技术特征:
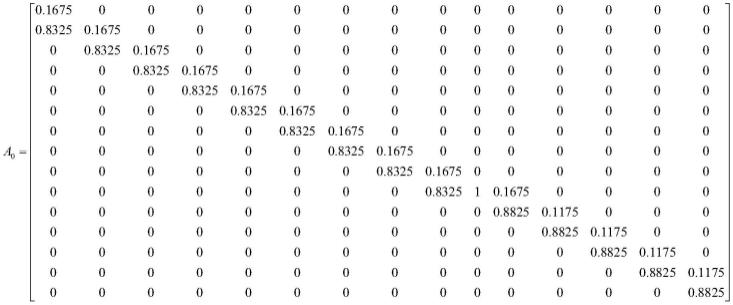
1.一种智能网联环境下道路风险预警控制器优化布设方法,其特征在于,包括:将路网分割成n个路段,每个路段称一个元胞,并将划分好的元胞依次标定序号;以元胞的交通流密度作为状态变量,建立包含n个元胞的混合交通流模型:x(t 1)=a
σ(t)
x(t) b
σ(t)
u(t) f
σ(t)
式中,x=[x1,
…
,x
n
]
t
表示路网的交通流密度向量,u=[u1,
…
,u
k
]
t
表示路网的交通需求,a表示系统矩阵,b表示输入矩阵,f表示仿射向量;获取每个路段内车辆总数量和自动驾驶车辆数量,并基于车辆总数量和自动驾驶车辆数量计算自动驾驶车辆的混入率;基于混合交通流模型和自动驾驶车辆的混入率,计算不同自动驾驶车辆混入率下的系统矩阵集合a:a={a1,a2,
…
,a
m
}式中,a
m
为第m种自动驾驶车辆混入率的系统矩阵,系统矩阵为n
×
n;基于混合交通流模型,设计输入矩阵b
i
,输入矩阵为n
×
k,1≤k≤n:利用系统可控性秩判据,计算rank(a
m
,b
i
)的值是否为n;若是,则保留输入矩阵b
i
,若不是,则删除输入矩阵b
i
;筛选满足所有自动驾驶车辆混入率情况下的输入矩阵,并从筛选的输入矩阵中选择布设位置最佳、数量最少的输入矩阵作为控制矩阵;基于所述控制矩阵,进行控制器的布设。2.如权利要求1所述的智能网联环境下道路风险预警控制器优化布设方法,其特征在于,所述路网的分割方法,包括:按照路网中入口匝道、出口匝道的数量和位置、车道数变化位置以及道路曲率半径发生变化的位置,将路网分割为n个路段。3.如权利要求1所述的智能网联环境下道路风险预警控制器优化布设方法,其特征在于,所述获取每个路段内车辆总数量和自动驾驶车辆数量,并基于车辆总数量和自动驾驶车辆数量计算自动驾驶车辆的混入率,包括:基于视频检测器获取每个路段的驶入车辆数n
视频驶入
和驶出车辆数n
视频驶出
,并计算该路段的车辆数n
视频
;和/或,基于微波检测器获取每个路段的驶入车辆数n
微波驶入
和驶出车辆数n
微波驶出
,并计算该路段的车辆数n
微波
;将n
视频
中n
微波
中的一种或多种结果融合后得到的作为该路段的车辆总数量n;基于网联自动驾驶车辆检测器获取每个路段的驶入自动驾驶车辆数m
上游驶入
和驶出自动驾驶车辆数m
下游驶出
,并计算该路段内的自动驾驶车辆数m1;和/或,基于边缘计算单元实时接收到的自动驾驶车辆的车辆信息,并计算该路段内的自动驾驶车辆数m2;和/或,基于自动驾驶车辆之间的实时车辆信息传递,计算出当前路段内任一自动驾驶车辆附近且在当前路段范围内的自动驾驶车辆数,并计算该路段内的自动驾驶车辆数m3;将m1、m2和m3中的一种或多种结果融合后得到的作为该路段的自动驾驶车辆数量m;
基于该路段的车辆总数量和自动驾驶车辆数量,计算当前路段自动驾驶车辆的混入率。4.如权利要求3所述的智能网联环境下道路风险预警控制器优化布设方法,其特征在于,n
视频
=n
路段
n
视频驶入-n
视频驶出
n
微波
=n
路段
n
微波驶入-n
微波驶出
m1=m
路段
m
上游驶入-m
下游驶出
式中,n
路段
为上个采样周期内该路段的所有车辆数,α1、α2为权值,m
路段
为上个采样周期内该路段的所有自动驾驶车辆数,λ1、λ2、λ3为权值。5.如权利要求4所述的智能网联环境下道路风险预警控制器优化布设方法,其特征在于,权值α1、α2的确定方法包括:在每个采样周期内进行循环计算,求出标准差最小值对应的权值组合对{α1,α2}作为最终的权值:式中,式中,式中,6.如权利要求4所述的智能网联环境下道路风险预警控制器优化布设方法,其特征在于,权值λ1、λ2、λ3的确定方法包括:在每个采样周期内进行循环计算,求出标准差最小值对应的权值组合对{λ1,λ2,λ3}作为最终的权值:式中,式中,式中,式中,7.如权利要求3所述的智能网联环境下道路风险预警控制器优化布设方法,其特征在于,当前路段自动驾驶车辆的混入率φ为:8.如权利要求1所述的智能网联环境下道路风险预警控制器优化布设方法,其特征在于,基于混合交通流模型所设计的输入矩阵的总数量n
输入矩阵
为:
9.如权利要求1所述的智能网联环境下道路风险预警控制器优化布设方法,其特征在于,所述控制矩阵的确定方法,包括:筛选满足所有自动驾驶车辆混入率情况下的输入矩阵以及对应控制器的位置;判断是否存在相同数量的控制器;若存在,则选取布设位置最佳的输入矩阵作为控制矩阵;若不存在,则选取数量最少的输入矩阵作为控制矩阵。10.一种智能网联环境下道路风险预警控制器优化布设系统,其特征在于,用于实现如权利要求1~9中任一项所述的智能网联环境下道路风险预警控制器优化布设方法。
技术总结
本发明公开了一种智能网联环境下道路风险预警控制器优化布设方法及系统,包括:将路网分割成n个元胞,并建立包含n个元胞的混合交通流模型;获取每个路段内车辆总数量和自动驾驶车辆数量,并计算自动驾驶车辆的混入率;基于混合交通流模型和自动驾驶车辆的混入率,计算不同自动驾驶车辆混入率下的系统矩阵集合A;基于混合交通流模型,设计输入矩阵B
技术研发人员:郭宇奇 朱丽丽 李唯琛 高剑 李婉君 张金金 牛树云 李茜瑶 贺瑞华 车晓琳 黄烨然 卢立阳
受保护的技术使用者:交通运输部公路科学研究所
技术研发日:2022.04.26
技术公布日:2022/7/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。