1.本实用新型涉及马达,特别是一种能够精确地测出转子旋转时转子铁芯的变形量的马达。
背景技术:
2.现有技术中,存在测量各种旋转体在旋转时产生的变形量的技术手段。例如,在旋转体是涡轮机等中设置的在旋转轴周围固定有旋转翼的旋转体的情况下,从径向看时,旋转翼的前端部相对于根部为扭转状态,因而,在旋转轴旋转时,旋转翼的前端部受到离心力的影响而欲朝着根部方向返回,从而在旋转翼上会产生扭转变形。为了测量这种扭转变形的回扭量,大都将作为位移计的电磁拾取装置分别设置在旋转翼的前端部和根部附近。
3.基于上述结构,设置在产生扭转变形的前端部的电磁拾取装置中,电动势为与回扭变形量相应的电动势和与旋转翼的旋转速度相应的电动势相加后的合计值;而设置在未产生扭转变形的根部的电磁拾取装置中,电动势仅为与旋转翼的旋转速度相应的电动势。因此,通过从设置在前端部的电磁拾取装置的电动势中减去设置在根部的电磁拾取装置的电动势(即,两种电动势之间的差值),便能测出旋转翼的回扭量。该技术同样也适用于设置在马达中的转子。
4.然而,将上述技术应用于现有技术中的马达转子的情况下,存在无法精确地测出转子旋转时产生的变形量这样的问题。具体而言,由于转子的旋转轴可旋转地被轴承支撑着,所以旋转轴与轴承之间设有适当的间隙,以抑制摩擦和振动等。该间隙意味着,允许旋转轴相对轴承的中心线倾斜或在轴向上位移相应于所述间隙的量。这样,用来测量转子铁芯的变形量的电磁拾取装置会将因旋转轴的倾斜或轴向位移的影响而产生的变形量也作为转子铁芯的变形量来计测。因而,难以精确地测出转子铁芯本身的变形量。
技术实现要素:
5.针对上述情况,本实用新型的目的在于,提供一种能够排除旋转轴的倾斜或轴向位移的影响而精确地测出转子铁芯本身的变形量的马达。
6.作为解决上述技术问题的技术方案,本实用新型提供一种马达,该马达具备由轴承可旋转地支撑的旋转轴、和固定在所述旋转轴的周面上的转子铁芯,所述转子铁芯由磁性体构成,在所述转子铁芯的径向外侧配置有定子线圈,其特征在于:具有测量位于所述转子铁芯的径向外侧部分的评价部位的轴向位移的评价部位用位移计、测量位于所述转子铁芯的径向内侧部分的基准部位的轴向位移的基准部位用位移计、及根据所述评价部位用位移计的测量结果和所述基准部位用位移计的测量结果来计算所述评价部位在轴向上的变形量的变形量计算部,所述基准部位用位移计包括,分别测量在所述转子铁芯的径向内侧部分设定的三个不同的所述基准部位的轴向位移的第一位移计、第二位移计、及第三位移计,所述变形量计算部包括,根据所述第一位移计、所述第二位移计、及所述第三位移计各自的测量结果和所述评价部位用位移计的测量结果,来计算从三个不同的所述基准部位通
过的基准面与所述评价部位之间的距离的距离计算部;及计算所述旋转轴旋转时所述距离计算部算出的旋转时的距离与所述旋转轴停止旋转时所述距离计算部算出的停止时的距离之间的差值的差值计算部。
7.本实用新型的上述马达的优点在于,能够排除旋转轴的倾斜或轴向位移的影响而精确地测出转子铁芯本身的变形量。
8.另外,本实用新型的上述马达中,较佳为,还具备检测所述旋转轴的旋转角度的旋转角度检测器;及若所述旋转轴旋转时所述旋转角度检测器的检测结果与预先存储的实施测量值一致则使所述评价部位用位移计和所述基准部位用位移计实施测量的位移计控制部。
附图说明
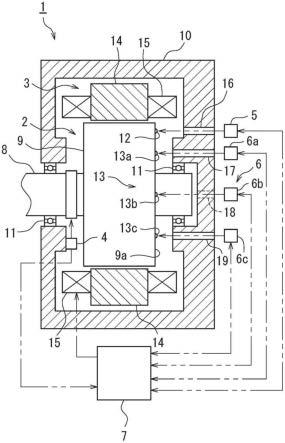
9.图1是表示本实用新型的实施方式的马达1的结构的概要截面图。
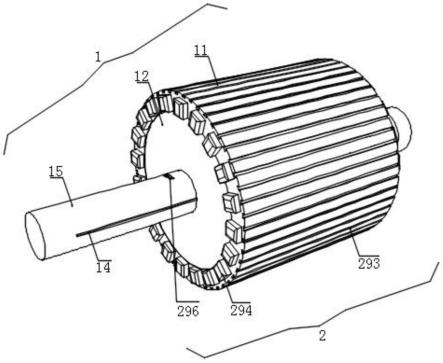
10.图2是从轴向上看到的图1中的转子2的概要俯视图。
11.图3是表示图1中的控制装置7的结构的方框图。
12.图4是用于说明马达1的作用及效果的示意图。
13.图5是表示控制装置7所进行的处理的流程图。
具体实施方式
14.以下,参照附图对本实用新型的实施方式进行说明。
15.<马达的结构>
16.图1是表示本实施方式的马达1的结构的概要截面图。如图1所示,马达1具备转子2、定子3、旋转角度检测器4、评价部位用位移计5、基准部位用位移计6、及控制装置7等。
17.转子2如图1所示那样,具有旋转轴8和转子铁芯9。旋转轴8 是圆棒形状的输出轴,由安装在马达外壳10上的轴承11支撑为可旋转的状态。转子铁芯9(未详细图示)是由电磁钢板构成的圆筒形状的构件,内置有未图示的永磁体。另外,转子铁芯9被固定在旋转轴8的周面上。
18.图2是从轴向上看到的转子2的概要俯视图。如图1和图2所示,在转子铁芯9上分别设定有评价部位12和基准部位13。
19.评价部位12是作为在轴向上的变形量的评价对象的部位。评价部位12被设定在转子铁芯9的端面9a的径向外侧部分的一个部位上。
20.基准部位13是作为对评价部位12进行评价时使用的比较对象的部位。基准部位13包括分别设定在转子铁芯9的端面9a的径向内侧部分的三个部位的第一基准部位13a、第二基准部位13b、及第三基准部位13c。
21.在图1和图2中,为方便起见,对评价部位12和各基准部位1 3进行了夸张的图示。
22.定子3产生使转子2旋转的电磁力。如图1所示,定子3具有定子铁芯14和定子线圈15。定子铁芯14是由电磁钢板等构成的圆筒形状的构件,该定子铁芯14与转子铁芯9隔开间隙地包围着转子铁芯9。定子线圈15卷绕在定子铁芯14上,被配置在转子铁芯9 的周向的三个部位(未详细图示)。基于该结构,在控制装置7的控制下,定子线圈15中流过三相交流电流时,在定子铁芯14的中心部产生旋转磁场,从而使转子铁芯9和固定在其上的旋转轴8一
体地旋转。
23.旋转角度检测器4用于检测旋转轴8相对于原点位置(未图示) 的旋转角度。作为旋转角度检测器4,可以采用以光电方式或磁性方式等检测旋转角度的公知的旋转编码器等。如图1所示,旋转角度检测器4的检测结果被输入到控制装置7。
24.评价部位用位移计5用于检测转子铁芯9的评价部位12在轴向上的位移。作为评价部位用位移计5,可以采用以激光方式或电容方式等非接触性地检测到对象物为止的距离的公知的位移传感器。如图 1所示,评价部位用位移计5被设置在马达外壳10的外部的、能够穿过将马达外壳10穿透而形成的外侧测量窗口16而检测到转子铁芯9的评价部位12的位置上。评价部位用位移计5在控制装置7的控制下动作,其测量结果被输入到控制装置7。
25.基准部位用位移计6用于检测转子铁芯9的基准部位13在轴向上的位移。作为基准部位用位移计6,可以采用以激光方式或电容方式等非接触性地测量到对象物为止的距离的公知的位移传感器。如图 1所示,基准部位用位移计6设置在马达外壳10的外部,包括第一位移计6a、第二位移计6b、及第三位移计6c。第一位移计6a 穿过将马达外壳10穿透而形成的第一内侧测量窗口17,测量第一基准部位13a在轴向上的位移。第二位移计6b穿过将马达外壳1 0穿透而形成的第二内侧测量窗口18,测量第二基准部位13b在轴向上的位移。第三位移计6c穿过将马达外壳10穿透而形成的第三内侧测量窗口19,测量第三基准部位13c在轴向上的位移。这些第一位移计6a、第二位移计6b、及第三位移计6c分别在控制装置7的控制下动作,并且,各自的测量结果被输入到控制装置7。另外,基准部位用位移计6的设置位置也可以变更为马达外壳10的内部。
26.控制装置7用于对各构件进行控制。图3是表示控制装置7的结构的方框图。如图3所示,控制装置7具有变形量计算部20、储存部21、及位移计控制部22。
27.变形量计算部20根据评价部位用位移计5的测量结果和基准部位用位移计6的测量结果,计算评价部位12在轴向上的变形量。变形量计算部20具有距离计算部23和差值计算部24。距离计算部 23根据第一位移计6a、第二位移计6b、第三位移计6c的测量结果、及评价部位用位移计5的测量结果,求解从第一基准部位13 a、第二基准部位13b、及第三基准部位13c通过的基准面的方程式,然后计算该基准面与评价部位12之间的距离。本实施方式中,基准面与评价部位12之间的距离相当于从评价部位12朝着基准面画垂线后该垂线的长度。
28.储存部21用于储存各种数据和程序。本实施方式中,该储存部 21中储存着应使评价部位用位移计5及基准部位用位移计6进行测量的旋转轴8的旋转角度,即,“实施测量值”。
29.位移计控制部22根据旋转角度检测器4的检测结果来控制评价部位用位移计5及基准部位用位移计6的动作。
30.<作用效果>
31.下面,对本实用新型的实施方式的马达1的作用及效果进行说明。图4是用于说明马达1的作用和效果的示意图,图5是表示控制装置 7所进行的控制处理(对转子铁芯9的评价部位12及基准部位13 进行测量的处理)的流程图。
32.如图5所示,测量处理开始后,在步骤s1中,控制装置7通过使定子线圈15通电而使旋转轴8适宜地旋转,由此,使转子铁芯9 的评价部位12移动到规定的测量位置,即,评价部
位用位移计5能够穿过外侧测量窗口16测量到该评价部位12的位置。
33.在步骤s2中,控制装置7在使评价部位12停止在所述测量位置的旋转停止状态下,获取旋转角度检测器4的检测结果。
34.在步骤s3中,所述检测结果作为实施测量值被存储到储存部2 1中(参照图3)。
35.在步骤s4中,控制装置7所具备的位移计控制部22(参照图 3)在使转子2停止旋转的状态下,使评价部位用位移计5和基准部位用位移计6分别进行测量。详细而言,位移计控制部22使评价部位用位移计5测量评价部位12的轴向位移,并获取其测量结果。另一方面,位移计控制部22使第一位移计6a测量第一基准部位13 a的轴向位移、使第二位移计6b测量第二基准部位13b的轴向位移、使第三位移计6c测量第三基准部位13c的轴向位移,然后获取它们的测量结果。
36.在步骤s5中,控制装置7所具备的距离计算部23(参照图3) 计算转子2停止旋转时基准面与评价部位12之间的停止时的距离。详细而言,首先,距离计算部23根据在转子2停止旋转的状态下获取的第一位移计6a、第二位移计6b、及第三位移计6c的各自的测量结果,求解从第一基准部位13a、第二基准部位13b、及第三基准部位13c这三点通过的停止时的基准面的方程式。然后,距离计算部23同样根据在转子2停止旋转的状态下获取的评价部位用位移计5的测量结果,计算停止时的基准面与评价部位12之间的距离,即,停止时的距离。
37.在步骤s6中,控制装置7通过使定子线圈15通电而使转子2 开始旋转。
38.在步骤s7中,控制装置7所具备的位移计控制部22在使转子 2旋转的状态下,使评价部位用位移计5及基准部位用位移计6分别进行测量。详细而言,若旋转角度检测器4的检测结果与储存部21 中存储的实施测量值不一致(步骤s7中的否),则位移计控制部2 2处于等待状态;若旋转角度检测器4的检测结果与所述实施测量值一致(步骤s7中的是),则使评价部位用位移计5及基准部位用位移计6分别实施测量(步骤s8)。
39.步骤s8与前述的步骤s4相同,因而在此省略其详细说明。
40.在步骤s9中,控制装置7所具备的距离计算部23计算转子2 旋转时的基准面与评价部位12之间的旋转时的距离。详细而言,首先,距离计算部23根据在使转子2旋转的状态下获取的第一位移计 6a、第二位移计6b、及第三位移计6c的各自的测量结果,求解从第一基准部位13a、第二基准部位13b、及第三基准部位13 c这三点通过的旋转时的基准面的方程式。然后,距离计算部23同样根据在使转子2旋转的状态下获取的评价部位用位移计5的测量结果,计算旋转时的基准面与评价部位12之间的距离,即,旋转时的距离。
41.最后,在步骤s10中,控制装置7所具备的差值计算部24(参照图3)计算转子2旋转时的评价部位12在轴向上的变形量。详细而言,差值计算部24通过计算在步骤s9中算出的旋转时的距离与在步骤s5中算出的停止时的距离之间的差值,而算出转子2旋转时评价部位12在轴向上的变形量。然后,结束测量处理。
42.基于上述测量处理,能够排除旋转轴8的倾斜和轴向位移的影响,精确地算出转子铁芯9本身在轴向上的变形量。通常,如上所述那样,由于在旋转轴8与轴承11之间设有间隙,所以意味着允许旋转轴8 相对轴承11的中心线倾斜或在轴向上的位移相应于所述间隙的量。然而,在旋转轴8产生这种倾斜等的情况下,在转子铁芯9的径向外侧部分设定的评价部位12会在轴向上产生较大的位移,而在转子铁芯9的径向内侧部分设定的三个基准部位13则基本上不会在轴向上产生位移。因此,如图4所示那样,在步骤s5中算出的停止时的距
离d1表示因旋转轴8的倾斜等而在转子铁芯9的径向外侧产生的轴向位移。另外,图4中,虚线示出轴承11的中心线,实线示出产生了倾斜的旋转轴8。
43.另一方面,当转子2旋转时,定子线圈15中的三相交流电流形成磁场,在该磁场的作用下,由电磁钢板构成的转子铁芯9会在轴向上变形。有关该变形,在转子铁芯9的径向外侧部分设定的评价部位 12的周边会产生较大的变形,而在转子铁芯9的径向内侧部分设定的三个基准部位13的周边则基本上不产生变形。因而,如图4所示,在步骤s9中算出的旋转时的距离d2为,因旋转轴8的倾斜等而在径向外侧部分产生的轴向位移与因磁场的作用而在转子铁芯9的径向外侧部分产生的轴向变形量相加后的合计值。
44.因而,如图4所示,在步骤s10中算出的旋转时的距离d2与停止时的距离d1之间的差值相当于在转子2旋转时因磁场的作用而在转子铁芯9的径向外侧部分产生的轴向变形量d3,即,转子铁芯 9本身的轴向变形量。由此,能够排除旋转轴8的倾斜等影响,精确地测量和评价在转子2旋转时仅因磁场的作用而引起的转子铁芯9本身的轴向变形量d3。
45.<变形例>
46.本实用新型的技术范围不为上述实施方式中记载的内容所限定,在权利要求书所界定的范围内,可进行各种变更。例如,对上述实施方式可以实施以下变形。
47.上述实施方式中,评价部位12及三个基准部位13分别被设定在图2所示的部位上,但是,评价部位12可以被设定在转子铁芯9 的径向外侧部分的任何部位上,三个基准部位13也可以分别被设定在转子铁芯9的径向内侧部分的任何部位上。
48.上述实施方式中,基准部位13被设定在转子铁芯9的三个部位上。但是,在能够求出一个基准面的范围内,也可以在转子铁芯9的四个部位以上设定基准部位13。在此情况下,可以相应于基准部位13的个数而适当地变更基准部位用位移计6的个数。
49.上述实施方式中,控制装置7根据由旋转角度检测器4检测出的旋转轴8的旋转角度,来使评价部位用位移计5和基准部位用位移计 6实施测量。但是,取代之,控制装置7也可以根据例如用计时器计测到的从旋转开始起所经过的经过时间,来使评价部位用位移计5和基准部位用位移计6实施测量。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。