技术特征:
1.一种用于操作用于相对于主动元件(1)驱动被动元件(4)的驱动单元的方法,其中,所述主动元件(1)包括谐振器(2)和用于激励所述谐振器(2)中的振荡的至少一个激励装置(23),所述谐振器(2)包括从所述谐振器(2)的连接区域(20)延伸的至少一个臂(21、22),所述至少一个臂(21、22)包括在所述臂的外端的接触元件(31),所述接触元件(31)能够通过所述至少一个臂(21)的振荡运动而移动,所述被动元件(4)被布置成通过这些振荡运动相对于所述主动元件(1)被驱动和移动;所述被动元件(4)包括第一接触区域(41),所述第一接触区域(41)被布置成与第一接触元件(31)接触;所述主动元件(1)和所述被动元件(4)被布置成用于将至少所述第一接触元件(31)推向所述第一接触区域(41)的被称为预应力的力,特别是当所述主动元件(1)没有被激励时;所述方法包括以下步骤
·
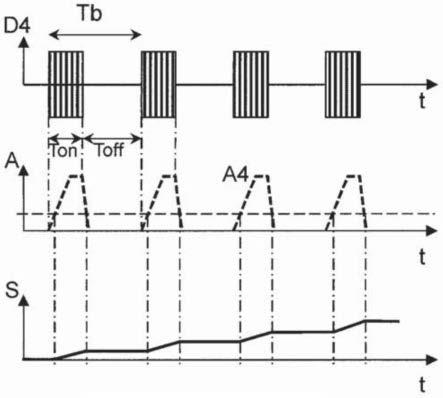
用驱动信号驱动所述激励装置(23),所述驱动信号是包括以激励频率重复的驱动脉冲的周期信号;
·
根据控制信号,通过以下方式修改所述驱动信号:ο如果所述控制信号在第一范围内,则修改所述激励频率或修改所述驱动脉冲的形状,同时保持所述激励频率相同,同时将每个驱动脉冲传输的能量保持在非零最小脉冲能量值之上,特别地其中,所述最小脉冲能量值是脉冲的最大能量的至少5%;以及ο如果所述控制信号在第二范围内,则重复地省略驱动脉冲。2.根据权利要求1所述的方法,其中,所述第一范围和所述第二范围重叠。3.根据前述权利要求中任一项所述的方法,其中,修改所述驱动脉冲的形状是通过以下至少之一来完成的
·
根据所述控制信号修改所述驱动脉冲的幅度;以及
·
根据所述控制信号修改所述驱动脉冲的宽度。4.根据前述权利要求中任一项所述的方法,其中,将每个驱动脉冲传输的能量保持在非零最小脉冲能量值之上是通过将所述驱动脉冲的脉冲占空比保持在最小脉冲占空比值之上并且通过将所述驱动脉冲的幅度保持在最小幅度值之上来实现的。5.根据权利要求4所述的方法,其中,所述最小脉冲能量值是脉冲的最大能量的至少5%或至少10%。6.根据前述权利要求中任一项所述的方法,其中,根据控制信号修改所述激励频率包括将所述激励频率修改的量不改变所述振荡模式而仅降低在这种振荡模式下的驱动单元的所述激励频率和固有频率之间的匹配。7.根据前述权利要求中任一项所述的方法,其中,重复地省略驱动脉冲包括根据所述控制信号修改省略驱动脉冲的关闭时间段的持续时间。8.根据前述权利要求中任一项所述的方法,其中,当重复地省略驱动脉冲时,在省略驱动脉冲的关闭时间段期间,所述预应力保持所述被动元件(4)相对于所述主动元件(1)的位置。9.根据前述权利要求中任一项所述的方法,其中,所述激励频率在50khz和1000khz之间的范围内,并且驱动脉冲的重复省略以所述激励频率的1/10到1/100的频率发生。
10.根据前述权利要求中任一项所述的方法,其中,所述控制信号对应于速度设定点,并且所述第一范围对应于较高的速度而所述第二范围对应于较低的速度。11.根据前述权利要求中任一项所述的方法,其中,所述控制信号对应于位置设定点,并且通过修改所述驱动脉冲的形状或所述激励频率来控制所述位置在一个脉冲周期内改变的位置步长。12.根据前述权利要求中任一项所述的方法,为了主动降低所述驱动单元的速度,包括以下步骤:
·
用具有第一激励频率的第一驱动信号驱动所述激励装置(23),所述第一驱动信号在第一方向上驱动所述驱动器;
·
通过用具有第二激励频率的第二驱动信号驱动所述激励装置(23)来降低所述速度,所述第二驱动信号在与所述第一方向相反的第二方向上驱动所述驱动器。13.根据权利要求12所述的方法,其中,降低所述驱动器的速度是通过在保持所述激励频率相同的同时降低所述驱动脉冲的占空比和/或幅度,或者通过在基本上保持其振荡模式的同时使所述激励频率与所述驱动单元的固有频率失谐来实现的。14.根据前述权利要求中任一项所述的方法,其中,降低所述驱动器的速度是通过省略驱动脉冲并且通过利用所述预应力制动所述驱动器来实现的。15.根据前述权利要求中任一项所述的方法,包括:为了通过在至少两个激励频率之间切换来控制所述驱动单元的运动,重复执行以下步骤
·
对于第一数量的脉冲,用具有第一激励频率的第一驱动信号驱动所述激励装置(23);
·
对于第二数量的脉冲,用具有第二激励频率的第二驱动信号驱动所述激励装置(23)。16.根据前述权利要求中任一项所述的方法,包括以下步骤:根据所述谐振器(2)的期望振荡模式,特别地根据所述被动元件(4)相对于所述主动元件(1)的相对运动的期望方向,通过以下步骤确定所述激励频率:
·
以不同的激励频率重复地驱动所述主动元件(1),并针对每个激励频率测量所述驱动单元的相关响应,特别地所述响应是所述被动元件(4)相对于所述主动元件(1)的移动速度或位移;
·
为所述驱动单元的未来操作选择优化所述响应、特别地最大化所述响应的最佳激励频率。17.根据权利要求16所述的方法,其中,对于被评估的不同激励频率中的每一个,将一定数量的驱动脉冲施加到所述主动元件,并且测量得到的线性或旋转或组合位移,以表示所述响应。18.根据权利要求16所述的方法,其中,对于被评估的不同激励频率中的每一个,将驱动脉冲施加到所述主动元件,并且测量达到的稳态速度,以表示所述响应。19.根据权利要求16至18中任一项所述的方法,其中,对于不同的操作模式,特别是对于引起相反的运动方向的操作模式,用于确定所述激励频率的步骤是单独执行的。20.根据权利要求16至19中任一项所述的方法,其中,对于对应于与所述驱动器在相反方向上的运动相对应的两种振荡模式的两个激励频率,确定所述两种振荡模式的最佳激励
频率以使得所述驱动单元的响应在两个方向上相同。21.根据权利要求16至20中任一项所述的方法,其中,对于一种或多种不同的操作模式中的每一种,用于确定所述激励频率的步骤在组装所述驱动单元之后执行一次,并且所述最佳激励频率被存储在所述驱动单元的控制器(90)中并用于所述驱动单元的后续操作。22.根据权利要求16至21中任一项所述的方法,其中,对于一种或多种不同的操作模式中的每一种,用于确定所述激励频率的步骤在所述驱动单元的寿命期间重复执行,并且每次所述最佳激励频率被存储在所述驱动单元的控制器(90)中并用于所述驱动单元的后续操作。23.根据前述权利要求中任一项所述的方法,包括以下步骤:利用施加到相对的激励装置(23)的激励信号的功率之间的不同关系来激励在所述谐振器(2)的相对两侧上的激励装置(23),从而根据所述关系在不同方向上相对于所述主动元件(1)驱动所述被动元件(4),这些不同方向在共同平面内并且彼此成角度,所述角度不同于0
°
和180
°
。24.根据前述权利要求中任一项所述的方法,包括以下步骤:利用相对于彼此相移的激励信号来激励在所述谐振器(2)的相对两侧上的激励装置(23),从而根据相移在不同方向上相对于所述主动元件(1)驱动所述被动元件(4),这些不同方向在共同平面内并且彼此成角度,所述角度不同于0
°
和180
°
。25.一种控制器(90),被配置为连接到驱动单元的激励装置(23)并为其供电,所述控制器被配置为执行根据前述权利要求中任一项所述的方法。26.一种用于相对于主动元件(1)驱动被动元件(4)的驱动单元,其中,所述主动元件(1)包括谐振器(2)和用于激励所述谐振器(2)中的振荡的至少一个激励装置(23),所述谐振器(2)包括从所述谐振器(2)的连接区域(20)延伸的至少一个臂(21、22),所述至少一个臂(21、22)包括在所述臂的外端的接触元件(31),所述接触元件(31)能够通过所述至少一个臂(21)的振荡运动而移动,所述被动元件(4)被布置成通过这些振荡运动相对于所述主动元件(1)被驱动和移动;所述被动元件(4)包括第一接触区域(41),所述第一接触区域(41)被布置成与第一接触元件(31)接触;所述主动元件(1)和所述被动元件(4)被布置成用于将至少所述第一接触元件(31)推向所述第一接触区域(41)的被称为预应力的力,特别是当所述主动元件(1)没有被激励时;所述驱动单元包括控制器(90),所述控制器(90)被配置为连接到所述驱动单元的所述激励装置(23)并为其供电,所述控制器(90)被配置为执行根据权利要求1至24中任一项所述的方法,所述驱动单元包括与压电激励装置(23)串联或与压电激励装置(23)并联的至少一个电感。
技术总结
一种用于操作驱动单元的方法,该驱动单元包括主动元件(1),该主动元件(1)具有谐振器(2)和用于激励谐振器(2)中的振荡并由此驱动被动元件(4)的激励装置(23)。该方法包括以下步骤:
技术研发人员:M
受保护的技术使用者:米尼斯怀斯股份公司
技术研发日:2020.12.10
技术公布日:2022/7/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。