1.本发明涉及一种引导搬运物的移动方向的技术。
背景技术:
2.一直以来,在设置u形沟或侧沟等道路附带连续构造物时,首先,设置作为设置场所的大致参照的桩(stake),以桩为目标设置道路附带的连续构造物。然而,在设置构造物时,正在推进高精度化以及节省人力化,希望即使不使用桩也能高精度地设置构造物。
3.例如,专利文献1公开了一种技术,不需使用桩也可以安装道路附带的连续构造物。专利文献1所示的构造物误差计算工序,用使移动站载置在u型槽上的全站仪对u型槽的表面位置数据进行实际测量,通过在处理装置对构造物表面位置数据和设计数据进行比较来计算构造物施工误差。构造物施工误差是指从标准位置起的偏离方向以及偏离距离。显示装置显示应校正的移动方向和移动距离。
4.上述的现有技术,将来自全站仪的位置数据(u型槽的施工位置)与设计图的三维坐标数据(设计数据)进行比较,计算出u型槽施工误差(水平位置以及高度位置的误差),根据该误差推导出应校正的移动方向以及移动距离,并在显示装置上进行显示。然而,有时需要沿着诸如曲线或直线之类的目标线设置构造物。上述的现有技术并没有公开如何引导构造物的移动方向以便可以接近目标线。为此,期望能沿着目标线高精度地引导搬运物的移动方向。
5.现有技术文献专利文献专利文献1:日本专利公开公报特开2017-25633号。
技术实现要素:
6.本发明的目的在于提供一种可以沿着目标线高精度地引导搬运物的移动方向的技术。
7.本发明的一方面涉及的引导系统,包括:检测部,用于检测搬运物的坐标以及所述搬运物的方向的至少其中之一;控制器,获取通过所述检测部检测到的所述搬运物的坐标以及所述搬运物的方向的至少其中之一;显示部;以及,存储器,其中,所述存储器预先存储目标线信息,所述目标线信息表示所述搬运物的设置目标并且与用曲线以及折线的至少其中之一表示的目标线相关,所述控制器:基于所述目标线信息,计算作为与所述搬运物的目标坐标相关的信息以及与所述搬运物的目标方向相关的信息的至少其中之一的目标信息;基于通过所述检测部检测到的所述搬运物的坐标以及所述搬运物的方向的至少其中之一,计算作为可以与所述目标信息进行对比的信息的检测信息;计算所述检测信息相对于所述目标信息的偏差;使所述显示部显示让所述偏差变小的所述搬运物的移动方向。
8.根据本发明,可以沿着目标线高精度地引导搬运物的移动方向。
附图说明
9.图1是俯视本实施方式的作业设备、搬运物以及引导系统时的示意图。
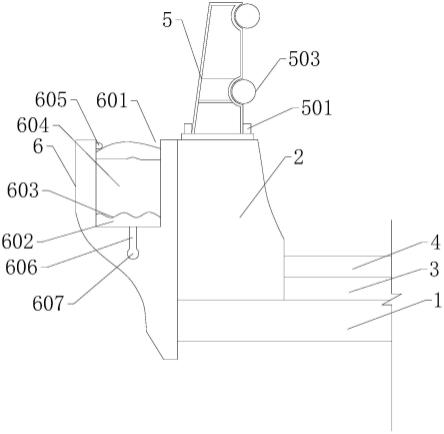
10.图2是表示本实施方式的搬运物以及框架部的外观的立体图。
11.图3是表示本实施方式的引导系统的构成的方框图。
12.图4是在本实施方式的第一实施例、俯视将搬运物设置在目标线的外侧之前的作业现场时的示意图。
13.图5是俯视将接近图4所示的搬运物的基准构造物的端且接近目标线的点与设置了基准构造物的搬运物的端且接近目标线的点相互对齐的状态下的作业现场时的示意图。
14.图6是俯视图5所示的搬运物被沿着目标线而设置的状态下的作业现场时的示意图。
15.图7是在本实施方式的第二实施例、俯视将搬运物设置在目标线的内侧之前的作业现场时的示意图。
16.图8是俯视将接近图7所示的搬运物的基准构造物的端且远离目标线的点与设置了基准构造物的搬运物的端且远离目标线的点相互对齐的状态下的作业现场时的示意图。
17.图9是俯视图8所示的搬运物被沿着目标线而设置的状态下的作业现场时的示意图。
18.图10是在本实施方式的第三实施例、俯视将搬运物设置在折线状的目标线的内侧之前的作业现场时的示意图。
19.图11是用于说明将传感器坐标系与现场坐标系相互关联的校准处理(calibration process)的示意图。
具体实施方式
20.参照图1至图11对图1所示的作业设备1搬运搬运物20时所利用的引导系统30进行说明。另外,以下的实施方式是具体化本发明的一个例子而已,并不用于限定本发明的技术保护范围。
21.图1是俯视本实施方式的作业设备1、搬运物20以及引导系统30时的示意图。
22.作业设备1是进行使搬运物20移动的作业的设备。作业设备1例如是进行建筑作业的工程机械,例如,既可以是挖掘机也可以是起重机。以下,对作业设备1为挖掘机的情况进行说明。作业设备1具备下部行走体11、上部回转体13、附属装置15。
23.下部行走体11使作业设备1行走。下部行走体11例如具备履带。上部回转体13可回转地搭载在下部行走体11上。上部回转体13具备驾驶室13a。在驾驶室13a,作业设备1的操作人员(设备操作人员)操作作业设备1。
24.附属装置15被在上下方向可转动地安装于上部回转体13,进行使搬运物20移动的作业。附属装置15例如具备动壁15a、斗杆15b、夹持装置15c。动壁15a可起伏地安装于上部回转体13。斗杆15b可旋转地安装于动壁15a。夹持装置15c是夹持(换句话说,以夹住的方式把持)搬运物20的装置。夹持装置15c以可向任意的方向(换句话说,绕彼此正交的三个轴)旋转的方式安装于斗杆15b。另外,作业设备1也可以不用夹持装置15c夹持搬运物20,例如,也可以通过绳索等吊搬运物20。在作业设备1吊搬运物20的情况下,例如,通过设置在斗杆15b的远端部的挂钩吊搬运物20。
25.图2是表示本实施方式的搬运物20以及框架部41的外观的立体图。
26.搬运物20是被作业设备1搬运的构造物,是引导系统30的引导对象物。搬运物20例如是预制件,例如是预制混凝土材料等。如图2所示,搬运物20例如是道路附带构造物,例如为u型槽等。多个搬运物20连续地(换句话说,成排的方式、成列的方式或者连结的方式)设置(换句话说,配置或安装)。以下,主要对搬运物20为u型槽的情况进行说明。搬运物20具备沟槽部21、底部23、侧部25。
27.关于搬运物20的方向,有前后方向x、横向y、上下方向z。另外,关于被安装在搬运物20的引导系统30的方向也相同。在搬运物20被放置在水平面的情况下,将与垂直方向一致的方向设为上下方向z、将垂直上侧设为上侧z1、将垂直下侧设为下侧z2。另外,搬运物20没有必要一定被放置在水平面。将与上下方向z正交的方向且是搬运物20的某一方向设为前后方向x。前后方向x例如既可以是搬运物20的长度方向,也可以是沟槽部21延伸的方向。将前后方向x的一侧设为前侧xf。将分别与前后方向x以及上下方向z正交的方向设为横向y。在横向y,将远离搬运物20的横向y的中央部的那侧设为横向外侧yo。
28.关于搬运物20的旋转角有翻转角(roll angle)、俯仰角(pitch angle)、偏航角(yaw angle)。另外,关于被安装在搬运物20的引导系统30也相同。将在前后方向x延伸的旋转轴设为翻转轴,将在横向y延伸的旋转轴设为俯仰轴,将在上下方向z延伸的旋转轴设为偏航轴。翻转角是搬运物20绕翻转轴的旋转角。俯仰角是搬运物20绕俯仰轴的旋转角。偏航角是搬运物20绕偏航轴的旋转角。偏航角是俯视(plan view)搬运物20时的旋转角,换句话说,是从上下方向z看到的搬运物20的旋转角。
29.沟槽部21是从前后方向x看到的具有u字形的内面的沟槽。沟槽部21在前后方向x延伸。底部23是搬运物20的下侧z2部分,构成沟槽部21的底面。侧部25是搬运物20的横向外侧yo的两侧部分,构成沟槽部21的侧面。
30.图3是表示本实施方式的引导系统30的构成的方框图。
31.引导系统30是使搬运物20移动到基于用曲线以及折线的至少其中之一表示的目标线的目标位置的系统。如图3所示,引导系统30具备引导装置40、控制器50、存储器52、输入部61、操作部63、通知部65。
32.引导装置40,如图2所示,被安装在搬运物20。引导装置40可自由装卸地安装于搬运物20,例如,被载置在搬运物20的上侧z1部分上。例如,引导装置40是独立于图1所示的附属装置15的装置。另外,引导装置40也可以与附属装置15一体构成,例如也可以与夹持装置15c一体构成。引导装置40具备框架部41、检测部43、显示部45。
33.框架部41是被安装在搬运物20的构造物。如图2所示,框架部41例如为大致板状等。框架部41具备大致呈板状的框架部主体41a和定位部41b。
34.定位部41b是用于进行引导装置40相对于搬运物20的定位的部件。定位部41b,在将引导装置40安装到搬运物20时,以使检测部43与搬运物20的相对位置落入到一定范围内的方式,换句话说,以使相对位置总是基本上恒定的方式而构成。定位部41b被固定在框架部主体41a。定位部41b从框架部主体41a的端部向下侧z2延伸。定位部41b例如具备前面定位部41b1和侧面定位部41b2。
35.前面定位部41b1,在将框架部41安装到搬运物20时,被配置成与搬运物20的前侧xf部分(例如前面)平行,可与搬运物20的前侧xf部分接触。前面定位部41b1从框架部主体
41a的前侧xf的端部向下侧z2延伸。侧面定位部41b2,在将框架部41安装到搬运物20时,被配置成与搬运物20的横向外侧yo部分换句话说搬运物20的侧面平行,可与搬运物20的横向外侧yo部分换句话说搬运物20的侧面接触。侧面定位部41b2从框架部主体41a的横向外侧yo的端部向下侧z2延伸。侧面定位部41b2既可以设置在框架部主体41a的横向外侧yo的两侧(左右),也可以只设置在其中一侧。
36.检测部43检测搬运物20的坐标以及搬运物20的方向的至少其中之一。本实施方式的检测部43检测搬运物20的坐标以及搬运物20的方向。检测部43检测出的搬运物20的坐标是表示搬运物20的三维位置的坐标(位置坐标)。检测部43检测出的搬运物20的方向是搬运物20的姿势或倾斜角例如搬运物20的翻转角、俯仰角以及偏航角。检测部43被安装在框架部41。检测部43通过框架部41被安装在搬运物20。检测部43例如具备棱体(prism member)43a和角度传感器43b。
37.棱体43a是用于检测搬运物20的坐标的部件。进一步详细而言,图3所示的测量器60检测棱体43a的坐标并将棱体43a的坐标信息输出到控制器50。测量器60例如是全站仪(total station)。测量器60通过无线或有线与控制器50可通信地连接。而且,控制器50基于棱体43a的坐标信息计算搬运物20的坐标。
38.角度传感器43b用于检测搬运物20的方向,例如,检测搬运物20的翻转角、俯仰角以及偏航角的至少其中之一。在角度传感器43b检测搬运物20的偏航角的情况下,角度传感器43b既可以通过利用地磁检测出偏航角,也可以基于在水平面的旋转加速度等计算出偏航角。角度传感器43b将检测到的角度信息输出到控制器50。角度传感器43b通过无线或有线与控制器50可通信地连接。
39.另外,检测部43,只要能检测出搬运物20的坐标以及搬运物20的方向,可以任意地构成。例如,可以任意地设定棱体43a的数量以及角度传感器43b可检测的旋转角的轴的数量。根据棱体43a的数量以及棱体43a相对于搬运物20的位置等,也可以不设置角度传感器43b。而且,检测部43也可以利用卫星测位系统来检测搬运物20的坐标以及搬运物20的方向的至少其中之一。
40.而且,检测部43也可以包含相机或光探测和测距(lidar:light detection and ranging)。控制器50也可以,通过对由相机或光探测和测距获取的图像进行解析,检测搬运物20的坐标以及搬运物20的方向的至少其中之一。
41.显示部45显示使搬运物20应该移动的方向。换句话说,显示部45进行使搬运物20向应该移动的方向的移动指示。换句话说,显示部45进行使搬运物20向应该移动的方向的引导显示。关于使搬运物20应该移动的方向将在以后说明。显示部45基于控制器50的输出进行显示。显示部45通过无线或有线与控制器50可通信地连接。显示部45既可以是表示了规定图形的发光部,也可以是显示规定图形的画面。规定图形例如是表示使搬运物20应该移动的方向的图形,例如,既可以包含箭头也可以包含三角形等。
42.显示部45例如被设置在框架部41。在这种情况下,可以让作业人员一边视觉识别搬运物20一边视觉识别显示部45的显示。作业人员既可以是作业设备1的操作人员,也可以是在搬运物20附近进行与搬运物20相关的作业的作业人员(现场作业人员)。另外,显示部45也可以独立于框架部41而设置。显示部45既可以与控制器50一体构成,也可以独立于控制器50。显示部45也可以是包含控制器50的便携式设备的显示画面。显示部45既可以配置
在驾驶室13a的内部,也可以配置在驾驶室13a的外部。
43.存储器52例如是闪存或磁盘装置,用于存储各种程序以及信息,作为控制器50的工作存储器而起作用。
44.存储器52预先存储与目标线有关的目标线信息d1,该目标线表示搬运物20的设置目标并用曲线以及折线的至少其中之一表示。
45.控制器50进行信号的输入输出、信息处理以及运算等。例如,在控制器50被输入检测部43的检测结果等。例如,在控制器50被输入目标线的信息(目标线信息d1)等。即,控制器50获取通过检测部43检测到的搬运物20的坐标以及搬运物20的方向的至少其中之一。而且,控制器50从存储器52获取目标线信息d1。
46.控制器50既可以设置在作业设备1的内部,也可以设置在作业设备1的外部。控制器50也可以被包含在作业人员所携带的便携式设备中。便携式设备例如是平板电脑或智能手机等。携带便携式设备的作业人员既可以是操作设备1的操作人员,也可以是现场作业人员。
47.输入部61将搬运物信息d7输入到控制器50。搬运物信息d7是包含搬运物20的尺寸的有关搬运物20的信息。搬运物信息d7的详细情况将在以后说明。输入部61也可以自动地获取或计算出搬运物信息d7。例如,输入部61也可以是从设在搬运物20上的电子标签读取搬运物信息d7的读取装置。电子标签,例如,既可以嵌在搬运物20,也可以贴在搬运物20。输入部61也可以是通过解析搬运物20的图像能够计算出搬运物信息d7的图像解析装置。输入部61也可以是例如用于受理作业人员对搬运物信息d7的输入的输入装置。输入装置例如是键盘或触摸面板等。
48.操作部63被作业人员操作,用于操作控制器50。操作部63受理后述的引导开始的指示、引导模式的选择以及作为搬运物20的引导对象的点的选择等。操作部63既可以与控制器50一体构成,也可以独立于控制器50。操作部63也可以是包含控制器50的便携式设备的触摸面板等。操作部63既可以配置在驾驶室13a的内部,也可以配置在驾驶室13a的外部。操作部63也可以是例如设置在用于操作作业设备1的操作杆上的开关。
49.通知部65输出通过控制器50进行的通知或警告等。通知部65既可以通过显示进行通知,也可以通过声音进行通知。通知部65既可以设置在框架部41,也可以独立于框架部41而另外设置。通知部65既可以根据通知或警告的内容分别设置,也可以兼顾多种通知或警告。通知部65既可以与控制器50一体构成,也可以独立于控制器50。通知部65既可以配置在驾驶室13a的内部,也可以配置在驾驶室13a的外部。
50.图3所示的引导系统30如下所述进行动作。引导系统30的(主要是控制器50的)动作的概要如下所述。控制器50基于目标线信息d1计算目标信息d3,目标信息d3是与搬运物20的目标坐标相关的信息和与搬运物20的目标方向相关的信息的至少其中之一。
51.控制器50,基于通过检测部43检测到的搬运物20的坐标以及搬运物20的方向的至少其中之一,计算作为可与目标信息d3进行对比的信息即搬运物20的检测信息d5。另外,控制器50,基于通过检测部43检测到的搬运物20的坐标以及搬运物20的方向的至少其中之一,在必要时还基于搬运物信息d7,计算搬运物20的检测信息d5。即,控制器50,也可以基于通过检测部43检测到的搬运物20的坐标以及搬运物20的方向的至少其中之一和通过输入部61输入的搬运物信息d7,计算检测信息d5。
52.例如,控制器50从测量器60获取被安装在框架部41的棱体43a在三维空间内的坐标信息(检测信息d5)。而且,控制器50从被安装在框架部41的角度传感器43b获取搬运物20的翻转角、俯仰角以及偏航角的角度信息(检测信息d5)。框架部41相对于搬运物20的安装位置被预先决定。为此,控制器50可以基于包含坐标信息以及角度信息的检测信息d5和表示搬运物20的尺寸的搬运物信息d7,计算搬运物20在三维空间内的位置坐标。
53.控制器50计算检测信息d5相对于目标信息d3的偏差d9。控制器50使显示部45显示让偏差d9变小的搬运物20的移动方向。引导系统30包含基于搬运物20的坐标引导搬运物20的移动方向的情况和基于搬运物20的方向(偏航角)引导搬运物20的移动方向的情况。引导系统30的动作的详细情况如下所述。
54.控制器50获取目标线信息d1。在通过引导系统30进行引导之前,存储器52中预先存储有目标线信息d1。目标线信息d1是表示搬运物20的设置目标的目标线l的信息。进一步详细而言,目标线信息d1是表示目标线l在表示作业现场的位置的坐标系(现场坐标系)的三维位置的信息。目标线l包含曲线以及折线的至少其中之一。另外,目标线l也可以仅是直线。
55.控制器50基于目标线信息d1计算目标信息d3。目标信息d3是与搬运物20的目标相关的信息。例如,目标信息d3也可以是与搬运物20的目标坐标相关的信息(目标坐标信息)(例a1)。在这种情况下,目标信息d3具体而言例如是目标线l所包含的任意的点的坐标(目标线l上的每个点的坐标)的信息等。而且,例如,目标信息d3既可以是与搬运物20的目标方向相关的信息(目标方向信息),也可以是与搬运物20的目标偏航角相关的信息(目标偏航角信息)(例a2)。在这种情况下,目标信息d3既可以是作为曲线的目标线l的切线方向的信息,也可以是作为折线的目标线延伸的方向的信息。目标信息d3的详细内容将在以后说明。
56.控制器50基于检测部43的检测值计算检测信息d5。控制器50也可以基于检测部43的检测值以及搬运物信息d7计算检测信息d5。检测信息d5是可以与目标信息d3进行对比的信息。例如,在目标信息d3是与搬运物20的目标坐标相关的信息(目标坐标信息)的情况下,检测信息d5是与检测部43检测到的搬运物20的坐标相关的信息(检测坐标信息)(例b1)。在这种情况下,检测信息d5是与搬运物20所包含的特定的点(特定点)并且是进行引导所需的点(例如图6所示的中间点20e等)的坐标相关的信息。另外,对于搬运物20所包含的点但进行引导并不是必须的点的坐标,也可以不进行计算,也可以不包含在检测信息d5中。而且,例如,在目标信息d3是与搬运物20的目标偏航角相关的信息(目标偏航角信息)的情况下,检测信息d5是与检测部43检测到的搬运物20的偏航角相关的信息(检测偏航角信息)(例b2)。
57.当控制器50计算检测信息d5时,不仅需要检测部43的检测值,有时还需要搬运物信息d7。搬运物信息d7包含搬运物20的尺寸。进一步详细而言,搬运物信息d7包含搬运物20的外形的尺寸,具体而言,包含搬运物20在图2所示的前后方向x、横向y以及上下方向z的尺寸。搬运物信息d7包含搬运物20的三维形状的信息。搬运物信息d7也可以包含表示检测部43与搬运物20的相对位置的信息。搬运物信息d7被从输入部61输入到控制器50。另外,搬运物信息d7的一部分也可以预先存储到存储器52。例如,在搬运物20为u型槽的情况下,可以将从图2所示的前后方向x看到的u型槽的形状预先存储到存储器52,也可以将前后方向x的长度从输入部61输入到控制器50。
58.控制器50计算检测信息d5相对于目标信息d3的偏差d9。例如,在目标信息d3以及检测信息d5分别为坐标的信息的情况下,控制器50计算检测坐标信息(参照上述例b1)相对于目标坐标信息(参照上述例a1)的偏差d9(两点之间的距离)(例c1)。而且,例如,在目标信息d3以及检测信息d5分别为偏航角的信息的情况下,控制器50计算检测偏航角信息(参照上述例b2)相对于目标偏航角信息(参照上述例a2)的偏差d9(偏航角之差)(例c2)。
59.控制器50使显示部45显示使搬运物20应该移动的方向,具体而言,为使偏差d9变小的搬运物20的移动方向(平行移动或旋转移动的朝向)。移动方向包含使搬运物20平行移动的方向或使搬运物20旋转移动的方向。作业设备1的操作人员按照显示部45的显示使搬运物20移动。于是,搬运物20接近目标位置,目标信息d3与检测信息d5接近,偏差d9变成小于规定值。换句话说,偏差d9变成小于允许值或大致为零。即,目标信息d3和检测信息d5处于一致状态。控制器50,在目标信息d3和检测信息d5变为一致状态时,也可以向通知部65输出表示两者变为一致状态的通知。通知部65也可以通知搬运物20的检测位置与设置目标位置达到了一致。例如,通知部65也可以显示搬运物20的检测位置与设置目标位置达到了一致。
60.控制器50,当搬运物20的任意的点的坐标在俯视时相对于目标线l从一侧越到了另一侧(与一侧相反的那侧)时(偏离时),使通知部65输出警告。该警告例如可以由通知部65输出,例如既可以作为显示进行输出,也可以作为声音进行输出。在搬运物20为道路附带构造物的情况下,基于该警告,可以获得以下的效果。通常,道路的宽度被设定为规定的宽度。此时,如果在应该为道路的位置设置搬运物20,道路的宽度就无法成为规定的宽度。在此,例如在道路和搬运物20之间的边界处等设定目标线l。而且,一旦搬运物20从目标线l越到了道路侧,通知部65就输出警告。由此,当作业人员使搬运物20移动从目标线l越到了道路侧时,可以对作业人员进行警告。
61.控制器50将目标信息d3与检测信息d5达到一致状态时与搬运物20相关的信息即设置信息d11存储到存储器52。设置信息d11例如包含通过检测部43检测到的搬运物20的坐标、通过检测部43检测到的搬运物20的方向以及作为包含搬运物20的尺寸信息的搬运物信息d7。设置信息d11也可以包含设置搬运物20的日期以及时间等信息。设置信息d11也可以包含后述的基准偏航角的信息。
62.以下,对本实施方式的具体实施例进行说明。
63.第一实施例在本实施方式的第一实施例,沿着曲线状的目标线的外侧设置多个搬运物20,并基于搬运物20的坐标计算检测信息。
64.图4是在本实施方式的第一实施例、俯视在目标线li的外侧设置搬运物20之前的作业现场时的示意图。图5是俯视在将点20b与点s20b对齐的状态下的作业现场时的示意图,点20b是接近图4所示的搬运物20的基准构造物s20的端且接近目标线li的点,点s20b是设置了基准构造物s20的搬运物20的端且接近目标线li的点。图6是俯视图5所示的搬运物20被沿着目标线li而设置的状态的作业现场时的示意图。
65.在图6所示的第一实施例,以形成曲线(或者大致曲线)的方式连续地设置多个搬运物20以及基准构造物s20。而且,以使多个搬运物20在曲线的内侧部分即将曲线的一部分视为圆弧时接近圆弧的中心的部分沿着目标线li的方式来设置搬运物20。另外,在第一实
施例,将该设置称为目标线内侧设置。即,沿着曲线状的目标线li的外侧设置多个搬运物20。以下,对第一实施例的用于进行目标线内侧设置的步骤进行说明。
66.如图4所示,在作业现场预先设置作为设置搬运物20时的基准的基准构造物s20。当通过检测部43检测到搬运物20的坐标以及搬运物20的方向的至少其中之一时,将以使目标信息d3与检测信息d5变为一致状态的方式而设置的搬运物20作为基准构造物s20。基准构造物s20是可以安装检测部43的构造物,进一步详细而言,是可以经由框架部41安装检测部43的构造物。基准构造物s20,当被安装有检测部43并通过检测部43检测到基准构造物s20的坐标以及基准构造物s20的方向的至少其中之一时,被设置成使目标信息d3和可与目标信息d3进行对比的信息即检测信息d5变为一致状态,所述目标信息d3是与基准构造物s20的目标坐标相关的信息以及与基准构造物s20的目标方向相关的信息的至少其中之一。
67.另外,基准构造物s20也可以通过引导系统30进行引导搬运至目标位置的方式来设置。基准构造物s20也可以是搬运物20。而且,基准构造物s20也可以不必使用引导系统30就设置在目标位置。例如,也可以将基准构造物s20设置在作业现场的被预先决定的基准位置。
68.引导装置40被安装在搬运物20。例如,在引导装置40为独立于附属装置15的装置的情况下,可以通过作业人员的手工作业将引导装置40安装到搬运物20。在引导装置40与附属装置15为一体构成的情况下,作业设备1的操作人员通过操作附属装置15将引导系统30安装到搬运物20。在将引导装置40安装到搬运物20之后,根据需要,进行检测部43的校准。另外,关于检测部43的校准将在以后进行说明。作业人员(作业设备1的操作人员或现场作业人员)通过对操作部63进行操作来选择引导模式。具体而言,作业人员选择目标线内侧设置模式。
69.图6所示的状态是将基准构造物s20与搬运物20相邻而设置的状态,即,将搬运物20设置在目标位置的目标状态。在该目标状态,将在俯视时搬运物20的四个角之中远离基准构造物s20一侧的端且接近目标线li一侧的角设为点20d。另外,在该目标状态,将俯视时搬运物20的四个角之中接近基准构造物s20一侧的端且接近目标线li一侧的角设为点20b。而且,在该目标状态,将俯视时基准构造物s20的四个角之中设置有搬运物20一侧的端且接近目标线li一侧的角设为点s20b。
70.控制器50,基于检测信息d5以及搬运物信息d7,计算图4所示的搬运物20的点20b以及点20d的坐标。而且,控制器50计算出通过点20b以及点20d的直线lbd的公式。另外,在图4等中,直线lbd被记述为相对于搬运物20的侧面(图2的横向外侧yo的面)稍微偏离,但是,实际上直线lbd与搬运物20的侧面一致。
71.首先,对搬运物20的点20b的位置对齐进行说明。
72.在图4以及图5,作业设备1的操作人员以让搬运物20的点20b接近目标位置的方式使搬运物20移动。具体而言,目标位置是基准构造物s20的点s20b。此时,操作人员也可以通过目视来使搬运物20移动,以便使搬运物20的点20b接近基准构造物s20的点s20b。而且,此时,操作人员也可以在引导系统30的引导下使搬运物20移动,以便使搬运物20的点20b接近基准构造物s20的点s20b。在接受引导的情况下,操作人员通过对操作部63进行操作,选择搬运物20的点20b作为成为引导的对象的点。而且,引导系统30以使搬运物20的点20b接近基准构造物s20的点s20b的方式进行引导。
73.基准构造物s20的点s20b的位置(坐标)也可以预先存储到存储器52。控制器50也可以基于基准构造物s20的检测信息d5和基准构造物s20的搬运物信息d7,计算基准构造物s20的点s20b的位置。控制器50也可以将计算出的基准构造物s20的点s20b的位置存储到存储器52。在这种情况下,为了计算基准构造物s20的点s20b的位置,将引导装置40安装到基准构造物s20。
74.另外,关于基准构造物s20与搬运物20在上下方向z的位置对齐,既可以通过操作人员的目视来进行,也可以由操作人员一边接受引导系统30的引导一边进行。
75.接着,对搬运物20向目标线li的位置对齐进行说明。
76.操作人员,通过对操作部63进行操作,向控制器50指示开始引导功能。例如,操作人员按下操作部63的引导开始按钮。由此,控制器50进行各种运算。
77.控制器50计算与搬运物20的目标坐标相关的信息作为目标信息d3。具体而言,控制器50计算目标线li上的多个点的坐标作为目标信息d3(目标坐标信息)。
78.而且,控制器50,基于通过检测部43检测到的搬运物20的坐标、通过检测部43检测到的搬运物20的方向以及通过输入部61输入的搬运物信息d7,计算与搬运物20所包含的特定的点的坐标相关的信息作为检测信息d5。控制器50计算图5所示的直线lbd上的点的坐标作为检测信息d5(检测坐标信息)。该检测信息d5例如也可以是直线lbd上的等间隔的多个点的坐标。而且,在目标线li为圆弧状等的情况下,该检测信息d5也可以是直线lbd上的点例如点20b与点20d之间的中间点20e的坐标。控制器50计算目标线li与直线lbd之间的最短距离作为偏差d9。而且,控制器50使显示部45显示让偏差d9变小的搬运物20的移动方向。
79.作业设备1的操作人员,按照引导(显示部45的显示)使搬运物20移动。此时,在搬运物20的至少一部分移动到比目标线li位于内侧,即,将目标线li的一部分视为圆弧时接近圆弧的中心的一侧的情况下,控制器50使通知部65输出警告。另外,操作人员最好在使搬运物20的点20b与基准构造物s20的点s20b相互接触的状态下,以让搬运物20接近目标线li的方式使搬运物20移动。
80.如果操作人员按照引导使搬运物20移动,偏差d9就会小于规定值。换句话说,目标信息d3和检测信息d5处于一致状态。在图6所示的例子,俯视时,搬运物20的直线lbd与目标线li相接(或大致相接)。另外,在图6中,点20b与点20d的中间点20e是直线lbd与目标线li的接点,但是,中间点20e并不局限于直线lbd与目标线li之间的接点。如果目标信息d3和检测信息d5处于一致状态,控制器50就使显示部45和通知部65的至少其中之一输出表示处于一致状态的通知。
81.然后,操作人员释放搬运物20。具体而言,解除夹持装置15c对搬运物20的夹持,或者,解除附属装置15对搬运物20的吊装。操作人员,通过对操作部63进行操作,向控制器50指示结束引导功能。例如,作业人员再次按下操作部63的引导开始按钮。如果目标信息d3和检测信息d5处于一致状态,控制器50就将设置信息d11存储到存储器52。
82.如图6所示,在将搬运物20设置在目标位置之后,现场作业人员例如进行下一个作业。现场作业人员调整搬运物20的翻转角以及俯仰角(倾斜)。现场作业人员例如以使水可以流过沟槽部21的方式调整搬运物20的俯仰角。现场作业人员,在确认到已将搬运物20按照目标进行了设置之后,从搬运物20卸下引导装置40,并将引导装置40安装到下一个将要设置的搬运物20上。而且,现场作业人员进行填埋多个搬运物20之间的缝隙(接缝)的作业。
83.第二实施例本实施方式的第二实施例,沿着曲线状的目标线的内侧设置多个搬运物20,并基于搬运物20的坐标计算检测信息。
84.图7是在本实施方式的第二实施例、俯视将搬运物20设置在目标线li的内侧之前的作业现场时的示意图。图8是俯视在将点20b与点s20b对齐的状态下的作业现场的示意图,点20b是接近图7所示的搬运物20的基准构造物s20一侧的端且远离目标线lo的点,s20b是设置有基准构造物s20的搬运物20一侧的端且远离目标线lo的点。图9是俯视将图8所示的搬运物20沿着目标线lo设置的状态下的作业现场时的示意图。
85.在图9所示的第二实施例,以形成曲线(或大致曲线)的方式连续地设置多个搬运物20以及基准构造物s20。而且,以让多个搬运物20的曲线的外侧部分,即,将曲线的一部分视为圆弧时远离圆弧的中心的一侧的部分沿着目标线lo的方式,设置搬运物20。另外,在第二实施例,将该设置称为目标线外侧设置。即,沿着曲线状的目标线lo的内侧设置多个搬运物20。以下,对第二实施例的用于进行目标线外侧设置的步骤进行说明。另外,在第二实施例,主要对与第一实施例不同之处进行说明。
86.如图7所示,引导装置40与第一实施例同样地安装在搬运物20。而且,作业人员通过对操作部63进行操作,选择引导模式。具体而言,作业人员选择目标线外侧设置模式。
87.图9所示的状态是使基准构造物s20和搬运物20相邻而设置的状态,即,搬运物20被设置在目标位置的目标状态。在该目标状态,将俯视时搬运物20的四个角之中远离基准构造物s20一侧的端且接近目标线lo一侧的角设为点20c。而且,在该目标状态,将俯视时搬运物20的四个角之中的接近基准构造物s20一侧的端且接近目标线lo一侧的角设为点20a。而且,在该目标状态,将俯视时搬运物20的四个角之中的接近基准构造物s20一侧的端且远离目标线lo一侧的角设为点20b。另外,在该目标状态,将俯视时基准构造物s20的四个角之中设置有搬运物20一侧的端且远离目标线lo一侧的角设为点s20b。
88.控制器50,基于检测信息d5以及搬运物信息d7,计算图7所示的点20a、点20b以及点20c的坐标。另外,在第一实施例,控制器50计算出图4所示的直线lbd的公式。而在第二实施例,因为在图9所示的目标状态时点20a以及点20c与目标线lo相接(或大致相接),所以,控制器50不需要计算连接点20a和点20c的直线lac的公式。另外,控制器50也可以计算连接点20a和点20c的直线lac的公式。
89.首先,对搬运物20的点20b的位置对齐进行说明。
90.与第一实施例相同,在图7以及图8,作业设备1的操作人员以让搬运物20的点20b接近目标位置的方式使搬运物20移动。具体而言,目标位置是基准构造物s20的点s20b。
91.其次,对搬运物20向目标线lo的位置对齐进行说明。
92.操作人员,通过对操作部63进行操作,向控制器50提示开始引导功能。例如,操作人员按下操作部63的引导开始按钮。由此,控制器50进行各种运算。具体而言,控制器50计算在目标线lo上的多个点的坐标作为目标信息d3(目标坐标信息)。而且,控制器50计算点20c的坐标作为检测信息d5(检测坐标信息)。控制器50计算目标线lo与点20c的坐标之间的最短距离作为偏差d9。并且,与第一实施例同样,控制器50使显示部45显示让偏差d9变小的搬运物20的移动方向。
93.操作人员按照引导使搬运物20移动。另外,操作人员最好在让搬运物20的点20b与
基准构造物s20的点s20b相互接触的状态下,以使搬运物20的点20c接近目标线lo的方式使搬运物20移动。
94.第三实施例在本实施方式的第三实施例,基于搬运物20的方向计算检测信息。
95.引导系统30也可以基于搬运物20的偏航角引导搬运物20的移动方向。另外,在第三实施例,主要对与第一实施例不同之处进行说明。
96.首先,对搬运物20的点20b的位置对齐进行说明。
97.与第一实施例相同,作业设备1的操作人员以让图4所示的搬运物20的点20b接近目标位置的方式使搬运物20移动。具体而言,目标位置是基准构造物s20的点s20b。
98.其次,对搬运物20向目标线l的位置对齐进行说明。
99.控制器50基于目标线l计算目标信息d3(目标偏航角信息)。控制器50计算与俯视时搬运物20的目标方向相关的信息作为目标信息d3。
100.例如,如图6所示,在为目标线内侧设置模式的情况下,控制器50将在俯视时直线lbd与目标线li接触时的直线lbd的方向作为目标信息d3(目标偏航角信息)(例d1)。
101.而且,例如,如图9所示,在为目标线外侧设置模式的情况下,在目标状态下,在俯视时搬运物20的点20a以及点20c与目标线lo接触。在此,控制器50将在目标状态时的通过点20a以及点20c的直线lac的方向作为目标信息d3(目标偏航角信息)(例d2)。
102.图10是在本实施方式的第三实施例、俯视将搬运物设置在折线状的目标线l的内侧之前的作业现场时的示意图。
103.例如,如图10所示,在目标线l为折线状或直线的情况下,控制器50将目标线l延伸的方向作为目标信息d3(目标偏航角信息)(例d3)。另外,上述的目标线l延伸的方向是目标线l之中作为搬运物20的设置的基准的部分,在图10所示的例子中为点20a以及点20c接触的部分。
104.而且,控制器50计算与俯视时的搬运物20的方向相关的信息作为检测信息d5。控制器50,基于通过检测部43检测到的搬运物20的偏航角(检测偏航角),计算检测信息d5(检测偏航角信息)。而且,控制器50计算检测偏航角信息相对于目标偏航角信息的偏差d9。而且,控制器50使显示部45显示让偏差d9变小的搬运物20的移动方向。操作人员按照引导使搬运物20移动。此时,操作人员按照引导使搬运物20旋转移动。
105.在该第三实施例,对于图10所示的搬运物20的点20b与基准构造物s20的点s20b的位置对齐,进行基于坐标的引导。而且,在将搬运物20的检测信息d5的偏航角与目标信息d3的偏航角对齐时,进行基于偏航角的引导。如此,引导系统30也可以进行基于坐标的引导和基于偏航角的引导。而且,引导系统30也可以在进行基于坐标的引导的同时进行基于偏航角的引导。在这种情况下,也可以分别地设置为了进行基于坐标的引导而显示搬运物20的平行移动的方向的显示部45和为了进行基于偏航角的引导而显示向搬运物20的偏航方向的旋转移动的方向的显示部45。
106.接着,对偏航角的关联(校准)进行说明。
107.检测部43的检测值的坐标系(传感器坐标系)与存储在存储器52的目标线l的坐标系(现场坐标系)有时存在不一致的情况。进一步详细而言,作为搬运物20在俯视时的方向也是检测部43检测出的方向(检测偏航角)的基准的方向和作为俯视时的目标线l的方向的
基准的方向有时存在不一致的情况。具体而言,例如,在传感器坐标系是以检测部43的电源接通时的朝向为基准的坐标系、现场坐标系是以朝北为基准的坐标系等的情况下,传感器坐标系与现场坐标系不一致。在此,控制器50进行使传感器坐标系与现场坐标系相互关联的校准处理。
108.图11是用于说明使传感器坐标系与现场坐标系相互关联的校准处理的示意图。
109.首先检测图11所示的基准构造物s20的基准偏航角θ1。基准偏航角θ1是基准构造物s20在俯视时的方向(偏航角),也是通过检测部43检测到的方向。进一步详细而言,引导装置40被安装到基准构造物s20。而且,检测部43检测基准构造物s20的偏航角。此时,通过检测部43检测到的偏航角是基准偏航角θ1。
110.控制器50将基准构造物s20在俯视时的方向也是通过检测部43检测到的方向即基准偏航角θ1存储(保存)到存储器52。控制器50,基于被存储在存储器52的基准偏航角θ1,计算搬运物20的目标信息d3以及检测信息d5的至少其中之一。进一步详细而言,控制器50,基于基准偏航角θ1,将传感器坐标系与现场坐标系相互关联。具体而言,控制器50将传感器坐标系的基准偏航角θ1与现场坐标系的基准构造物s20的偏航角φ1相互关联(相对应、链接)。现场坐标系的基准构造物s20的偏航角φ1是被预先存储到存储器52的值。例如,控制器50也可以计算直线lbd在现场坐标系的偏航角φ1,所述直线lbd通过基于坐标信息计算出的基准构造物s20的点20b以及点20d。控制器50也可以将现场坐标系的基准构造物s20的偏航角φ1存储到存储器52。
111.以下的第四至第六实施例表示利用了将传感器坐标系与现场坐标系相互关联的校准处理的引导方法。
112.第四实施例本实施方式的第四实施例表示利用了基准构造物s20在传感器坐标系的偏航角与现场坐标系的偏航角的相互关联的第一引导方法。
113.在第四实施例,如下所示地进行基准偏航角θ1和基于搬运物20的检测偏航角的目标信息的计算。在此,将基准构造物s20作为第一个搬运物20而设置,从基准构造物s20开始依次连续地设置第二个搬运物20以及第三个搬运物20等。
114.首先,控制器50计算基准偏航角θ1(传感器坐标系)与基准构造物s20的偏航角φ1(现场坐标系)之间的差分即差分值(θ1-φ1)。其次,控制器50基于目标线l计算第二个搬运物20的目标偏航角φ2(现场坐标系)。其次,控制器50计算所计算出的目标偏航角φ2(现场坐标系)与差分值(θ1-φ1)之和即目标偏航角θ2(传感器坐标系)。而且,控制器50计算第二个搬运物20的检测信息d5即检测偏航角(传感器坐标系)相对于目标信息d3即目标偏航角θ2(传感器坐标系)的偏差d9。控制器50使显示部45显示让所计算出的偏差d9变小的第二个搬运物20的移动方向。另外,在上述对目标偏航角φ2(现场坐标系)加上了差分值,但是本发明并不局限于此。根据旋转方向(右转或左转)在坐标系中的正负的决定方法等,也有可能从目标偏航角φ2(现场坐标系)减去差分值。
115.对于第三个搬运物20也与第二个搬运物20同样地计算目标信息d3。具体而言,控制器50基于目标线l计算第三个搬运物20的目标偏航角φ3(现场坐标系)。其次,控制器50计算所计算出的目标偏航角φ3(现场坐标系)与差分值(θ1-φ1)之和即目标偏航角θ3(传感器坐标系)。而且,控制器50计算第三个搬运物20的检测信息d5即检测偏航角(传感器坐
标系)相对于目标信息d3即目标偏航角θ3(传感器坐标系)的偏差d9。控制器50使显示部45显示让所计算出的偏差d9变小的第三个搬运物20的移动方向。对于第四个以后的搬运物20也是同样地计算目标信息d3。
116.第五实施例本实施方式的第五实施例表示利用了基准构造物s20的传感器坐标系的偏航角与现场坐标系的偏航角的相互关联的第二引导方法。
117.在第五实施例,也可以如下所述地进行基准偏航角θ1和基于搬运物20的检测偏航角的目标信息的计算。
118.首先,控制器50基于目标线l计算第二个搬运物20的目标偏航角φ2(现场坐标系)。其次,控制器50计算所计算出的目标偏航角φ2(现场坐标系)与基准构造物s20的偏航角φ1(现场坐标系)之差δφ1(=φ2-φ1)。其次,控制器50计算该差δφ1与基准偏航角θ1之和即目标偏航角θ2(传感器坐标系)。然后,控制器50计算第二个搬运物20的检测信息d5即检测偏航角(传感器坐标系)相对于目标信息d3即目标偏航角θ2(传感器坐标系)的偏差d9。控制器50使显示部45上显示让所计算出的偏差d9变小的第二个搬运物20的移动方向。对于第三个以后的搬运物20也是同样地计算目标信息d3。
119.在连续设置多个搬运物20的情况下,假设第n(n为2以上的整数)个搬运物20的目标偏航角φn与第n-1个搬运物20的目标偏航角之差δφn为恒定值。具体而言,例如,在目标线l为圆弧状、目标线l的曲率为恒定、或者作为折线的目标线l的各弯曲部分的角度为恒定的情况下,差δφ1、δφ2、δφ3、
……ꢀ
依次增加恒定值。具体而言,例如,差δφ1、δφ2、δφ3、
……
,如5
°
、10
°
、15
°
、
……ꢀ
等所示,依次增加5
°
。在这种情况下,控制器50可以用恒定值
×
(n-1)计算第n个搬运物20的目标偏航角φn。
120.第六实施例本实施方式的第六实施例表示利用基准构造物s20的传感器坐标系的偏航角与现场坐标系的偏航角的相互关联计算坐标的第三引导方法。
121.控制器50,也可以基于与搬运物20相互关联的某个位置的坐标(例如,棱体43a的坐标)、搬运物20的方向、搬运物信息d7,计算搬运物20的特定的点的坐标。搬运物20的方向包含搬运物20的偏航角。在计算该偏航角时,控制器50也可以使用图11所示的基准偏航角θ1(传感器坐标系)与基准构造物s20的偏航角φ1(现场坐标系)之间的关系。
122.具体而言,例如,检测部43检测搬运物20的检测偏航角(例如θ2)(传感器坐标系)。而且,控制器50根据存储在存储器52中的基准偏航角θ1(传感器坐标系)以及基准构造物s20的偏航角φ1(现场坐标系)计算差分值(θ1-φ1)。而且,控制器50,通过从搬运物20的检测偏航角(例如,θ2)(传感器坐标系)减去差分值(θ1-φ1),计算搬运物20在现场坐标系的检测偏航角(例如,φ2)。控制器50基于在现场坐标系的检测偏航角(例如,φ2)计算搬运物20的特定的点的坐标。
123.另外,上述第四至第六实施例的具体的计算步骤可以进行各种变形。在图11所示的例子中,左转为正、右转为负,但是也可以左转为负、右转为正。而且,关于图3所示的翻转角以及俯仰角,因为传感器坐标系以及现场坐标系都以水平为基准作为前提,因此不需要进行坐标的变换。但是,关于翻转角以及俯仰角,在传感器坐标系与现场坐标系彼此不同的情况下,也可以与偏航角同样,使传感器坐标系与现场坐标系相互关联。
124.其次,对使用了引导系统30的搬运物20的设置与没有使用引导系统30的搬运物20的设置的比较进行说明。
125.在没有使用引导系统30设置搬运物20的情况下,设置桩作为搬运物20的设置位置的参照。而且,以桩为目标设置搬运物20。然而,在构造物的施工中,正在推广高精度化以及节省人力化,希望不使用桩也能高精度地设置搬运物20。而且,在进行不基于目标线l而是使搬运物20的特定的点移动到作为目标的点的引导的情况下,难以基于目标线l(例如,沿着目标线l)设置搬运物20。
126.而在本实施方式的引导系统30,控制器50,基于预先存储的目标线l的信息(目标线信息d1)自动地计算目标信息d3,并进行使目标信息d3与检测信息d5之间的差分变小的引导。由此,可以容易地进行基于目标线l的搬运物20的设置。
127.实施方式的总结本实施方式的技术的特征可以汇总如下。
128.本发明的一方面涉及的引导系统,包括:检测部,用于检测搬运物的坐标以及所述搬运物的方向的至少其中之一;控制器,获取通过所述检测部检测到的所述搬运物的坐标以及所述搬运物的方向的至少其中之一;显示部;以及,存储器,其中,所述存储器预先存储目标线信息,所述目标线信息表示所述搬运物的设置目标并且与用曲线以及折线的至少其中之一表示的目标线相关,所述控制器:基于所述目标线信息,计算作为与所述搬运物的目标坐标相关的信息以及与所述搬运物的目标方向相关的信息的至少其中之一的目标信息;基于通过所述检测部检测到的所述搬运物的坐标以及所述搬运物的方向的至少其中之一,计算作为可以与所述目标信息进行对比的信息的检测信息;计算所述检测信息相对于所述目标信息的偏差;使所述显示部显示让所述偏差变小的所述搬运物的移动方向。
129.根据该构成,由控制器基于与目标线相关的目标线信息自动地计算出搬运物的目标信息。而且,计算出检测信息相对于目标信息的偏差,使显示部显示让所计算出的偏差变小的搬运物的移动方向。因此,可以沿着目标线高精度地引导搬运物的移动方向。而且,作业人员按照被显示在显示部的移动方向使搬运物移动,可以沿着目标线高精度地设置搬运物。
130.而且,在所述的引导系统,也可以还包括:框架部,被安装在所述搬运物,其中,所述检测部被安装在所述框架部。
131.根据该构成,因为检测部被安装在被安装于搬运物的框架部,能更高精度地检测出搬运物的坐标以及搬运物的方向的至少其中之一。而且,只需将框架部安装到搬运物,就可以容易地检测出搬运物的坐标以及搬运物的方向的至少其中之一。
132.而且,在所述的引导系统,也可以还包括:输入部,将作为包含所述搬运物的尺寸的信息的搬运物信息输入到所述控制器,其中,所述控制器:计算与所述搬运物的所述目标坐标相关的信息作为所述目标信息;基于通过所述检测部检测到的所述搬运物的坐标、通过所述检测部检测到的所述搬运物的方向以及通过所述输入部输入的所述搬运物信息,计算与所述搬运物所包含的特定的点的坐标相关的信息作为所述检测信息。
133.根据该构成,根据搬运物的尺寸可以确定搬运物的形状,能以使搬运物的特定的点的坐标接近目标线的方式引导搬运物的移动方向。
134.而且,在所述的引导系统,也可以是,所述控制器:计算在俯视时与所述搬运物的
所述目标方向相关的信息作为所述目标信息;计算在俯视时与所述搬运物的方向相关的信息作为所述检测信息。
135.根据该构成,能以使俯视时的搬运物的检测方向接近俯视时的搬运物的目标方向的方式引导搬运物的移动方向。在这种情况下,控制器没有必要计算搬运物的坐标。因此,与基于坐标的引导相比,可以消减控制器的计算量。
136.而且,在所述的引导系统,也可以是,在通过所述检测部检测到所述搬运物的坐标以及所述搬运物的方向的至少其中之一时,将以让所述目标信息与所述检测信息达到一致状态的方式而设置的所述搬运物作为基准构造物,所述控制器:将作为所述基准构造物在俯视时的方向也是通过所述检测部检测到的方向的基准偏航角存储到所述存储器;基于存储在所述存储器中的所述基准偏航角,计算所述搬运物的所述目标信息以及所述检测信息的至少其中之一。
137.根据该构成,可以消减针对每个搬运物检测基准偏航角的麻烦。进一步详细而言,在搬运物的检测偏航角的坐标系与目标线的坐标系不同的情况下,需要使坐标系与其中一方一致。在搬运以及设置多个搬运物的情况下,针对每个搬运物检测使坐标系一致的基准值(基准偏航角)非常麻烦。在此,基准构造物的基准偏航角被存储在存储器,可以基于被存储在存储器中的基准偏航角计算搬运物的目标信息以及检测信息的至少其中之一。因此,可以消减针对每个搬运物检测基准偏航角的麻烦。
138.而且,在所述的引导系统,也可以是,所述控制器,将所述目标信息与所述检测信息达到一致状态时的与所述搬运物相关的信息即设置信息存储到所述存储器。
139.在将搬运物设置在目标位置之后,为了进行例如循证管理等,有时需要通过测量获取与搬运物相关的信息。在此,将目标信息与检测信息达到一致状态时的与搬运物相关的设置信息存储到存储器。因此,作业人员不需要实际测量被设置的搬运物,就可以容易地获取与搬运物相关的信息。
140.而且,在所述的引导系统,也可以是,所述设置信息包含通过所述检测部检测到的所述搬运物的坐标、通过所述检测部检测到的所述搬运物的方向以及包含所述搬运物的尺寸的信息即搬运物信息。
141.根据该构成,可以广泛地利用设置信息。例如,根据设置信息可以计算出搬运物的任意的点的坐标。因为计算出的搬运物的任意的点的坐标被存储在存储器中,作业人员不需要另外进行为了循证管理的测量,可以消减工作量。
142.而且,在所述的引导系统,也可以是还包括通知部,其中,所述控制器,当所述搬运物的任意的点的坐标在俯视时相对于所述目标线从一侧越到了另一侧时,使所述通知部输出警告。
143.根据该构成,可以防止将搬运物设置在偏离目标线的位置。
144.上述实施方式也可以进行各种变形。也可以变更上述实施方式的各构成要素的配置或形状。例如,也可以变更图3等所示的各构成要素的连接。例如,控制器50进行各处理(计算等)的顺序既可以是上述说明的顺序,也可以不是上述说明的顺序。例如,即可以变更构成要素的数量,也可以不设置构成要素的一部分。例如,作为彼此不同的多个部件或部分进行了说明的部件或部分也可以是一个部件或部分。例如,作为一个部件或部分进行了说明的部件或部分也可以分成彼此不同的多个部件或部分而设置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。