通用地面失重系统
1.相关申请的引证
2.本技术要求享有2019年8月30日提交的美国临时申请号62/894,667的优先权,该申请通过引用以全部内容结合于本文中。
技术领域
3.本发明涉及在与非旋转流体介质接触并包含受重力影响或响应重力的材料系统的限界区域或体积内在周围环境中在存在非零、有限重力下产生或以其他方式诱导可变和失重条件的方法和设备。
背景技术:
4.人们越来越感兴趣和需要开发能够创造失重条件(《1g)的系统,尤其是地面系统(ground-based system)。开发此类系统的兴趣源于全球对人类太空探索的追求,专门研究和开发地面系统才能在失重环境下更深入地了解非生物材料以及生物材料和系统(非生物和生物)的需要,生产用于地基(earth-based)应用和失重下的极端空间环境的高性能材料、设备和系统的先进制造系统的需要,以及能够规模放大并通常适用于在失重环境中评价、合成、加工或生产各种材料系统的更便宜和更易于使用的实用地面系统的需要等。
5.迄今为止,只有有限数量的工程设计方法和设备能够创造能够降低重力对非生物材料系统的影响的情况,如聚合物、陶瓷、金属及其复合材料,以及非生命和有生命生物材料系统以及由非生物和生物材料组成的混杂材料系统而同时处于重力场影响之下的环境中。这些包括为在地面上地球环境中运行而开发的方法和设备,以及为在地面,即存在单位重力(1-g或9.81m2/s)的行星表面或地球表面上运行而开发的方法和设备。地上失重系统的实例包括落塔和管道、气球、经历抛物线飞行模式的飞行器、探空火箭(sounding rocket)、卫星和低轨道空间站,如国际空间站(iss)等。地面失重系统(ground-based reduced gravity system)的实例包括悬浮系统(声学、磁力、电磁、静电、降落管)、脉冲emag系统、组合电磁(emag)/浮力系统、随机定位系统、离心系统、悬挂系统(动物)、竖直(headup)/倾斜系统、水浸系统和流体旋转系统等。
6.现有的失重系统包括:在重力环境中支撑测试物品以在模拟失重条件下测试测试制品的电缆系统;由人在微重力环境中操作的制造装置;一种包括通过为乘客提供重力或失重体验的加压气体发射乘用车的中空发射管的装置和方法;一种产生磁场以使加热和熔化的物质悬浮(levitate)并随后冷却而更精确控制材料形状的设备和方法;一种用于悬浮和浓缩气溶胶和其他小型液体/固体样品的低功率声学方法和设备;一种产生能够模拟局部区域如小容器中的低重力或超重力环境以影响材料合成的磁场的装置和方法;一种悬挂于飞行器上而执行抛物线飞行路径(其具有模拟失重环境的自动校正重心)的试验腔室;一种包括允许在失重环境中行走,用于训练、教育、娱乐和休闲目的的静态平衡的可调节弹簧设备的装置和方法;一种包括带有连接到经历模拟失重环境影响的负载的电缆的水平可移动托架(carriage)的可变重力场模拟器设备和方法;一种包括构造设计成自由落体下降期
间控制乘客的交互式塔架轨道和乘坐车辆的装置和方法。
7.关于材料合成与加工,现有系统包括:产生由允许在失重条件下动态控制晶体生长的高磁场引起的抗磁(diamagnetic)条件的设备和方法;一种结合自由电泳和多级萃取而改进细胞、颗粒、蛋白质和溶质的分离和纯化的装置和方法;一种包括在允许颗粒熔体在自由落体时凝固的静电悬浮炉中的落管型结晶体生产设备的装置和方法;一种包括在失重条件下产生熔体凝固的静电悬浮炉的装置和方法;一种在太空中利用增材制造工艺制造铸造金属物体的装置和方法。
8.关于细胞和组织生物反应器,现有系统包括通过利用旋转壁容器生物反应器诱导模拟微重力条件以生长活细胞和组织的装置和方法。相关系统,称为经典回转器(clinostat),由julius sachs于1879年首次引入,使用类似的旋转系统,但用于幼苗和小植物以评价它们的重力响应。然而,这些系统都没有模拟微重力的关键特征,即消除测试物品周围液体和气体的对流混合。
9.因此,对于一种包括限界区域或体积,如经受环境重力场的腔室或容器,包含受重力影响的材料系统,浸在非旋转的动态流体介质中使自由落体条件保持长时间的通用地面失重技术平台,仍存需要。本发明满足了这种需要。
技术实现要素:
10.一方面,本发明涉及一种失重系统,包括:至少一个导管,其具有至少一个与入口和出口连通的腔;入口,其定位于低于所述出口高度的高度处;通过流体导流器可流动穿过所述至少一个导管的流体介质;和限界腔室,其尺寸设计成在所述至少一个导管的所述至少一个腔内自由移动。
11.在一个实施方式中,所述至少一个导管以相对于垂直于重力的平面的一定角度对齐,该角度为约1
°‑
179
°
。在一个实施方式中,所述至少一个导管的尺寸设计成容纳入口和出口之间的限界腔室。在一个实施方式中,所述至少一个导管的轴向长度尺度大于限界腔室的轴向长度。在一个实施方式中,所述至少一个导管的长度为约1cm-100m。在一个实施方式中,所述至少一个导管具有一定宽度或一定半径而使所述至少一个导管包括尺寸设计成容纳入口和出口之间的限界腔室的轴向长度与宽度或半径之间的一定纵横比。在一个实施方式中,所述至少一个导管具有约1cm-10m的宽度。在一个实施方式中,该纵横比为约1:1-100:1。
12.在一个实施方式中,该流体介质选自水、油、凝胶、空气、氮气、惰性气体、单相流体、多相流体及其组合。在一个实施方式中,该流体介质针对粘度、密度、化学性质(ph和极性)和流变(flow deformation)行为(牛顿或非牛顿)进行选择。
13.在一个实施方式中,该系统还包括一种或多种能量源、流体储存器、传感器、致动器和控制器。在一个实施方式中,所述一个或多个传感器选自由以下组成的组中:光学传感器、定位装置、加速度计、陀螺仪、超声传感器和电容式位移传感器。在一个实施方式中,所述一个或多个致动器选自手动、气动、液压和电动致动器。在一个实施方式中,该系统还包括一个或多个能量发射器,其选自由以下组成的组中:激光器,高和低辐射能发射器,光发射器,红外发射器,紫外发射器,超声换能器,声波发射器,辐射发射器,磁场发射器,无线电波发射器,x射线发射器和电极。
14.在一个实施方式中,该限界腔室包括围绕中空内部的外壳。在一个实施方式中,该限界腔室具有选自由以下组成的组中的几何形状:球体、圆盘、圆柱体、立方体、圆锥体、矩形棱柱体和盒状。在一个实施方式中,该中空内部包括单一内部或分隔成多隔间内部。在一个实施方式中,该中空内部通过阻隔元件分隔成两个隔室,该阻隔元件包括尺寸设计成密封性配合中空内部中的环、尺寸设计成密封性配合所述环的中心孔道内的中空核芯和尺寸设计成密封性配合所述核芯的中空部内的塞子。在一个实施方式中,该塞子是能够打开以解闭(unblock)核芯的中空部并流体连通两个隔室的闸门或阀门。在一个实施方式中,该塞子包括一种随着时间会熔化或破裂开而解闭核芯的中空部并流体连通两个隔室的可溶解或可降解材料。在一个实施方式中,该限界腔室的外壳的区域包括半透膜。在一个实施方式中,该限界腔室的外壳包括一定体积的与能够流过所述至少一个导管的流体介质不混溶的流体。在一个实施方式中,该限界腔室具有的横截面面积为所述至少一个腔的横截面面积的50%、60%、70%、80%、90%、95%或99%。在一个实施方式中,所述至少一个导管和限界腔室至少部分透明或半透明。
15.在一个实施方式中,该系统还包括一种或多种能量发射器,其选自由以下组成的组中:激光器、高和低辐射能发射器、光发射器、红外发射器、紫外发射器、超声换能器、声波发射器、辐射发射器、磁场发射器、无线电波发射器、x射线发射器和电极。
16.在一个方面中,本发明涉及一种在模拟失重下悬浮腔室的方法,其包括以下步骤:提供失重系统,该失重系统包括至少一个具有至少一个在入口和出口之间延伸的腔的导管,该入口定位于低于出口高度的高度处,以及尺寸设计成配合所述至少一个腔内的限界腔室;将导管以一个相对于垂直于重力的平面的一定角度对齐,该角度为约1
°‑
179
°
;和使流体流入所述至少一个导管的入口并流出所述至少一个导管的出口,其中所述流体具有小于所述限界腔室密度的密度,并且其中所述流体以支撑限界腔室而使得所述限界腔室在导管内保持于恒定位置的流速流动。
17.在一个实施方式中,改变所述至少一个导管的角度以改变所述限界腔室所经受的重力量。在一个实施方式中,流体要针对小于所述限界腔室密度的密度进行选择。
18.在一个方面中,本发明涉及一种限界腔室装置,其包括:围绕中空内部的外壳;其中所述限界腔室装置构造设计成模拟行星表面附近的中空内部中的重力环境。
19.在一个实施方式中,该重力环境为约单位重力至零重力。在一个实施方式中,该中空内部被分隔成单独隔室。在一个实施方式中,该中空内部通过阻隔元件分隔成两个隔室,该阻隔元件包括尺寸设计成密封性配合中空内部中的环、尺寸设计成密封性配合所述环的中心孔道内的中空核芯和尺寸设计成密封性配合该核芯的中空部中的塞子。在一个实施方式中,该塞子是可打开以解闭(unblock)核芯的中空部并流体连通两个隔室的闸门或阀门。在一个实施方式中,该塞子包括一种随着时间推移会熔化或破裂开以解闭核芯的中空部并流体连通两个隔室的可溶解或可降解材料。在一个实施方式中,该限界腔室的外壳的区域包括半透膜。
20.在一个实施方式中,该设备构造设计成支持选自由以下组成的组中的工艺过程:材料合成与加工;从头材料合成与加工;材料结构、性能、加工和行为研究;工业结晶;薄膜沉积与加工;生物和生物材料合成与加工、蛋白质结晶;药物合成与加工;细胞、组织和器官的生长和再生;金属加工;玻璃合成与加工;合金合成与制造;制备;陶瓷合成与加工;聚合
物合成与加工;半导体合成;材料组装与自组装;光纤制造、复合材料合成与加工;元件、装置、系统性能评价;增材制造;和生物制造。
21.在一个实施方式中,该装置的尺寸设计成适合动物和人类居住。在一个实施方式中,该装置构造设计成休闲性模拟失重。在一个实施方式中,该装置构造设计成模拟低轨道太空船(low orbit space vessel)中失重条件。
附图说明
22.当结合附图阅读时,将更好地理解以下对本发明示例性实施方式的详细描述。然而,应当理解的是,本发明不限于附图中所示实施方式的精确布置和工具化(instrumentality)。
23.图1描绘了示例性失重管道系统。
24.图2描绘了示例性限界腔室。
25.图3描绘了示例性限界腔室阻隔元件(左)和带有塞子(右)的立体图。
26.图4是描绘在模拟失重下悬浮腔室的示例性方法的流程图。
27.图5描绘了示例性反应腔室的示意图。
28.图6描绘了示例性垂直导管模拟失重系统。
29.图10描绘了垂直导管模拟失重系统的实验设置。
30.图7描绘了通过光学显微镜以20倍观察到的微重力反应方解石(左)和单位重力反应方解石(右)的结果。
31.图8描绘了在单位重力(a、b、c)和微重力(d、e、f)下使用100%饱和溶液对方解石形成的sem成像的结果。a和d放大200倍;b和e放大倍数为2500倍;c和f放大10000倍。
32.图9描绘了在单位重力和微重力下形成的方解石的动态光散射(dls)表征结果。图1综合了所有数据。图2仅描述了使用100%饱和溶液形成的方解石。图3仅描述了使用50%饱和溶液形成的方解石。图4仅描述了使用20%饱和溶液形成的方解石。
33.图14是总结从观测单位重力和微重力方解石形成中收集的原始数据的表格。
34.图15是总结在单位重力和微重力下形成方解石的实验结果的表格。
35.图10描绘了研究基底材料对方解石形成时间的影响的实验结果。上图改变了cacl2的浓度,下图改变了na2co3的浓度。
36.图11描绘了研究ph对方解石形成的影响的实验结果。
37.图12描绘了研究温度对方解石形成的影响的实验结果。针对a(500
×
)和b(100
×
)的前体是在室温下,针对c(200
×
)和d(200
×
)的前体是在冰上。b和d是在偏振光下成像。
38.图13描绘了生长于玻璃和塑料表面上的方解石的sem成像结果。a(500
×
)和b(12000
×
)生长于玻璃上。c(1000
×
)和d(5000
×
)生长于塑料上。
39.图14描绘了使用不同前体浓度形成的方解石的动态光散射(dls)表征结果。
40.图15描绘了在单位重力下溶液中时间和颗粒形成的动态记录结果。
41.图16描绘了方解石和标准caco3和nacl在单位重力下的x射线衍射(xrd)结果。
42.图17描绘了在不同条件下形成的方解石的sem成像结果。a是以10000倍成像的使用50%饱和溶液在单位重力下形成的方解石。b是以10000倍成像的使用50%饱和溶液在微重力下形成的方解石。c是以10000倍成像的使用20%饱和溶液以单位重力形成的方解石。d
是以10000倍成像的使用20%饱和溶液在微重力下形成的方解石。
43.图18描绘了在不同饱和水平下形成的方解石的dls观察结果。
44.图19描绘了在失重飞行器上反应的方解石形成结果。
具体实施方式
45.本发明提供了地面失重系统(ground-based reduced gravity system)和使用该系统在正如存在于太空和其他失重条件下的接近真实微重力条件下评价、合成、调整(adapt)、改变、加工和生产生物和非生物、有生命和无生命的各种材料系统的方法。
46.定义
47.应当理解的是,本发明的附图和描述已被简化以图示说明与清楚理解本发明相关的元件,而同时为了清楚起见,剔除了本领域中常见的许多其他元件。本领域的普通技术人员可以认识到在实施本发明时其他元件和/或步骤是合乎需要的和/或被需要的。然而,因为这样的元件和步骤在本领域中是众所周知的,并且因为它们不利于更好理解本发明,则本文中就不提供对这样的元件和步骤的讨论。本文的公开内容涉及对本领域技术人员已知的这些元件和方法的所有这些变化和修改。
48.除非在别处定义,否则本文使用的所有技术和科学术语具有与本发明所属领域的普通技术人员通常理解的相同含义。尽管在本发明的实践或测试中能够使用与本文描述的那些相似或等效的任何方法和材料,但还是描述了示例性的方法和材料。
49.如本文所用,以下每个术语在本节中具有与其相关的含义。
50.冠词“一种”和“一个”在本文中用于指代冠词的语法对象中的一个或多个(即,至少一个)。例如,“一个元件”是指一个元件或多于一个元素。
51.如本文所用,当提及诸如数量、持续时间等之类的可测量值时,“约”旨在涵盖所指定之值的
±
20%、
±
10%、
±
5%、
±
1%和
±
0.1%的变化,因为这样的变化是合适的。
52.如本文所用,当提及腔室时,“限界(bounded)”旨在描述将腔室内部与腔室外部分隔开的物理边界。因此,限界腔室防止腔室的内容物自由逸出并与腔室外部的材料混合,以及防止腔室外部的材料自由进入并与腔室的内容物混合。物理边界可以是刚性或柔性外壳。物理边界也可以是两种不混溶液体之间的界面。应当理解,物理边界可以选择性地允许颗粒进入和离开,例如在半透膜和端口的情况下。
53.如本文所用,“密封地”旨在描述气密性、水密性的配件(fitment)。密封地配合(fit)第二组件中的第一组件将所述第一组件紧贴地(snugly)定位于第二组件内而防止气体、液体和固体穿过该密封配合。密封地配合第二组件的中空内部的第一组件能够用于将第二组件的中空内部分成多个分区(partition),而使每个分区内的气体、液体和固体与每个其他分区的气体、液体和固体牢固分隔开。
54.遍及本公开内容,本发明的各个方面能够以范围形式呈现。应当理解的是,范围形式的描述仅仅是为了方便和简洁,而不应该理解为对本发明范围的呆板限制。因此,范围的描述应该被认为已经具体公开了所有可能的子范围以及该范围内的各个数值。例如,对诸如1-6的范围的描述应该被认为具有具体公开的子范围,如1-3、1-4、1-5、2-4、2-6、3-6等,以及该范围内的各个数,例如,1、2、2.7、3、4、5、5.3、6,以及它们之间的任何整体和部分增量。无论范围的宽度如何,这都适用。
55.失重系统
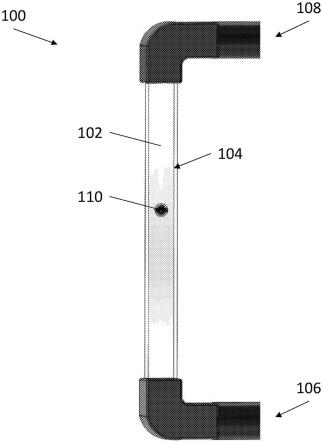
56.现在参考图1,描绘了示例性失重系统100。失重系统100包括至少一个导管102,该导管102具有在入口106和出口108之间延伸的至少一个腔(lumen)104。腔104的尺寸设计成配合限界腔室110。失重系统100构造设计成通过腔104接收任何合适的流体。在各实施方式中,该流体能够是气体、液体、凝胶或其组合。流体的流动能够处于闭合回路中,其中相同体积的流体以再循环模式,或在开路中,连续通过导管102而使流体源以单程流过导管102。在一些实施方式中,腔104包括构造设计成在没有流体流的情况下保持限界腔室110的内部平台或支撑件。合适的内部平台或支撑件不会阻碍流体流动,并且能够包括,但不限于,至少部分跨越腔104宽度的网孔或线板或一个或多个杆。
57.在一些实施方式中,入口106定位于比出口108高度低的高度处,而使流过腔104的流体克服重力引力而流动,并且定位于腔104内的限界腔室110被重力拉向入口106。导管102因此可能够置于保持入口106和出口108之间的相对定位的任何方向上。例如,导管102的方向能够用导管102的纵向轴线和水平面之间的一定角度进行描述,其中完全直立的导管102与水平面成90
°
角定向。在这种构造设计结构中,导管102的取向能够具有相对于水平面约1
°‑
90
°
的任何所需角度。在某些实施方式中,将导管102定向于相对于水平面90
°
的角度而模拟限界腔室110中的微重力,而同时将导管102定向于相对于水平面约1
°‑
90
°
的角度而模拟限界腔室110中失重。
58.失重系统100构造设计成通过以支撑限界腔室110的重量的速率抵抗重力引力而提供流体流动以模拟限界腔室110中的微重力和失重。以这种方式,限界腔室110保持于导管102内的一个恒定位置,基本上处于持续自由落体状态。为此,失重系统100能够还包括一个或多个流体导流器(例如,泵)、能量源、流体储存器、传感器、致动器(手动、气动、液压、电动等)、控制器(比例(p)、积分(i)、导数(d)及其组合,如pi、pd、pid,以非嵌入形式或作为微控制器)等。在某些实施方式中,失重系统100能够手动操作,其中操作者能够手动控制通过导管102的流体的流速以将限界腔室110保持于恒定位置。手动操作能够通过在导管102上添加一个或多个外部或内部标记以监测限界腔室110的位置而得到辅助。在某些实施方式中,失重系统100能够自动运行,其中流体流速能够通过一个或多个流量传感器进行监测;限界腔室110能够通过一个或多个光学传感器、定位器件、加速度计、陀螺仪、超声波传感器、电容式位移传感器等进行监控;而控制器能够自动调节泵速度和流量以将限界腔室110保持于恒定位置。自动调节在限界腔室110的内容物质量可变情况下是有帮助的,需要随着质量变化而调节流速。在各实施方式中,失重系统100能够支撑导管102的阵列,其中每个导管102能够被同时、按序或异步监测和控制。
59.在各实施方式中,失重系统100还能够包括一个或多个能量发射器。考虑的能量发射器包括,但不限于,激光、高和低辐射能、各种波长的光、红外发射器、紫外发射器、超声换能器、声波发射器、辐射发射器、磁场发射器、无线电波发射器、x射线发射器、电极等。能量发射器能够选择性地瞄准导管102、限界腔室110或二者的点、部分或全部,以用能量查询导管102和限界腔室110。能量发射器能够用于任何数量的应用,包括但不限于,电穿孔、光穿孔、光交联、加热、放射疗法、磁疗法等。
60.限界腔室110是尺寸设计成配合腔104并在腔104内自由移动的容器。限界腔室110包括围绕中空内部的外壳。该外壳防止中空内部的内容物和流过腔104的流体流之间的对
流混合。中空内部能够被分隔成任何数量的隔室(compartment)并构造设计成容纳任何所需的操作,包括但不限于,反应、实验、研究、制造工艺、制作工艺、疗法等。因此,限界腔室110涵盖大范围的器皿,范围从小型容器到构造成用于人类居住和/或入驻的房间大小和建筑物大小的构造。虽然限界腔室110被描绘为具有球形,但限界腔室110不限于任何特定几何形状。考虑的形状包括,但不限于,球体、圆盘、圆柱体、立方体、盒子等。
61.在某些实施方式中,限界腔室110能够被分隔成具有多个隔室,每个隔室容纳反应物。隔室能够进行定时或控制而在达到失重或微重力后将反应物释放到彼此中。在一些实施方式中,隔室能够流体连通到主汇合室(main combining chamber),而使反应物能够在达到失重或微重力之后同时或按序汇合。限界腔室110的考虑的应用包括,但不限于:材料合成和处理;从头材料合成与加工;材料结构、性能、加工和行为研究;工业结晶;薄膜沉积与加工;生物和生物材料合成与加工、蛋白质结晶;药物合成与加工;细胞、组织和器官的生长和再生;金属加工;玻璃合成与加工;合金合成与制造;制备;陶瓷合成与加工;聚合物合成与加工;半导体合成;材料组装与自组装;光纤制造、复合材料合成与加工;元件、装置、系统性能评价;增材制造;和生物制造等。
62.在某些实施方式中,限界腔室110是房间大小或建筑物大小的构建体。限界腔室110能够按比例缩放以允许动物和人类居住,并且包括居住区、实验室区、储藏区等。因此,限界腔室110能够用作短期和长期的微重力和失重实验的操作基础。在一些实施方式中,房间大小或建筑物大小的限界腔室110能够用于复制太空船,如太空舱、航天飞机或空间站中的条件。例如,房间大小或建筑物大小的限界腔室110能够用于复制、验证或替代在低轨道(例如,国际空间站)或外层空间中进行的实验。在一些实施方式中,限界腔室110能够用于娱乐或训练目的。以房间规模或建筑规模运行的地面失重或微重力系统能够是一种以成本效益高、安全且更容易获得的方式复制乘坐失重飞机的体验以进行娱乐或训练动物和人类进行失重和微重力操作。
63.现在参考图2和图3,描绘了示例性限界腔室200。限界腔室200包括包围中空内部204的球形外壳202。中空内部204被由环206、核芯208和塞子212构造成的分隔元件(barrier element)分隔成两半。在一些实施方式中,分隔元件能够还包括分隔件(spacer)210,其位于环206和核芯208之间。环206具有扁平圆盘形状,其外径尺寸设计成密封性配合中空内部204,而中心孔道尺寸设计成配合核芯208。核芯208包括具有尺寸设计成密封性配合环206的中空内径的外径的中空圆柱形。塞子212的尺寸设计成密封性配合核芯208的中空内部之内。塞子212包括临时阻塞核芯208的中空内部的机构,而使得在激活该机构时,塞子212解闭核芯208的中空内部而流体连通中空内部204的分隔半部。在一些实施方式中,塞子212的机构是机械的,如在设定的时间后或通过远程激活而以电子方式打开的闸门或阀门,或在发条机构消耗一定量的存储能量后打开的闸门或阀门。在一些实施方式中,塞子212的机构是基于材料的,如冰塞子、可溶解塞子或随时间熔化或破裂开的可降解塞子。以这种方式,限界腔室200构造设计成在两个分区的每一个中存储材料,并且在延迟之后,混合该两个分区。当在中空内部204内建立微重力或失重条件后需要两种材料之间的反应时,提供延迟混合是必要的。
64.在各实施方式中,本发明的限界腔室能够针对某些应用进行适当修改。例如,在限界腔室容纳需要有线连接、流体或材料传输系统或在使用期间要与失重系统100外部的系
统的一些其他临时或持续连接的操作的某些实施方式中,限界腔室能够包括系绳或可以临时连接或永久连接到外部系统的导管。外部系统能够包括能量源、生长培养基循环系统、空气或气体罐、废物去除系统、样本转移系统等。在某些实施方式中,限界腔室能够包括半透外壳或外壳包括半透膜的区域。例如,限界腔室可以容纳细胞培养物、组织培养物或一些其他活体有机体培养物。限界腔室可以悬浮于具有气体或营养物的流体流中,这些气体或营养物能够扩散穿过半透性外壳进入限界腔室的内部。同样,废料和所关注的分析物可以扩散穿过半透性外壳,离开限界腔室并进入流体流中而进行去除或取样。在一些实施方式中,限界腔室可以包括悬浮于与第一流体不混溶的第二流体流中的第一流体袋,其中外壳由第一流体和第二流体之间的不混溶界面构成。
65.失重系统100能够具有任何合适的尺寸。例如,在一些实施方式中,导管102具有的轴向长度尺寸大于限界腔室110的轴向长度。在一些实施方式中,导管102具有的宽度或半径使其相对于其轴向长度的纵横比足以容纳入口106和出口108之间的限界腔室110。在一些实施方式中,导管102能够具有任何合适的长度(即高度)或宽度,包括但不限于,约1cm-约100m或更大的长度和约1cm-约10m或更大的宽度。在一些实施方式中,导管102具有的长宽之纵横比为约1:1-约100:1。虽然导管102被描绘为管状,但应当理解的是,导管102可以具有任何所需的构造结构,包括方形截面、矩形截面、卵形截面等。同样,限界腔室能够具有配合导管102内的任何合适尺寸。在一些实施方式中,导管102能够具有环形横截面,而使同心导管构成对大气开放的最内腔和流体能够流过的环形腔。因此,限界腔室能够具有环形(donut)而配合具有环形横截面的导管102内。在一些实施方式中,限界腔室的尺寸能够定义为具有与腔104的截面面积成比例的截面面积。例如,限界腔室能够具有腔104横截面积的50%、60%、70%、80%、90%、95%或99%的截面面积。
66.失重系统100能够由任何合适的材料构成,如金属、塑料和聚合物,包括但不限于:不锈钢、钛、铝、硅酮、pvc、聚乙烯等。在一些实施方式中,某些组件或某些组件的部分能够由透明或半透明材料构成。本领域已知的任何合适的方法都能够用于制造这些组件。制作方法可以因使用的材料而异。例如,基本上包含金属的组件可以由较大的金属块铣削(mill)而成,或可以由熔融金属铸造而成。同样地,基本上包含塑料或聚合物的组件能够由较大的块体铣削、铸造或注塑成型。在一些实施方式中,3d打印或本领域常用的其他增材制造技术可以用于制造组件。在一些实施方案中,该方法能够嵌入其他组件,如电路、电极、磁体、二极管等,而使所得系统能够通电而支持电穿孔、光穿孔、电泳、磁场等。在各实施方式中,可以使用诸如蚀刻、光刻、沉积、旋涂、浸涂等技术而施加涂层、图案和其他精细特征。
67.使用方法
68.本发明还包括使用失重系统模拟微重力和失重条件的方法。正如本文别处所述,本发明的失重系统能够将限界腔室悬浮于抗重力流动的流体中,将限界腔室及其内容物维持于自由落体的恒定状态。
69.失重系统的独特功能使材料研究人员、材料加工人员和产品开发人员的不同团队能够评价部分/失重类似物,特别是微重力对物理、化学和生物材料和工艺的影响,支持与地球产品(earth-bound product)应用以及空间探索和开发应用相关的新材料和相关制造工艺的开发;制造对原子和分子结构和特性进行更谨慎控制的工程材料,这在地面条件下是不可能实现的;在真正的微重力条件下操作和评价设备和系统;缩放和自定义失重系统;
并在宽范围的加工时间和长度尺度内以失重条件操作失重系统。
70.现在参考图4,描绘了悬浮在模拟失重下的腔室的示例性方法300。方法300开始于步骤302,其中提供了失重系统,该失重系统包括至少一个导管,该导管具有至少一个在入口和出口之间延伸的腔,所述入口位于低于所述出口高度的高度处,和限界腔室,其尺寸设计成配合所述至少一个腔。在步骤304中,导管的纵向轴线相对于水平面或垂直于重力引力的平面成一定角度对齐。该角度可以是任何所需的角度,如约1
°‑
约179
°
的角度。在一些实施方式中,该角度可以为1
°
、5
°
、10
°
、20
°
、30
°
、40
°
、45
°
、50
°
、60
°
、70
°
、80
°
、90
°
、100
°
、110
°
、120
°
、130
°
、135
°
、140
°
、150
°
、160
°
、170
°
、175
°
、179
°
,或这些值之间的任何角度或角度范围。在一些实施方式中,导管102的角度可以改变而改变限界腔室所经受的重力量。在步骤206中,流体以支撑限界腔室而使所述限界腔室保持于导管内恒定位置的流速流入导管入口并流出导管的出口。考虑的流体包括,但不限于,水、细胞生长培养基、血清、血浆、油、凝胶、气体、氮气、惰性气体、空气、单相流体、多相流体、流体混合物等。在一些实施方式中,能够控制该流体的温度、ph、极性(极性或非极性)、粘度、密度、压力、化学性质、流变(flowdeformation)行为(牛顿或非牛顿流体)等。
71.在某些实施方式中,该流体的选择取决于限界腔室的密度和形状。如本文其他地方所述,在流体流中达到终速度后,由于支撑限界腔室重量的局部拖曳力(dragforce),而能够在限界腔室中产生失重感。合适流体的选择能够如下进行:对于质量为mb和直径db的实心球落入恒温流体介质中,自由落体力图表明质量为mb的物体仅在y轴上落下,而因此在x轴上没有力相互作用。在这种情况下,与物体相互作用的力包括(a)浮力fb,(b)将物体向下拉向地球质心的重力fg;和(c)由介质与物体表面积相互作用产生的拖曳力d。因此,该系统的力平衡为:
72.∑p
x
∑fy ∑fz=m*a方程(1)
73.请注意,在z轴或x轴上没有运动,即
74.∑f
x
=0,∑fz=0
75.然后,如果沿y方向向下作用的重力仅通过拖曳力d(空气或流体阻力)和浮力(fb)形式抵消,则这种情况下的力平衡将是:
76.∑fy=d f
b-fg=m*a
→
d fk=pg方程(2)
77.其中形式拖曳力d可以依据以下变量表示:
[0078][0079]
其中cd是拖曳系数,ρm[kg/m3]是介质密度,而ab是物体表面积,其中浮力fb定义于以下方程4中:
[0080]
fb=vb*ρm*g[n]方程(4)
[0081]
其中(vb)是物体体积(其中对于球体,),ρm[kg/m3]是介质密度,g是重力加速度。另外,回想一下由于重力作用于物体上的力为:
[0082]fg
=mb*g[n]方程(5)
[0083]
则它遵循:
[0084]
fg=vb*ρb*g[n]方程(6)
[0085]
求解终速度的方程3并代入各种项,就能够得出自由落体的以下终速度表达式方程7:
[0086][0087]
通过对方程7的检查,就能够看出,终速度与球形物体的直径(db)、物体(ρb)与介质(ρm)之间的密度差和重力加速度(g)成正比,以及与拖曳系数(cd)和介质密度(ρm)成反比。只要物体和介质之间存在相对运动,则就存在拖曳力和相关的拖曳系数cd。cd取决于介质的物理性质,也与介质的雷诺数(re)成比例。雷诺数是一个无量纲常数,定义为惯性力与粘性力的比值,用于确定由浸入流体中的物体(包括自由落体)的相对运动产生的拖曳力。拖曳力取决于物体的re和形状。为了确定终速度,重要的是定义所关注的系统的雷诺数,对于给定的物体几何形状,雷诺数能够用于确定拖曳系数cd。
[0088]
一般而言,雷诺数能够分为四个不同的区域:区域i:re《0.3;区域ii:0.3《re《1000;区域iii:1000《re《200000;和区域iv:re》20000。对于给定的区域和物体几何形状,可以应用终速度方程的修改版本。
[0089]
在区域i中,在球状物体移动通过介质(例如,气体或液体)的实例中,由于重力(fg)而在与其向下运动相反的方向上受到拖曳力(fd)。当拖曳力大小相等但方向与拉物体的重力相反时,达到终速度。区域i中物体的终速度由方程8给出,其中μm是介质的动态粘度,g如上所述定义为重力加速度,db是球直径,ρb表示球的密度,并且ρm是介质密度。常数18表示该动态条件下的拖曳系数值。
[0090][0091]
参考方程8,对于在区域i中自由落体通过所述介质的球形固体物体,物体的终速度取决于物体的直径和密度。只要物体的密度超过它落入的介质密度,就会有一个与物体相关的终速度。
[0092]
在区域ii中,以表面积和质量较大的物体为例,来自空气和重力的拖曳力较大;因此雷诺数也不同且更高。对于球形物体,能够通过方程9确定cd,如下所示:
[0093][0094]
在区域iii中,拖曳系数相对于自由落体的系统的几何形状几乎具有恒定值。例如,在球形物体的情况下,cd为0.44,因此能够修改球形物体的终速度方程,如方程10所示
[0095][0096]
实质上,基于限界腔室的密度能够选择该流体,其中限界腔室的密度大于流体的密度。在一些实施方式中,将限界腔室的密度改变为大于所选定流体的密度可能更可行的。例如,可以将一个或多个权重添加到限界腔室,或可以将限界腔室封装于更高密度的外壳中。
[0097]
这些方法能够用于材料科学与工程领域,与材料、组件和器件制作相关的研究和开发领域。此外,还有许多研究、开发、修改和利用地球上的制造或自组装材料的相关的现有和新兴领域和行业,以及设想在其他环境,如太空,以及其他所谓的极端环境中利用制造
或自组装材料的新兴产业。
[0098]
其他相关领域包括,但不限于,物理科学(例如,化学、生物化学、物理学、地质学、地理学)、生命科学(例如,生物学、发育生物学、微生物学、生殖生物学、免疫学、医学科学);工程(例如,航空航天工程、生物工程、化学工程、土木与建筑工程、计算机科学与工程、电气工程、材料科学与工程、机械工程、核工程);生物技术;信息/通信技术;微电子/电子学;等等。
[0099]
这些方法也能够用于相关行业的制作和制造,包括但不限于:航空航天、汽车、化学、服装、建筑/住房、化妆品、能源、医疗保健、食品、制造、医疗设备/技术、微/纳米电子、制药、运输等。同样,这些方法能够用于在失重条件下操作、评价和验证地面和空间应用的装置和系统,如分析设备、医疗装备、生物反应器等。
[0100]
实验实施例
[0101]
下面结合实验实施例对本发明进行进一步详细说明。提供这些实施例仅用于举例说明目的,并非旨在是限制性的,除非另有说明。因此,本发明绝不应该解释为限于以下实施例,而是应该解释为包括由于本文提供的教导而变得明显的任何和所有变化。
[0102]
在没有进一步描述的情况下,据信本领域的普通技术人员能够使用前面的描述和下面的说明性实施例而制备和利用本发明的化合物并实施要求保护的方法。因此,以下工作实施例具体指出了本发明的示例性实施例,并且不应该解释为以任何方式限制本公开的其余部分。
[0103]
实施例1:在单位重力环境下的模拟无微重力无对流条件下研究矿化过程
[0104]
以下研究探讨了在单位重力环境下运行时模拟微重力条件的测试系统的可行性。该研究还通过检查微重力条件下碳酸钙(caco3)晶体的成核和生长而评估该测试系统。
[0105]
方解石矿化
[0106]
本研究的一个目标是开发标准技术而针对选定的化学前体浓度和所需的环境条件,在单位重力下可重复地进行方解石矿化反应,如下面的方程式1所述。此外,还进行了所选定的表征技术,并如下进行更详细描述。
[0107]
cacl2 naco3→
caco3 2nacl方程(11)
[0108]
方解石前体浓度:对caco3成核和生长的影响
[0109]
cacl2(溶液a)和naco3(溶液b)的原液用作碳酸钙(caco3)形成的前体。从氯化钙的溶解度限制(0.0745gcacl2在1ml去离子(di)和反渗透水中)开始,连续稀释至氯化钙的饱和浓度(溶液a)。类似地,一系列碳酸钠溶液(溶液b)也是在t=25℃和ph=7时由其在水中的溶解度限制(0.0714gna2co3在1mldi水中)开始而制备。溶液(a和b)通过在di水中溶解固体化学物质而制成,并储存于干净250ml玻璃瓶中。重量测量值的方差为 /-5%。
[0110]
在单位重力条件下进行的方解石矿化研究如下进行。使用干净的塑料移液器将2ml溶液a和溶液b从装有原液前体溶液的玻璃瓶中转移到干净试管中,然后轻轻混合。方解石的形成定性确定为溶液a和溶液b的透明混合物经历肉眼可清楚观察到的颜色变化的时间。方解石的形成也通过x射线衍射(xrd)进行定量验证。请注意,使用了两组试管;一组用于仅包含清澈去离子水的对照,而另一组包含方解石前体混合溶液。蓝色背景和固定于反应上方的灯具用于增强方解石形成的直接可视化。
[0111]
矿物形成和转化的速率和机制由溶液中和溶液-矿物界面处的条件调节。热力学
因素调节矿物结晶过程,并包括溶液ph、矿物饱和度、离子强度、温度和离子缔合程度。在这项研究中,仅研究了溶液ph和表面能对方解石矿物形成的影响。
[0112]
ph对方解石形成变化的影响
[0113]
ph对方解石形成的影响通过改变方解石矿化实验中使用的蒸馏(di)水的ph(5《ph《7)而进行。
[0114]
表面能对方解石成核的影响
[0115]
在矿物如方解石的异质成核中,稳定固体方解石晶核会在溶液-矿物界面,即,容器壁上形成,并且只有当系统中的活化能垒被克服时才会形成。因此,玻璃和塑料混合室(即,试管)可以对方解石的成核和生长产生潜在影响,保证了表面能量对方解石成核和生长影响的初步研究。通过将氯化钙[cacl2=0.0018625g/ml]与碳酸氢钠[na2co3=0.001785g/ml]混合并使用1/4000(s)相机捕获,在不同反应室系统存在下研究方解石成核和生长。使用微滤分离方法收集xrd验证的方解石样品。
[0116]
方解石反应室
[0117]
由于本研究的目的是探索单位重力环境下的微重力条件下方解石的成核和生长,因此需要和要求设计一种新测试系统,以实现该项目的目标。设计目标是设计一个反应室,允许两种分离的方解石前体在保持于终速度条件下的透明固体室中混合。同样重要的是,该反应室允许前体溶液a和溶液b的原位反应仅在反应室置于微重力条件下之后才开始,并且随后允许反应在微重力影响下进行。另一个关键的设计规范是反应室(设想浸入运行于一个动态流体流动系统中,作为最小化任何外力的实用手段),将没有大量对流流体运动,因为它将会避免随着反应进行而保持的少自由对流条件。
[0118]
在概念生成中考虑的反应室设计的主要概念之一是一个系统,该系统包括一个由包含一个能够填充和储存独立腔室内的方解石前体溶液a和溶液b的储存室的两个半体组成的透明塑料外壳,直至经过预定时间段才诱导这些前体溶液混合。
[0119]
将此概念转化为实验反应器测试系统导致开发出一个包含两个隔室的球形外壳,每个隔室都有两个小入口部,一个用于注入方解石反应物,而另一个用作排气孔以允许空气从腔室中置换排出并排放到大气中。反应室外壳根据透明塑料胶囊的改进进行设计,该塑料胶囊用于将小玩具装在较大的包装中,在零售店出售,并也用于商业玩具自动售货机。由一个直径为15.5毫米的空透明塑料球组成,在每一半体的顶点钻两个孔道。
[0120]
通过一次性注射器计量器(gauge)18将1ml已知浓度的溶液a和b注入每个半反应室,这些半反应室用临时阻隔件(barrier)以序列方式隔开,以避免过早混合,而同时允许空气进行置换并经由另一个孔道排放到大气中。填充流体储存器后,注射口和空气置换口都用封口膜(parafilm)密封。请注意,重要的是,将反应室的中心重力保持于反应室中部或非常接近反应室中部,以最小化放置于流场中时反应室的旋转和反应室中无意的流体混合。溶液a和溶液b的密度使用比重计(pycnometer)测定,并在需要时进行相应调整。
[0121]
所需要的一个关键设计特征是反应室元件,其能够以延迟诱导方解石前体溶液的混合直到需要这样的时间并且一旦使用而不会干扰随后的化学反应机理的方式发挥作用。这样的反应室特征将需要满足组装反应室所需的延迟时间并用溶液a和溶液b润壁(prime),而同时仍有额外的时间将反应室放置于允许利用额外时间以达到微重力条件的微重力测试系统(下文更详细描述)中之后混合方解石反应物。
[0122]
满足该反应室特征所需规范的设计理念是玻璃管,其穿过(transfix across)薄的实心圆形有机玻璃(plexiglass)元件。这种复合材料结构的关键特点是能够将该元件暂时浸入直径比反应室稍小的单独球形外壳中,然后装满水,之后将其随后冷冻。一旦这个中间层的冰阻隔元件被冻结,它就能够紧贴放置于反应室中,而充当反应器混合延迟元件。
[0123]
一旦完全组装,然后就可以将方解石反应物(溶液a/溶液b)注入反应室,如上简单所述,然后将反应室立即放入下面描述的微重力测试系统中,并有足够的时间使该测试系统在冰融化和随后的反应物混合之前达到微重力条件。如图3,左(无冰)和图3,右(有冰)中示意性描述,这个中间层冰阻隔元件由四个组件组成:哑铃形的固体连续冰段(0.8ml h2o)、玻璃圆柱芯(7.5
×3×
4mm3)、柔性塑料层和一个强力配合反应室外壳的中间部分的刚性有机玻璃(plexiglass)塑料环(1
×2×
13.5mm3)。每个反应室组件都用封口膜包裹,以避免反应物泄漏和稀释。
[0124]
完全组装时,反应室系统能够容纳最高达1ml流体(反应物),去除等体积的置换气体(空气),在所需的延迟时间内分开反应物,并配合可以容纳直径最高达1.5cm的球形反应器系统的微重力诱导流体实验系统,如图2中所示。完全组装的反应室的示意图如图5中所示。
[0125]
请注意,在单位重力和模拟微重力条件下都进行的方解石反应测试中都考虑了中间冰阻隔件溶解造成的稀释效应。随着反应室设计完成,实验部分的其余部分描述所设计的模拟微重力测试系统以及操作程序和条件。
[0126]
模拟微重力测试系统和环境
[0127]
回顾本次研究的假设是按照能够与在单位重力条件下进行的相同反应进行比较的方式确定在模拟微重力环境中研究矿物成核和生长的可行性,因此还需要设计微重力测试系统,其允许方解石成核和生长产生的颗粒达到“终速度条件”。这些微重力测试系统的另一个要求是它们在反应室中不存在由外部流体流动扰动产生的明显整体(bulk)流动条件。这一要求将确保在模拟微重力条件下基本上不存在由重力场下运行的反应室内产生的自由对流效应。
[0128]
现在满足了这些实验测试规范,在本研究中设计和使用了一个包括垂直刚性导管设计的实验系统,该导管设计以类似于众所周知的“电梯中的自由落体”条件的方式模拟微重力。
[0129]
垂直导管模拟微重力系统
[0130]
该目标是开发一个实用的模拟微重力的台式模型。一种有吸引力的系统,如图6所示,使用h2o的单向单程流(来自实验室水龙头)进行操作,并且易于组装和拆卸。因此,它能够在不超过冰从中间层分离阻隔件溶解的时间的时间框架内接收反应室外壳。该测试装置的构造和使用都非常简单。它由用于流动和可视化的透明塑料管(30
×
38
×
360毫米)、连接器和软管(游泳池排水软管-直径为44毫米,长度为640毫米和510毫米)构成。其余组件包括20cm连接器、软管夹、封口膜和特氟龙胶带。连接到水槽和水流,该系统允许从底部到透明管通道顶部一维流动。反应室密度随反应时间的变化通过增加的外部流量得到补偿。
[0131]
在操作中,将完全准备和组装的反应室(带有外部重量的球形球体)从易于拆卸的透明管顶部落入垂直导管测试部分的流场中。一旦反应室保持于一个基本上指示达到终速度条件的固定高度,使用方解石形成的直接可视化确定单位重力和模拟微重力实验结果之
间形成时间的任何差异。
[0132]
材料表征和验证
[0133]
本研究的目的是检查微重力对方解石初期矿化的影响。还需要对反应室外壳进行额外修改,以考虑在微重力条件下发生的方解石成核和生长引起的密度差异。具体而言,这需要通过添加铜膏(密度=7.8g/cm3)而改变反应室透明塑料外壳的密度,该铜膏包含铜塑料着色剂和作为粘合剂的透明指甲油。
[0134]
使用由廷德尔(tyndall)效应引起的颜色变化确定单位重力和微重力条件下的相对方解石形成。光与颗粒表面的相互作用使颜色发生变化;在这种情况下,颜色由透明变成白色。
[0135]
除了通过直接可视化技术确定方解石形成之外,还使用了染色方法。对于钙基晶体,使用茜素红(alizarin red),当它与钙反应时,测试液体会从橙红色变为深粉红色。因此,它用于确定方解石反应中钙的存在。染色的限制取决于茜素红的形成条件以及ph敏感性。
[0136]
方解石颗粒的分布包括光学显微镜、扫描电子显微镜(x1-30)(sem)。使用beckman coulter delsa nano系统进行动态光散射(dls),提供方解石成核和生长的定量实时动态信息。dls用于表征单位重力和微重力条件下的方解石成核和生长,即实时尺寸和尺寸分布。最后,利用x射线衍射验证系统中使用白色粉末的方解石形成。
[0137]
模拟的微重力的结果
[0138]
图7左侧显示了微重力构建方解石,右侧显示了单位重力构建方解石。这张图片是用显微镜拍摄的。随后是xrd、sem和dls数据。为获取更多晶体形态信息而拍摄的sem图像,图8是饱和溶液和形成(develop)方解石的sem图像,a、d是500
×
放大的方解石,b、e是2500
×
放大,c和f是10000
×
放大。a、b和c是在单位重力下形成的,而d、e和f是在模拟微重力下完成的。
[0139]
实验完成后进行单位重力和微重力的dls(动态光散射)结果。图9显示了这些测试的结果。由单位重力和微重力(垂直管道)的观察收集的原始数据如表1中所示。
[0140]
表1.由观察单位重力和微重力方解石形成收集的原始数据
[0141]
[0142][0143]
该研究项目的总体目标是评价单位重力环境中研究微重力对矿化系统影响的可行性。为了实现这一目标,有必要设计一个原型实验测试系统,其可以模拟对于方解石矿物的成核和生长的微重力条件。如表2中所示,将详细讨论最相关结果的总结。
[0144]
表2.单位重力和微重力下形成方解石的实验结果
[0145][0146][0147]
单位重力下的方解石形成
[0148]
在该项目开始时,进行了一系列实验研究微重力对方解石成核和生长的影响。在这项研究中,使用了对方解石形成的直接目视观察,根据溶液颜色的明显变化,可以形成35μm以上的方解石颗粒。检测到颜色变化的时间通常在矿物初始成核之后很长时间。以这种
方式研究了在宽饱和度(20%-100%饱和度)范围内方解石溶液的成核和生长。从直接观察方解石矿化获得的结果如图10所示。正如图中显而易见,该数据表明幂律(power law)依赖于方解石前体浓度。如图10所示,随着反应物浓度降低,首次观察方解石形成的时间增加。随着反应物浓度的增加,观察到方解石形成的位置从反应室的壁(异相成核)变化到溶液(均相成核)。由于溶液a和溶液b之间的密度略有不同,则这决定始终将溶液b与溶液a混合,其中溶液b的密度更高。
[0149]
在初始测试期间,观察到方解石形成时间的显著变化,这要溯源于系统中去离子(di)水的ph值。如图11所示,即使制成溶液a和溶液b的di水的ph值相差一个ph单位,也会以反应延迟的形式显著改变方解石的形成速率。
[0150]
最初组实验是在平底玻璃试管中进行。这些玻璃试管被非常仔细地清洗过。这些测试在塑料管中重复进行,因为异质成核和生长过程会受表面能量影响。尽管这些如图12所示的初始实验的结果没有显示塑料和玻璃表面之间的很大差异,但由图13中的sem获得的图像确实证实了玻璃和塑料表面之间不同的晶体形态。然而,玻璃和塑料之间的方解石粒度分布似乎大致相同。
[0151]
这一系列实验测试的另一个因素是用于方解石矿化的反应物溶液的温度差异。在这些实验中使用0℃和25℃(室温)的原溶液温度。所获得的方解石样品用sem成像并且所获得的结果显示于图13中。正如能够看出,方解石晶体的形态相似,而唯一的区别在于粒度分布。此外,0℃的方解石前体溶液似乎比保持于室温下的溶液产生更多的晶体。对所研究的所有方解石前体浓度进行的动态光散射测试的结果总结于图14和图15中。dls数据表明,成核和生长时间(系统中首次出现的时间)随着前体浓度的降低而增加。茜素红染色试验初步表明系统中存在钙。xrd表征用于确证方解石的形成,正如本节后面的讨论。
[0152]
反应器外壳设计
[0153]
为材料合成目的开发了一系列替代反应器外壳设计概念;在本文中,材料合成与在单位重力测试环境中的微重力测试条件下研究方解石矿化有关。这部分研究的一个关键目标是开发一种反应器外壳,它能够保持反应物隔离,直至建立测试条件。反应器外壳选择为球形以增强流动稳定性,并且其中球体的每一半体都有两个进入孔道;一个孔道用于注入溶液(溶液a或溶液b),另一个孔道用于置换空气。使用具有最初用冰阻隔的运输管的塑料插入件密封反应器中部,以使溶液a和溶液b仅在单位和微重力条件建立之后和与方解石前体反应之前进行混合。在这个设计中,在球形反应器用隔离的溶液a和溶液b反应物溶液构建成的时间与将其置于模拟微重力中的时间之间存在约98秒的延迟。选择冰,因为需要一种可降解材料隔离所述反应物而不干扰反应。研究了一系列不同的可降解设计,但大多数都出现了主要与初期成核有关的复杂性。在最终的设计中,该系统的核芯是一个玻璃管,其中冰呈哑铃状,如图16所示。基于此设计,保持通道封闭最长达180(s)所需的冰量为约0.8ml。本研究的另一个设计标准是针对颗粒尺寸和频率的终速度调节。
[0154]
模拟微重力系统及结果
[0155]
设计了垂直流动导管,其能够获得方解石矿化的终速度条件。使用该系统进行了实验性微重力模拟,随后分析所收集的样品。选择了三种方解石饱和条件:20%、50%和100%饱和。
[0156]
对样品实施光学和扫描电子显微镜。从光学显微镜获得的结果呈现于图8中,由此
可以看到单位g和微g条件之间的颗粒数量和形状的变化。此外,sem结果揭示了颗粒的明显形态差异(图17)。更具体而言,饱和的单位g样本显示出更明确的几何形状(立方体形式),而微-g样品显示出更球形的形状。xrd结果表明微重力样品中存在非方解石的有机材料而单位重力样品中则不存在(图9);污染可能是这种观察的原因。在图9中,对于单位重力的50%饱和试验条件下,晶体大多呈立方体形式,但在微-g中存在立方体和球形之间的变化,这与在100%饱和微-g试验结果中看到的情况相似。部分c和d代表单位g的立方体几何结构和微g样品的非常不规则的几何结构。
[0157]
在单位-g和微-g实验之后从dls运行获得的结果推断(图18),表明该饱和溶液在单位-g中提供了比微-g更大直径的方解石颗粒。50%饱和的结果,导致在模拟微g中产生的颗粒比单位g中多,而20%饱和的结果也有类似的趋势。
[0158]
由图14中提供的直接目视观察获得的结果在所有情况下都表明单位g和微g之间方解石矿化的显著时间延迟。计算的终速度是基于相等而反向的力应该抵消重力的假设,在这种情况下,通过水在相反方向流动以将球形反应器保持于恒定高度的流速,悬浮于垂直导管中部以模拟微重力条件而实现。从这些实验获得的结果(在图15中加亮显示)表明饱和条件下的终速度比模拟微重力条件下的理论值低~11%。认识到实验误差的各种来源,(例如,用于封闭系统的封口膜 /-0.02克和用于移动化学品的注射器有 /-0.1毫升的误差,以及在系统中会产生气泡的机会,这能够直接影响反应器外壳的平均密度),如图18中所示的结果似乎并非是飞行器。
[0159]
如前所述,该目标是开发一个微重力系统,并相对于先前数据验证结果,如图19中所示。该图表明参数τ是通过快速dls收集的成核时间相对于1/ln(1 σ)2,其中σ是饱和度。在该图中,它表明,微重力线的斜率为单位重力线斜率四倍更高。对于由本文报道的垂直导管系统获得的结果,这些结果是一致的(参见图14)和(sem和光学)显微镜结果。在图15和图18中呈现的数据中,无法原位进行dls;因此,微重力运行的时间和dls数据记录的时间之间存在时间差。xrd结果表明微重力和单位重力之间的差异可能会影响成核和生长过程。最后,如图18所示,对于在单位g条件下首次获得的结果,单位重力和微重力之间观察到明显的时间延迟。这些结果与由地面上抛物线飞行系统获得的图19所示的结果一致。
[0160]
本文引用的每个和所有专利、专利申请和出版物的公开内容均通过引用以其全部内容结合于本文中。尽管本发明已经参照具体实施方式进行了公开,但显而易见的是,本领域的其他技术人员可以不背离本发明的真实精神和范围而设计出本发明的其他实施方式和变型。所附权利要求旨在解释为涵盖所有这样的实施方式和等效变体。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。