1.本发明涉及无电解电容永磁同步电机驱动系统母线电压控制方法,属于电机控制技术领域。
背景技术:
2.三相输入电解电容永磁同步电机通过大容量电解电容实现母线电压平滑和稳定,而电解电容的寿命短,限制了驱动系统寿命。电机系统对薄膜电容的应用除了可延长驱动系统的寿命之外,还能够在电网电流中实现较低的总谐波失真(thd)。然而,薄膜电容的使用造成母线电容容值的降低,这使得无电解电容驱动系统的再生制动过程面临着母线电压过压等问题。
3.目前,无电解电容驱动系统针对母线电压过压的情况分别存在硬件和软件控制解决方案。其硬件方案是在母线侧并联一个由开关设备控制的辅助制动电阻,这种额外增加硬件的方式不仅要增加驱动系统的容量,还会增加系统的成本。软件控制方案是在再生制动模式中,通过控制给定电流降低电机降速速率和增加电机损耗,其中包括由电压控制器控制q轴电流以降低电机降速速率,由损耗控制器控制d轴电流以最大限度地增加电机损失。然而,控制器的最优控制参数在不同工况下取值不同,控制参数取值不当会导致系统动态性能差。
4.现有无电解电容永磁同步电机驱动系统中,当母线侧薄膜电容替换大容值电解电容后,在电机再生制动过程中降速、降载时,由于不能及时有效的调整控制器的控制参数,极易发生母线侧电压过压的问题。
技术实现要素:
5.针对现有无电解电容永磁同步电机驱动系统在再生制动过程中降速时,由于不能在线调整控制器的控制参数,导致母线侧电压过压的问题,本发明提供一种无电解电容永磁同步电机驱动系统母线电压控制方法。
6.本发明的一种无电解电容永磁同步电机驱动系统母线电压控制方法,包括,
7.设置电压调节器对母线电压u
dc
与母线电压限制值u
dc
‑
max
的母线电压差值进行调整,从而实现对给定q轴电流的调整,以降低电机降速速率;
8.所述电压调节器通过实时调整的比例系数k
p
实现对所述母线电压差值的调整,所述比例系数k
p
的获得方法包括:
9.根据当前给定q轴电流和采集获得的当前实际q轴电流i
q
计算获得标准q轴电流
10.将标准q轴电流减去给定q轴电流的差值的绝对值乘以步长n得到比例系数变化量δk
p
的绝对值,根据标准q轴电流的正负确定比例系数变化量δk
p
的正负,将比
例系数变化量δk
p
经积分模块积分后与比例系数初值k
p0
相加,获得比例系数k
p
。
11.根据本发明的无电解电容永磁同步电机驱动系统母线电压控制方法,获得给定q轴电流的过程包括获得电压环输出的q轴电流给定值
12.所述电压调节器为电压pi调节器,电压调节器对所述母线电压差值的调整结果经电压环电流限幅单元限流后得到给定限流后电流值通过补偿单元采用给定限流后电流值对当前实际q轴电流i
q
进行补偿,获得电压环输出的q轴电流给定值
13.根据本发明的无电解电容永磁同步电机驱动系统母线电压控制方法,获得给定q轴电流的过程还包括获得转速环输出的给定q轴电流
14.将给定转速减去观测转速的差值经转速调节器调节后,再经转速环电流限幅单元限流后,得到转速环输出的给定q轴电流
15.根据本发明的无电解电容永磁同步电机驱动系统母线电压控制方法,由转速环输出的给定q轴电流和电压环输出的q轴电流给定值相加得到给定q轴电流
16.根据本发明的无电解电容永磁同步电机驱动系统母线电压控制方法,所述观测转速由转速位置观测器根据两相静止坐标系上的给定α轴电压u
α*
、两相静止坐标系上的给定β轴电压u
β*
、两相静止坐标系上的α轴电流i
α
和两相静止坐标系上的β轴电流i
β
计算获得。
17.根据本发明的无电解电容永磁同步电机驱动系统母线电压控制方法,标准q轴电流的计算方法包括:
[0018][0019]
其中n
p
为转子极对数,ψ
f
为转子磁链,ω
m0
为转速稳态值,k
i
为电压调节器的积分系数,u
dc0
为母线电压稳态值,c
dc
为母线电容容值。
[0020]
根据本发明的无电解电容永磁同步电机驱动系统母线电压控制方法,所述实际q轴电流i
q
的获得过程包括:
[0021]
对三相逆变器输出的a相电流i
a
、b相电流i
b
和c相电流i
c
依次进行clark变换和park变换,获得实际q轴电流i
q
。
[0022]
根据本发明的无电解电容永磁同步电机驱动系统母线电压控制方法,所述补偿单元采用给定限流后电流值对当前实际q轴电流i
q
进行补偿的方法包括:
[0023]
当实际q轴电流i
q
大于0时,给定限流后电流值对当前实际q轴电流iq进行补偿,使输出的q轴电流给定值为0;
[0024]
当实际q轴电流i
q
小于或等于0时,给定限流后电流值对当前实际q轴电流iq进行补偿,使输出的q轴电流给定值等于给定限流后电流值
[0025]
根据本发明的无电解电容永磁同步电机驱动系统母线电压控制方法,观测转速的取值范围为0.2
‑
0.9倍额定转速。
[0026]
根据本发明的无电解电容永磁同步电机驱动系统母线电压控制方法,电压调节器对所述母线电压差值的调整过程包括:将实时调整的比例系数k
p
赋值给电压调节器的pi参数,再采用更新后的电压调节器对所述母线电压差值形成闭环控制。
[0027]
本发明的有益效果:
[0028]
本发明通过实时改变的比例系数变化量δk
p
来调整比例系数k
p
为最优值,可以有效实现防过压的目的和提高驱动系统动态性能,确保电机性能最优。有效避免硬件方案中并联辅助制动电阻带来的驱动系统成本高和功率密度降低的问题。
[0029]
本发明方法实现了在驱动系统再生制动运行中实时计算控制器最优参数,从而实现母线侧防过压的目的和较高的驱动系统动态性能。
附图说明
[0030]
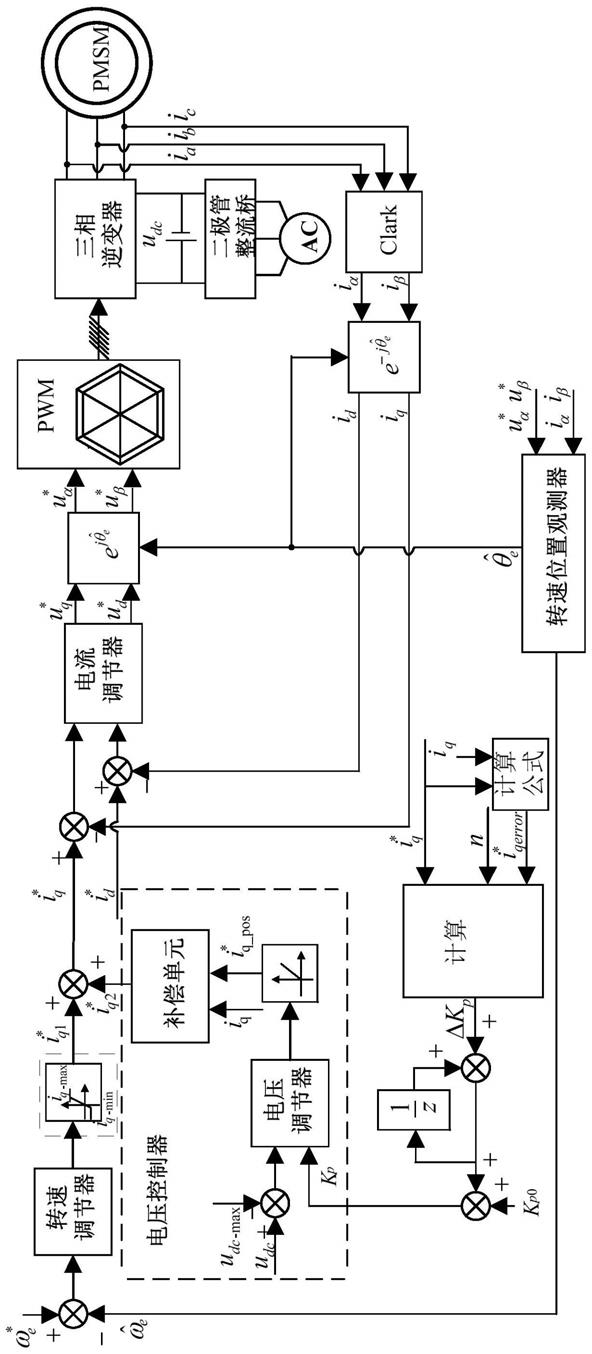
图1是本发明所述无电解电容永磁同步电机驱动系统母线电压控制方法的控制系统整体框图;图中i
q
‑
min
为转速调节器输出电流的最小值,i
q
‑
max
为转速调节器输出电流的最大值,为两相旋转坐标上的给定q轴电流,i
d
为两相旋转坐标上的实际d轴电流,i
q
为两相旋转坐标上的实际q轴电流,为观测角度,ac为交流源;
[0031]
图2是具体实施例中电机转速从75hz降至0hz且不加负载时的各变量波形图;图中n为转速;
[0032]
图3是具体实施例中电机转速从5hz突升到75hz过程中突卸30n
·
m负载时的各变量波形图。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0034]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0035]
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
[0036]
具体实施方式一、结合图1所示,本发明提供了一种无电解电容永磁同步电机驱动系统母线电压控制方法,包括,
[0037]
设置电压调节器对母线电压u
dc
与母线电压限制值u
dc
‑
max
的母线电压差值进行调整,从而实现对给定q轴电流的调整,以降低电机降速速率;
[0038]
所述电压调节器通过实时调整的比例系数k
p
实现对所述母线电压差值的调整,所述比例系数k
p
的获得方法包括:
[0039]
根据当前给定q轴电流和采集获得的当前实际q轴电流i
q
计算获得标准q轴电流
[0040]
将标准q轴电流减去给定q轴电流的差值的绝对值乘以步长n得到比例系数
变化量δk
p
的绝对值,根据标准q轴电流的正负确定比例系数变化量δk
p
的正负,将比例系数变化量δk
p
经积分模块积分后与比例系数初值k
p0
相加,获得比例系数k
p
。
[0041]
本实施方式中,标准q轴电流减去给定q轴电流的差值的绝对值乘以步长n得到比例系数变化量δk
p
的绝对值|δk
p
|,根据标准q轴电流的正负确定δk
p
的正负,实时计算得到比例系数变化量δk
p
。
[0042]
所述母线电压u
dc
为图1中二极管整流桥的输出电压。
[0043]
本实施方式通过实时改变的比例系数变化量δk
p
可调整比例系数k
p
为最优值,从而可确何电机性能最优。
[0044]
进一步,结合图1所示,获得给定q轴电流的过程包括获得电压环输出的q轴电流给定值
[0045]
所述电压调节器为电压pi调节器,电压调节器对所述母线电压差值的调整结果经电压环电流限幅单元限流后得到给定限流后电流值通过补偿单元采用给定限流后电流值对当前实际q轴电流i
q
进行补偿,获得电压环输出的q轴电流给定值
[0046]
当前实际q轴电流i
q
和给定限流后电流值共同输入至补偿单元后,获得电压环输出的q轴电流给定值
[0047]
再进一步,结合图1所示,获得给定q轴电流的过程还包括获得转速环输出的给定q轴电流
[0048]
将给定转速减去观测转速的差值经转速调节器调节后,再经转速环电流限幅单元限流后,得到转速环输出的给定q轴电流
[0049]
是一个不小于0的部分q轴电流给定,配合母线电压超过母线电压限制值u
dc
‑
max
时小于0的可以降低电机降速速率,有效实现防过压的目的和提高驱动系统动态性能。
[0050]
再进一步,结合图1所示,由转速环输出的给定q轴电流和电压环输出的q轴电流给定值相加得到给定q轴电流获得的给定q轴电流可实现防过压控制。
[0051]
再进一步,结合图1所示,所述观测转速由转速位置观测器根据两相静止坐标系上的给定α轴电压u
α*
、两相静止坐标系上的给定β轴电压u
β*
、两相静止坐标系上的α轴电流i
α
和两相静止坐标系上的β轴电流i
β
计算获得。
[0052]
再进一步,结合图1所示,标准q轴电流的计算方法包括:
[0053][0054]
其中n
p
为转子极对数,ψ
f
为转子磁链,ω
m0
为转速稳态值,k
i
为电压调节器的积分系数,u
dc0
为母线电压稳态值,c
dc
为母线电容容值。
[0055]
再进一步,结合图1所示,所述实际q轴电流i
q
的获得过程包括:
[0056]
对三相逆变器输出的a相电流i
a
、b相电流i
b
和c相电流i
c
依次进行clark变换和park变换,获得实际q轴电流i
q
。
[0057]
再进一步,结合图1所示,所述补偿单元采用给定限流后电流值对当前实际q轴电流i
q
进行补偿的方法包括:
[0058]
当实际q轴电流i
q
大于0时,给定限流后电流值对当前实际q轴电流iq进行补偿,使输出的q轴电流给定值为0;
[0059]
当实际q轴电流i
q
小于或等于0时,给定限流后电流值对当前实际q轴电流iq进行补偿,使输出的q轴电流给定值等于给定限流后电流值
[0060]
再进一步,结合图1所示,观测转速的取值范围为0.2
‑
0.9倍额定转速。
[0061]
再进一步,电压调节器通过实时调整的比例系数k
p
对所述母线电压差值的调整过程包括:将实时调整的比例系数k
p
赋值给电压调节器的pi参数,再采用更新后的电压调节器对所述母线电压差值形成闭环控制。
[0062]
本发明方法中,给定q轴电流与实际q轴电流i
q
作差的差值输入至电流调节器,给定d轴电流与实际d轴电流i
d
的差值输入至电流调节器,经运算获得两相旋转坐标上的给定d轴电压和两相旋转坐标上的给定q轴电压再经park反变换获得两相静止坐标系上的给定α轴电压u
α*
和两相静止坐标系上的给定β轴电压u
β*
;u
α*
和u
β*
经pwm调制后作为三相逆变器的控制信号。
[0063]
图1中包括无位置传感器矢量控制部分、k
p
参数给定部分和电压控制器部分;所述电压控制器部分如图1中虚线框所示,包括电压调节器、电压环电流限幅单元和补偿单元;所述无位置传感器矢量控制部分,内环为电流环,外环为速度环,转速的参考值与反馈值之差通过速度调节器进行调节,直轴电流的参考值与反馈值之差值通过电流调节器进行调节,交轴电流的参考值与反馈值之差值通过电流调节器进行调节。电机的角度和位置由位置、速度观测器获得。电机定子三相电流通过clark和park坐标变换得到两相旋转坐标系下的d、q轴电流。采用svpwm控制三相逆变器,最终实现永磁同步电机控制。
[0064]
具体实施例:
[0065]
对本发明方法进行有效性验证如下:
[0066]
在无电解电容永磁同步电机驱动系统平台上验证本发明提出的防过压控制方法的有效性。实验平台的各项参数设置为:电网电压380v,电网频率50hz,直流母线电容为薄膜电容,容值为30μf,直轴电感7.5mh,交轴电感17.2mh,转子磁链0.5wb,转子极对数为3,额定功率为11kw,额定转速为1500r/min,定子电阻为0.275ω。
[0067]
实验中所有的控制算法都是在dsp stm32f28075中完成的。开关和电流电压采样值更新频率均设为8khz。母线电压限制值u
dc
‑
max
设定为618v。
[0068]
通过图2表明,当电机转速指令从75hz突降到0hz且不加负载时,直流侧母线电压被控制在618v左右。
[0069]
通过图3表明,当电机转速指令从5hz突升到75hz过程中突卸30n
·
m负载时,直流
侧母线电压被控制在618v左右。
[0070]
由此证明,本发明方法在电机再生制动过程中,母线电压能够被有效控制,且保证了电机动态性能。
[0071]
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其它所述实施例中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。