼此平行。在这种情况下,第一线圈641-2a的长边和第二线圈641-2b的长边可以被布置成使得其虚拟延长线彼此正交。第一线圈641-2a的设置方向和第二线圈641-2b的设置方向可以彼此正交。
[0181]
在本实施方式中,电流可以独立地施加至第一线圈916-1、第二线圈916-2、第三线圈916-3和第四线圈916-4中的至少三个线圈。第一线圈916-1、第二线圈916-2、第三线圈916-3和第四线圈916-4可以彼此电隔离。
[0182]
同时,霍尔传感器917可以被设置在第一线圈641-2a、第二线圈641-2b、第三线圈641-2c和第四线圈641-2d的内侧。在这种情况下,霍尔传感器641-3可以仅被设置在第一线圈641-2a、第二线圈641-2b、第三线圈641-2c和第四线圈641-2d中的三个线圈的内侧。这是
因为,在第一实施方式中,由于第一线圈641-2a、第二线圈641-2b、第三线圈641-2c和第四线圈641-2d通过三个通道控制,一个线圈不一定具有霍尔传感器。霍尔传感器641-3可以感测磁体部623的磁力。可以经由由霍尔传感器641-3感测的磁体部623的磁力来实时识别图像传感器模块的移动。另外,这可以使得光学图像稳定(ois)能够反馈控制。
[0183]
可以配置多个霍尔传感器641-3。即,如上所述,霍尔传感器641-3可以包括三个传感器。可以通过三个传感器感测图像传感器440在x轴方向上的移动、在y轴方向上的移动和围绕z轴的旋转。霍尔传感器641-3可以包括第一传感器至第三传感器。第一传感器可以面对第一磁体,第二传感器可以面对第二磁体,并且第三传感器可以面对第三磁体。
[0184]
霍尔传感器641-3可以包括用于感测磁体部623的x轴移动量和/或位移的第一霍尔传感器。霍尔传感器641-3可以包括用于感测磁体部623的y轴移动量和/或位移的第二霍尔传感器。霍尔传感器641-3可以包括用于感测磁体部623的x轴移动量和/或位移或者y轴移动量和/或位移的第三霍尔传感器。可以通过第一霍尔传感器、第二霍尔传感器和第三霍尔传感器中的至少两个来感测磁体部623围绕z轴旋转的移动。
[0185]
用于控制第二致动器的操作的驱动器ic 641-4可以被设置在第二基板641上。另外,用于操作第二致动器的各种无源装置641-5可以被设置在第二基板641上。
[0186]
在这种情况下,第二基板641应当将线圈部641-2、驱动器ic 641-4和无源装置641-5彼此连接,并且然后连接至第一基板630。这里,从第二基板641到第一基板630的电连接所需的端子可以是十二个。十二个端子可以是连接至驱动器ic 641-4的端子。在这种情况下,12个端子中的4个可以彼此连接。因此,四个端子可以由一个端子构成。因此,当在第一基板630与第二基板641之间连接时,与驱动器ic 641-4连接需要八个端子。
[0187]
另外,与第二基板641上的图像传感器模块400电连接所需的端子的数目可以是28个。另外,第二基板641必须将通过图像传感器模块400获取的图像信号发送至第一基板630。因此,在第一基板630与第二基板641之间的连接中,图像信号的传输需要28个端子。
[0188]
第三端子部641-8被设置在第二基板641的下表面上,并且连接至驱动器ic 641-4,或者将通过图像传感器模块400获取的图像信号传送至第一基板630。第三端子部641-8可以是用于与第一基板630电连接的焊盘。优选地,第一基板630和第二基板641彼此不直接交换信号,而是通过设置在中间的第三基板642交换信号。因此,第三端子部641-8可以是用于与第三基板642电连接的焊盘。优选地,第三端子部641-8可以连接至第二基板641,以将从第一基板630生成的信号(例如,控制信号)传送至第二基板641,或者将从第二基板641生成的信号(例如,图像信号)传送至第一基板630。
[0189]
同时,第三端子部641-8可以被设置在第二基板641的下表面上的多个区域中。例如,第三端子部641-8可以包括设置在第二基板641的下表面的第四开口641a的第一侧上的第三-第一端子部641-8a,以及设置在面对第一侧的第二侧上的第三-第二端子部641-8b。
[0190]
另外,与图像传感器模块400耦接的第四端子部641-7可以形成在第二基板641的下表面上。第四端子部641-7可以被设置在第二基板641的下表面上的多个区域上。
[0191]
即,第四端子部641-7可以包括第四-第一端子部641-7a和第四-第二端子部641-7b,第四-第一端子部641-7a和第四-第二端子部641-7b被设置在第四开口641a的下表面上的彼此面对的区域中,其中第四开口641a介于其之间。此时,第四端子部641-7可以连接至图像传感器模块400,以接收通过图像传感器模块400发送的图像信号或接收除了图像信号
之外的信号。
[0192]
在这种情况下,当用于接收图像信号的端子和用于接收其他信号的端子被设置在第二基板641的下表面的相同区域上时,图像信号可能包括噪声信号。因此,在连接至图像传感器模块400的第四端子部641-7中,传输图像信号的第四-第一端子部641-7a和传输其他信号的第四-第二端子部641-7b被设置在不同区域中,并且因此,可以提高图像信号的质量。
[0193]
同时,可以在第二基板641中形成第二通孔641-6。在这种情况下,第二通孔641-6可以与形成在保持器621中的第一通孔621-4在光轴方向上对准并在光轴方向上一起布置。第二通孔641-6可以是耦接至阻尼板622的连接线624穿过的线通孔。
[0194]
第三基板642可以被设置在第二基板641下方。第三基板642可以中继第一基板630、第二基板641和第四开口641a之间的电连接。
[0195]
在这种情况下,基板保持器643可以被设置在第二基板641与第三基板642之间。
[0196]
基板保持器643可以被设置在第二基板641与第三基板642之间,以增加第二基板641与第三基板642之间的接合力。
[0197]
可以在基板保持器643的中心形成第五开口643-1。第五开口643-1可以与形成在第二基板641中的第四开口641a在光轴方向上对准。
[0198]
另外,基板保持器643可以包括在边缘区域上向外延伸的突出部643-2。突出部643-2可以形成为从基板保持器643的侧表面向外突出。突出部643-2可以被安置在第二基板641的上表面上,使得突出部643-2的下表面与第二基板641的上表面接触。在这种情况下,可以配置多个突出部643-2,使得基板保持器643可以稳定地安置在第二基板641上。
[0199]
同时,形成在基板保持器643上的突出部643-2可以被设置在与形成在第二基板641中的第二通孔641-6在光轴方向上交叠的区域中。因此,突出部643-2可以包括凹部643-3,该凹部643-3向内凹陷以使第二通孔641-6暴露。
[0200]
另外,第三基板642可以耦接至第二基板641下方的基板保持器643。也可以在第三基板642的中心形成开口,并且开口可以与第二基板641、第三基板642、第一致动器等的开口在光轴方向上对准。
[0201]
如图11的(a)所示,第三基板642可以包括形成在第三基板642的上表面上的第五端子部642-2。
[0202]
第五端子部642-2可以面对形成在第二基板641的下表面上的第三端子部641-8。即,第五端子部642-2可以被布置成在光轴方向上与形成在第二基板641上的第三端子部641-8对准。另外,第五端子部642-2可以包括与第三端子部641-8的端子的数目对应的端子。第五端子部642-2和第三端子部641-8可以通过焊接彼此电连接。
[0203]
在这种情况下,第五端子部642-2可以包括连接至第三端子部641-8的第三-第一端子部641-8a的第五-第一端子部642-2a,以及连接至第三-第二端子部641-8a的第五-第二端子部642-2b。
[0204]
此外,如图11的(b)所示,第三基板642可以包括形成在其下表面上的第六端子部642-3。第六端子部642-3可以电连接至稍后将描述的第四基板650的第一图案部652a。更优选地,第六端子部642-3可以耦接至第四基板650的第一图案部652a的第一引线图案部652-1。即,第四基板650被设置在第六端子部642-3下方,并且进一步地被放置在第四基板650的
第一图案部652a中的第一引线图案部652下方。另外,第六端子部642-3可以通过焊接耦接和电连接至第一引线图案部652-1。
[0205]
在这种情况下,第五端子部642-2和第六端子部642-3可以在光轴方向上彼此对准。即,第五端子部642-2和第六端子部642-3中的一些接收从第二基板641发送的图像信号,并且将接收的图像信号通过第四基板650传送至第一基板630。在这种情况下,发送图像信号的信号线的长度越长,其可能影响图像信号的质量的程度越大,并且因此,第五端子部642-2和第六端子部642-3可以在光轴方向上彼此对准,以使信号线的长度最小化。并且,第五端子部642-2和第六端子部642-3中的一个是用于发送图像信号的端子,另一个是用于发送除了图像信号之外的信号的端子。因此,实施方式中的第五端子部642-2和第六端子部642-3利用其之间的开口彼此分开,并且从而使在发送图像信号的过程中产生的噪声的影响最小化。
[0206]
同时,第三基板642可以包括从外表面向外突出的多个耦接突出部642-1。另外,耦接突出部642-1可以包括在光轴方向上穿透的第三通孔642-4。
[0207]
第三通孔642-4可以在光轴方向上与形成在保持器621中的第一通孔621-4和形成在第二基板641中的第二通孔641-6对准。另外,穿过第一通孔621-4和第二通孔641-6的连接线624的一部分可以被设置在第三通孔642-4中。
[0208]
在这种情况下,可以在耦接突出部642-1的下表面上的第三通孔642-4周围设置耦接焊盘(未示出)。耦接焊盘(未示出)可以被设置在第三通孔642-4周围以用于焊接连接线624。另外,连接线624的另一端可以在穿过第三通孔642-4之后焊接至耦接焊盘。
[0209]
因此,连接线624的一端连接至阻尼板622,并且连接线624的另一端连接至第三基板642。另外,连接线624的一端与另一端之间的部分可以位于第一通孔621-4、第二通孔641-6和第三通孔642-4中。在这种情况下,连接线624的长度可以大于阻尼板622的厚度、保持器621的厚度、第二基板641的厚度和第三基板642的厚度之和。因此,线圈移动基板部640可以被设置为在与保持器部620间隔预定距离的位置处通过连接线624从保持器部620悬置的状态。
[0210]-第四基板-[0211]
第四基板650可以被设置在第一基板630与第三基板642之间。第四基板650的至少一部分可以具有弹性。另外,设置在第四基板650上的线圈移动基板部640可以通过第四基板650的弹力以及磁体部623与线圈部641-2之间的相互作用而相对于透镜部移动。第四基板650也可以被表达为其上设置有图像传感器的图像传感器基板。
[0212]
第四基板650使得能够进行图像传感器模块400的移位并且还使得能够进行信号传输。
[0213]
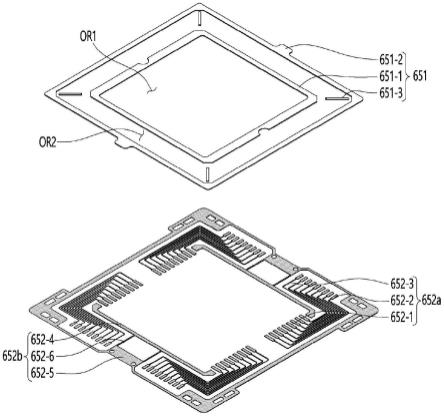
第四基板650包括绝缘层651和设置在绝缘层651的一个表面上的图案部652。此时,尽管附图示出图案部652被设置在绝缘层651的下表面上,但实施方式不限于此,并且图案部652可以被设置在绝缘层651的上表面上。
[0214]
绝缘层651可以被划分成彼此分开的多个区域。
[0215]
例如,绝缘层651可以包括其中在中心形成第一开口区域or1的第一绝缘部651-1,以及设置在第一绝缘部651-1的外部并与第一绝缘部651-1间隔开的第二绝缘部651-2。在这种情况下,尽管在附图中示出第一绝缘部651-1和第二绝缘部651-2彼此分开,但实施方
式不限于此。还可以在第一绝缘部651-1与第二绝缘部651-2之间设置连接第一绝缘部651-1的外侧与第二绝缘部651-2的内侧的连接绝缘部(未示出)。换言之,绝缘层651可以具有第一绝缘部651-1和第二绝缘部651-2以介于其之间的开口区域完全物理地完全分开的结构,替选地可以在一些区域中通过另外地设置在开口区域中的连接绝缘部彼此连接。这使得能够保留绝缘部的一部分而不完全去除第一绝缘部651-1与第二绝缘部651-2之间的区域,并且剩余绝缘部可以用作连接在第一绝缘部651-1与第二绝缘部651-2之间的连接绝缘部。连接绝缘部可以在图像传感器模块400的移位操作中提供弹力,并且此外,可以防止在移位操作期间第一绝缘部651-1与第二绝缘部651-2之间的分离。绝缘层651可以通过蚀刻或物理冲压去除一个绝缘构件上的与开口区域对应的区域来形成。
[0216]
然而,这里重要的是,在实施方式的绝缘层651中,在第一绝缘部651-1与第二绝缘部651-2之间形成第二开口区域or2,并且第一绝缘部651-1和第二绝缘部651-2可以在第二开口区域or2中彼此分开而不彼此连接。
[0217]
第二绝缘部651-2可以被设置成在通过第二开口区域or2与第一绝缘部651-1间隔预定距离的位置处围绕第一绝缘部651-1的外围。在这种情况下,第一绝缘部651-1和第二绝缘部651-2可以形成设置在同一平面上的单层结构。
[0218]
绝缘层651可以具有20μm至100μm的厚度。例如,绝缘层651可以具有25μm至50μm的厚度。例如,绝缘层651可以具有30μm至40μm的厚度。当绝缘层651的厚度大于100μm时,第四基板650的整体厚度可能增加。当绝缘层651的厚度小于20μm时,可能无法稳定地支承图案部652。例如,当绝缘层651的厚度小于20μm时,其在用于与第一基板630或第三基板642接合的焊接过程中可能易受热量/压力等的影响,并且因此,可能使与第一基板630或第三基板642的接合力减小。
[0219]
同时,尽管图中未示出,但可以在第一绝缘部651-1上形成至少一个狭缝(未示出)。可以形成狭缝以保持第一绝缘部651-1的平坦度。狭缝使绝缘层651的重量减少,并且还使第四基板650的重量减少,同时保持了平坦度,从而提高了摄像模块的整体可靠性。
[0220]
图案部652被设置在绝缘层651的一个表面上。
[0221]
图案部652包括具有信号传输功能的第一图案部652a,以及与第一图案部652a分开并用于确保刚性的第二图案部652b。第二图案部652b可以被称为用于确保第四基板650的刚性的加强图案。同时,尽管图中未示出,但是可以在绝缘层651与图案部652之间设置粘合片(未示出),并且因此,可以提高绝缘层651与图案部652之间的粘合力。
[0222]
第一图案部652a包括设置在绝缘层651的第一绝缘部651-1上的第一引线图案部652-1、设置在绝缘层651的第二绝缘部651-2上的第二引线图案部652-2、以及连接图案部652-3,该连接图案部652-3被设置在第一绝缘部651-1与第二绝缘部651-2之间的第二开口区域or2上并且电连接于第一引线图案部652-1与第二引线图案部652-2之间。在这种情况下,连接图案部652-3被设置在第一绝缘部651-1与第二绝缘部651-2之间的第二开口区域or2上。
[0223]
第一引线图案部652-1可以分别设置在第一绝缘部651-1的四个侧区域中的彼此面对的两个侧区域上。即,第一绝缘部651-1可以包括左侧区域、右侧区域、上侧区域和下侧区域。另外,第一引线图案部652-1可以分别设置在第一绝缘部651-1的四个侧区域中的彼此面对的上侧区域和下侧区域中。另外,第一引线图案部652-1可以不设置在第一绝缘部
2之间的第二开口区域or2的宽度。
[0235]
连接图案部652-3可以通过增材过程、减材过程、改良的半增材过程(msap)和半增材过程方法(sap)的方法蚀刻形成,以具有如上所述的形状。优选地,第一引线图案部652-1、第二引线图案部652-2和连接图案部652-3彼此一体地形成,并且因此,可以通过蚀刻一个金属层同时形成。
[0236]
同时,包括第一引线图案部652-1、第二引线图案部652-2和连接图案部652-3的第一图案部652的厚度可以为10μm至50μm。例如,第一图案部652的厚度可以为30μm至40μm。在这种情况下,当第一图案部652的厚度小于10μm时,第一图案部652可能在图像传感器模块400的移位期间损坏。另外,当第一图案部652的厚度大于50μm时,连接图案部652-3的弹力可能降低,并且因此可能阻碍图像传感器模块400的移动性。因此,第一图案部652的厚度为35μm
±
5μm,使得在实施方式中图像传感器模块400可稳定地移位。
[0237]
另外,连接图案部652-3的长度大于第一绝缘部651-1与第二绝缘部651-2之间的第二开口区域or2的宽度。这里,第二开口区域or2的宽度可以是以直线连接第一绝缘部651-1和第二绝缘部651-2的直线距离。
[0238]
另外,连接图案部652-3的长度是直线距离的至少1.5倍。另外,将连接图案部652-3的长度设定为直线距离的20倍或以下。
[0239]
此时,当连接图案部652-3的长度小于直线距离的1.5倍时,图像传感器模块400的移位操作可能由于连接图案部652-3的弹力的减小而受到影响。另外,当连接图案部652-3的长度大于线性距离的20倍时,电阻随着与连接图案部652-3的长度对应的信号传输距离的增加而增加,并且因此,噪声可能被包括在通过连接图案部652-3发送的信号中。
[0240]
另一方面,如上所述的第一图案部652是发送电信号的布线,并且可以由具有高导电性的金属材料形成。为此,第一图案部652可以由选自金(au)、银(ag)、铂(pt)、钛(ti)、锡(sn)、铜(cu)和锌(zn)中的至少金属材料形成。另外,第一图案部652可以由包括选自具有优异的接合强度的金(au)、银(ag)、铂(pt)、钛(ti)、锡(sn)、铜(cu)和锌(zn)中的至少一种金属材料的膏或焊膏形成。
[0241]
优选地,第一图案部652可以由具有弹力的金属材料形成,同时用作用于发送电信号的布线,该弹力使得设置在第四基板650上的线圈移动基板部640上的图像传感器模块400的x轴、y轴和z轴方向上的移位能够进行。为此,第一图案部652可以由拉伸强度为1000mpa或以上的金属材料形成。例如,第一图案部652可以是包括铜的二元合金或三元合金。例如,第一图案部652可以是包括选自镍(ni)、锡(sn)、铍(be)、钴(co)和铜(cu)中的至少一种的二元合金或三元合金。第一图案部652可以由诸如铁(fe)、镍(ni)、锌等的合金形成,该合金具有良好的电特性,同时具有能够用作弹簧的弹力。此外,可以用包括诸如金(au)、银(ag)、钯(pd)等的金属材料的镀层对第一图案部652进行表面处理,从而提高导电性。
[0242]
第二图案部652b可以选择性地设置在绝缘层651的一个表面上的未设置第一图案部652的区域中。
[0243]
第二图案部652b可以包括设置在第一绝缘部651-1上的第一加强图案652-4、设置在第二绝缘部651-2上的第二加强图案652-5、以及第三加强图案652-6,该第三加强图案652-6被设置在第二开口区域or2上并且连接第一加强图案652-4和第二加强图案652-5。
[0244]
第一加强图案652-4可以被设置在第一绝缘部651-1的左侧区域和右侧区域上。
[0245]
另外,第二加强图案652-5可以被设置在第二绝缘部651-2的一个表面上的未设置第二引线图案部652-2的区域中。
[0246]
另外,第二加强图案652-5包括设置在第二绝缘部651-2的上表面上的第一部分,以及从第一部分延伸并设置在第二绝缘部的外部的第二部分。第二加强图案部652b的第二部分可以被设置成延伸到第二绝缘部651-2的外部,以在确保第二基板641的刚性的同时保持第二基板641的平坦度。另外,可以在第二加强图案652-5的第二部分中形成至少一个耦接孔652-7。因此,尽管图中未示出,但可以在第一基板630上设置与耦接孔652-7对应的耦接突出部(未示出),并且因此,可以增加第四基板650与第一基板630之间的接合力。
[0247]
同时,第二图案部652b可以由与第一图案部652的金属材料相同的金属材料形成。优选地,第二图案部652b可以与第一图案部652一起在同一过程中形成。
[0248]
同时,第四基板650的第一绝缘部651-1、第一引线图案部652-1和第一加强图案652-4可以是与线圈移动基板部640一起移动的移动部。
[0249]
另外,第四基板650的第二绝缘部651-2、第二引线图案部652-2和第二加强图案652-5可以是固定在第一基板630上的固定部。
[0250]
另外,第四基板650的连接图案部652-3可以是具有弹力的金属图案,该弹力使得发送信号的同时,图像传感器模块400的移位能够进行。
[0251]
另外,第四基板650的第三加强图案652-6可以具有使得图像传感器模块400能够与连接图案部652-3一起移位的弹力。
[0252]
同时,第一引线图案部652-1的线宽可以与第二引线图案部652-2的线宽相同。
[0253]
另外,连接图案部652-3的线宽可以小于第一引线图案部652-1和第二引线图案部652-2的线宽。
[0254]
此时,缓冲部在宽度上逐渐减小,具有圆的侧表面而不是直线,并且可以形成在第一引线图案部652-1与连接图案部652-3之间以及第二引线图案部652-2与连接图案部652-3之间。
[0255]
即,连接图案部652-3的两端的侧表面可以具有曲率。此时,当连接图案部652-3的两端的侧表面具有直线形状时,应力可能集中在连接图案部的侧表面中,并且因此,可能发生连接图案部652-3与第一引线图案部652-1或第二引线图案部652-2分开的断开现象。
[0256]
因此,连接图案部652-3的端部具有圆的侧表面以防止应力集中在端部处。
[0257]
此时,将连接图案部652-3的端部的侧表面的曲率r的值设定为30与100之间的值。当侧表面的曲率(r)的值小于30时,防止应力集中效果不足,而当其大于100时,连接图案部652-3的弹力可能减小。
[0258]
这里,连接图案部652-3的线宽可以是20μm至1000μm的线宽。当连接图案部652-3的线宽小于20μm时,连接图案部652-3的整体刚性可能降低,从而降低可靠性。另外,当连接图案部652-3的线宽大于1000μm时,连接图案部652-3的弹力减小,并且因此在图像传感器模块400的移位方面可能出现问题。
[0259]
同时,第一引线图案部652-1可以包括设置在绝缘层651的第一绝缘部651-1上的第一-第一引线图案部652-1a,以及从第一-第一引线图案部652-1a延伸并向第一绝缘部651-1的内部突出的第一-第二引线图案部652-1b。第一-第二引线图案部652-1b被设置成
从第一绝缘部651-1突出,并且因此,可以为用于与第三基板642的第六端子部642-3耦接而执行的焊接过程提供便利性。
[0260]
第二引线图案部652-2可以包括设置在绝缘层651的第二绝缘部651-2上的第二-第一引线图案部652-2a,以及从第二-第一引线图案部652-2a延伸并向第一绝缘部651-2的外部突出的第二-第二引线图案部652-2b。第二-第二引线图案部652-2b被设置成从第二绝缘部651-2向外突出,并且因此,可以为用于与第一基板630的第一端子部635耦接而执行的焊接过程提供便利性。
[0261]
同时,绝缘层651可以包括设置在第一绝缘部651-1与第二绝缘部651-2之间的第二开口区域or2上的第三绝缘部651-3。
[0262]
第三绝缘部651-3可以被设置在连接图案部652-3上。第三绝缘部651-3可以用于增加连接图案部652-3的刚性。
[0263]
另外,在图像传感器模块400的操作期间,连接图案部652-3的形状改变,并且因此,不同的连接图案部可以彼此接触。因此,第三绝缘部651-3可以被设置在连接图案部652-3上,以保持连接图案部652-3之间的间隙。即,第三绝缘部651-3可以形成为解决在图像传感器模块400的移位操作期间多个连接图案部652-3彼此接触时可能发生的短路问题。
[0264]
为此,第三绝缘部651-3可以共同设置在多个不同的连接图案部652-3上。优选地,第三绝缘部651-3可以被设置在多个不同的连接图案部652-3的弯折部上。即,连接图案部652-3的弯折部可以具有较低的刚性,并且因此,第三绝缘部651-3可以在解决短路问题的同时增加弯折部的刚性。
[0265]
《图像传感器模块》
[0266]
图15是根据实施方式的图像传感器模块400的分解透视图。
[0267]
参照图15,图像传感器模块400可以包括滤光器440、粘合构件440、传感器基座410、图像传感器430和图像传感器基板420。
[0268]
图像传感器模块400包括传感器基座410。
[0269]
传感器基座410可以包括开口411,并且可以设置台阶状突出部以使得滤光器440能够相邻于开口411地安置。另外,粘合构件可以被设置在台阶状突出部上,并且滤光器440可以固定地设置在粘合构件上。这样的滤光器440可以用于阻挡穿过透镜模块100的具有特定光频带的光入射在图像传感器430上。滤光器440可以平行于x-y平面地设置。滤光器440可以被设置在透镜模块100与图像传感器430之间。滤光器440可以包括红外滤光器。红外滤光器可以吸收或反射入射在红外滤光器上的红外光。
[0270]
图像传感器基板420可以是封装基板。即,图像传感器430可以以封装形式安装在图像传感器基板420上。图像传感器基板420可以包括印刷电路板(pcb)。图像传感器基板420可以包括电路基板。图像传感器430可以被设置在图像传感器基板420上。图像传感器基板420可以耦接至第二基板641。为此,可以在图像传感器基板420的下表面上设置电连接至第二基板641的第四端子部641-7的第七端子部421。在这种情况下,如上所述,第七端子部421也被布置在图像传感器基板420的下表面上彼此相对的边缘区域处,并且因此,发送图像信号的焊盘的位置可以与其他焊盘分开。同时,图像传感器基板420可以位于第二基板641的开口内,并且第七端子部421可以在与第二基板641的第四端子部641-7的水平方向上布置在第二基板641的开口中。另外,第四端子部641-7和第七端子部421可以通过焊接等彼
此耦接。此时,在附图中省略了通过焊接的粘合构件,第七端子部421和第四端子部641-7可以在焊接过程之前间隔开,并且第七端子部421和第四端子部641-7可以通过焊接过程彼此电连接。
[0271]
图像传感器430可以具有穿过透镜模块100和滤光器440的光入射以形成图像的配置。图像传感器430可以安装在图像传感器基板420上。图像传感器430可以电连接至图像传感器基板420。作为示例,图像传感器430可以通过表面安装技术(smt)耦接至图像传感器基板420。作为另一示例,图像传感器430可以通过倒装芯片技术耦接至图像传感器基板420。图像传感器430可以被设置成在光轴上与透镜模块100重合。即,图像传感器430的光轴和透镜模块100的光轴可以对准。图像传感器430可以将照射到图像传感器430的有效图像区域的光转换成电信号。另外,转换后的电信号可以是图像信号。图像传感器430可以是电荷耦接器件(ccd)、金属氧化物半导体(mos)、cpd和cid中的任何一种。
[0272]
《图像传感器模块移位驱动操作》
[0273]
在下文中,将描述图像传感器模块400的移位操作。
[0274]
图16a是用于通过根据本实施方式的摄像装置的一些配置来说明x轴方向移位驱动的视图,图16b是用于通过根据本实施方式的摄像装置的一些配置来说明y轴方向移位驱动的视图,图16c是用于通过根据本实施方式的摄像装置的一些配置来说明z轴旋转驱动的视图,以及图17是示出根据本实施方式的摄像装置的磁体与线圈之间的磁流和洛伦兹力的视图。
[0275]
如图16a所示,在本实施方式中,当相同方向的电流施加至第二线圈641-2b和第四线圈623-2d时,耦接至图像传感器模块400的图像传感器430可以通过分别在第二磁体623-2与第四磁体623-4之间的电磁相互作用在x轴方向上移动(移位)。即,第二线圈641-2b、第二磁体623-2以及第四线圈623-2d和第四磁体623-4可以用于图像传感器430的x轴方向移位驱动。在这种情况下,第二线圈641-2b和第二磁体623-2可以是第一x轴移位驱动器x1,并且第四线圈623-2d和第四磁体623-4可以是第二x轴移位驱动器x2。
[0276]
如图16b所示,在本实施方式中,当相同方向的电流施加至第一线圈641-2a和第三线圈641-2c时,耦接至图像传感器模块400的图像传感器430可以通过分别在第一磁体623-1与第三磁体623-3之间的电磁相互作用在y轴方向上移动(移位)。即,第一线圈641-2a、第一磁体623-1、第三线圈641-2c和第三磁体623-3可以用于图像传感器430的y轴方向移位驱动。在这种情况下,第一线圈641-2a和第一磁体623-1可以是第一y轴移位驱动器y1,并且第三线圈641-2c和第三磁体623-3可以是第二y轴移位驱动器y2。
[0277]
如图16c所示,在本实施方式中,相反方向的电流施加至第一线圈641-2a和第三线圈623-2c,并且相反方向的电流施加至第二线圈641-2b和第四线圈641-2d,并且此时,当线圈部641-2通过施加至第二线圈641-2b的电流和施加至第一线圈641-2a的电流而旋转的方向相同时,耦接至图像传感器模块400的图像传感器430可以绕z轴旋转(滚转)。图16c中示出的实施方式示出了线圈部641-2通过四个通道控制的情况,并且当线圈部641-2由三个通道控制时,图像传感器430可以通过第一线圈641-2a和第三线圈623-2c或第二线圈641-2b和第四线圈641-2d的作用而滚转。这是因为当在第一线圈641-2a和第三线圈623-2c以及第二线圈641-2b和第四线圈641-2d中存在被组合成一个通道的线圈时,不在相反方向上施加电流。
[0278]
在本实施方式中,磁体部623的磁流在图17中示出。参照图17,可以确认存在垂直于线圈部641-2地通过的磁力线,并且当在这种状态下向线圈部641-2施加电流时,线圈部641-2可以通过洛伦兹力相对于磁体部623移动。
[0279]
《移位可靠性评估》
[0280]
图18的(a)是示出根据比较示例的摄像模块的可靠性评估结果的视图,以及图18的(b)是示出根据实施方式的摄像模块的可靠性评估结果的视图。
[0281]
在实施方式中,线圈移动基板部640连接至设置在第四基板650的第一绝缘部651-1上的第一引线图案部652-1,图像传感器模块400连接至线圈移动基板部640,并且由通过第四基板650的连接图案部652-3提供的弹力进行移位。
[0282]
在这种情况下,连接图案部652-3被布置在与光轴方向水平的方向上,以使得图像传感器模块400能够移位。
[0283]
这里,当仅利用连接图案部652-3执行图像传感器模块400的移位操作时,当图像传感器模块400移位时,连接图案部652-3可以在光轴方向上倾斜。
[0284]
即,确认了在如图18的(a)所示的使图像传感器模块400在x轴方向上移位的操作期间图像传感器模块400在光轴方向上倾斜。即,确认了线圈移动基板部640的设置有图像传感器模块400的一侧在发生第一倾斜(倾斜1)的向上方向上移动,而线圈移动基板部640的另一侧在发生第二倾斜(倾斜2)的向下方向上移动。另外,如上所述的第一倾斜倾斜1和第二倾斜倾斜2可以影响图像传感器模块400的移位操作的可靠性。
[0285]
另一方面,如图18的(b)所示,实施方式包括连接线,该连接线的一端连接至包括在保持器部中的阻尼板,以及另一端连接至线圈移动基板部640。另外,连接线在摄像装置中沿光轴方向布置。因此,防止了连接线在线圈移动基板部640的移位操作期间向上或向下倾斜。即,连接线支承线圈移动基板部640,并且因此,防止了在移位操作期间发生的线圈移动基板部640的下垂现象。
[0286]
同时,根据以上实施方式的摄像装置可以被设置在光学装置中。这里,光学装置可以是移动电话和便携式电话、智能电话、便携式智能装置、数字摄像、膝上型计算机、数字广播终端、个人数字助理(pda)、便携式多媒体播放器(pmp)和导航中的任一者。然而,光学装置的类型不限于此,并且用于拍摄图像或照片的任何装置可以被包括在光学装置中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。