1.本发明涉及转运设备,具体涉及一种危险品转运设备。
背景技术:
2.易燃、易爆、有毒危险品,如油脂、松香、硫磺、硝酸钾、硫磺、木炭粉末等,常用形状、规格不一的箱体承装转运。常规转运设备针对这些箱体多采用填充发泡材料的方式进行限位防护,工作人员难以避免与危险品箱体的接触,容易导致人身伤害;此外,填充料在转运到位后常被丢弃,存在环境污染及浪费。
技术实现要素:
3.发明目的:本发明的目的是提出一种能够在无接触情况下,对各型危险品箱体进行限位防护的转运设备,保证转运安全。
4.技术方案:本发明所述的危险品转运设备,包括底座,底座上设有收纳箱,收纳箱的箱体内自下而上依次设有底板、弹性伸缩管和置物板,弹性伸缩管连接底板和置物板;箱体内壁设有气囊,气囊通过输气管与底板相连;底板中开设的气道连通弹性伸缩管、输气管及气囊;箱体顶部通过横向插接防护盖板封闭,该防护盖板带有坡面,用以在插接时推动危险品箱体及置物板向下移动。
5.本发明中,当危险品箱体放置在置物板上后,危险品箱体的自重使得置物板向下移动,盖合防护盖板时还能使置物板进一步向下移动;在置物板向下移动的过程中,弹性伸缩管受到挤压,其内的气体输送到气囊中,通过膨胀的气囊包裹危险品箱体。在拔出防护盖板后,气囊中的部分气体卸到弹性伸缩管中,松开危险品箱体,同时置物板上移一小段距离,方便取出危险品箱体。整个过程中,工作人员仅需要关上或打开防护盖板,不需要接触危险品箱体;收纳箱内部结构使得其能够对大小、形状不一的危险品箱体进行自适应包裹防护,通用性强,可重复利用,不需要担心环境污染及浪费。
6.进一步地,底座上转动连接有第一螺杆;收纳箱的数量为多个,沿第一螺杆两侧设置,箱体上的防护盖板插接口朝外;同侧收纳箱的防护盖板固定在衔接板上,衔接板内侧固定有内螺纹套管,内螺纹套管中螺纹连接有第二螺杆;第一螺杆通过设置在转运设备上的驱动机构驱转,第一螺杆与两根第二螺杆之间通过锥齿轮传动,使多个防护盖板同步开启或关闭。本技术方案中,转运设备单次能够转运更多的危险品箱体。
7.进一步地,底座上固定有l型扶手架;所述驱动机构包括手拉杆、锁定机构、牵拉绳、线盘和弹簧盒,手拉杆和锁定机构设置在l型扶手架上;线盘固定在第一螺杆底部伸出底座的一端,牵拉绳一端绕接在线盘上,另一端与手拉杆相连;拉动手拉杆使第一螺杆旋转关闭防护盖板,锁定机构用以锁定手拉杆的位置;弹簧盒设置在底座底部,弹簧盒内的涡卷弹簧与第一螺杆相连,当锁定机构释放手拉杆时,用以使第一螺杆反转打开防护盖板。
8.进一步地,l型扶手架上开设有方孔,所述方孔两侧开设有供手拉杆横向移动的导轨槽;锁定机构包括固定在导轨槽侧壁的第一杆件,第一杆件上通过橡胶连接件连接有第
二杆件;在手拉杆的端部开槽并在槽内设有第二弹簧,第二弹簧另一端连接有顶杆;顶杆、第一杆件和第二杆件各自的端部设有斜面,其中第一、第二杆件的斜面朝外,顶杆的斜面与第一杆件的斜面平行;手拉杆与l型扶手架之间固定有第一弹簧;拉动手拉杆关闭防护盖板时,第一弹簧压缩,顶杆移动到第一、第二杆件之间锁定;当继续拉动手拉杆,使顶杆移动到第二杆件外侧后,第一弹簧驱动手拉杆使第二杆件贴靠第一杆件,并使顶杆移动到第一杆件左侧,释放手拉杆。
9.本技术方案中,通过手动操作手拉杆即可完成多个防护盖板的开启或关闭,使用便捷性高。
10.进一步地,底座底部设有滑轮,底座和l型扶手架上开设有穿线孔,牵拉绳绕过滑轮,穿过穿线孔后与手拉杆相连。
11.进一步地,底座上设有滚轮机构,方便移动危险品转运设备。
12.进一步地,滚轮机构包括滚轮安装板,滚轮安装板上设置万向轮;底座内开设有腔体,滚轮安装板设置在所述腔体中,滚轮安装板螺纹连接在第一螺杆上;当第一螺杆转动时,滚轮安装板在所述腔体中上下移动,使万向轮伸出或收回底座。滚轮机构和防护盖板基于第一螺杆实现联动,当防护盖板关闭后,万向轮伸出,方便转运;当防护板开启后,万向轮收回,能够保证转运设备放置平稳,以便保证后续危险品箱体能够安全取出。
13.进一步地,万向轮上设有阻尼筒和减震弹簧,能够在转运过程中吸收震动。
14.进一步地,所述危险品转运设备搭载在无人机上进行转运,通过无人机转运,配送效率高,不需要驾驶推运人员,即使发生爆炸事故也不会造成伤亡。
15.有益效果:本发明与现有技术相比,具有如下显著优点:本发明提高了危险品转运的安全性,同时具有适用性强,环境友好,成本节约等优点。
附图说明
16.图1是本发明的结构示意图;
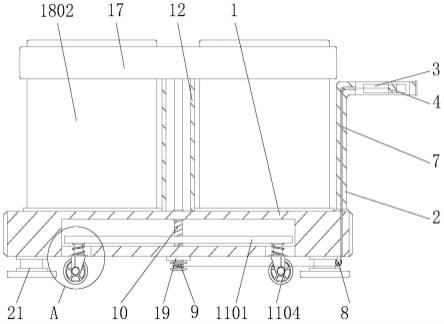
17.图2是图1的正视图;
18.图3是图2的局部a放大图;
19.图4是图1的俯视图;
20.图5是图4的局部b放大图;
21.图6是收纳箱内部结构示意图;
22.图7是第一、第二锥齿轮间的配合结构示意图;
23.图8是涡卷弹簧的结构示意图;
24.图9是本发明搭载在无人机上的示意图;
25.附图标记:1、底座;2、l型扶手架;3、导轨槽;4、手拉杆;5、第一弹簧;6、锁定机构;601、第二弹簧;602、顶杆;603、第一杆件;604、导向件;605、第二杆件;606、橡胶连接件;7、牵拉绳;8、滑轮;9、线盘;10、第一螺杆;11、滚轮机构;1101、滚轮安装板;1102、阻尼筒;1103、减震弹簧;1104、万向轮;12、传动件安装座;13、第一锥齿轮;14、第二锥齿轮;15、第二螺杆;16、内螺纹套管;17、衔接板;18、收纳箱;1801、防护盖板;1802、箱体;1803、置物板;1804、弹性伸缩管;1805、底板;1806、输气管;1807、气囊;19、弹簧盒;20、涡卷弹簧;21、支腿。
具体实施方式
26.下面结合附图对本发明作进一步详细说明。
27.如图1至图8所示,一种危险品转运设备,包括底座1,底座1上端面设置有四个收纳箱18,该四个收纳箱18呈“田”字型布设。底座1上端面、位于四个收纳箱18中心位置焊接固定有传动件安装座12,传动件安装座12内竖直设置有第一螺杆10,该第一螺杆10两端分别与传动件安装座12和底座1转动连接。底座1上端面右侧焊接有l型扶手架2。
28.收纳箱18包括焊接固定在底座1上的箱体1802,箱体1802内自下而上依次设有底板1805、弹性伸缩管1804和置物板1803,弹性伸缩管1804连接底板1805和置物板1803。弹性伸缩管1804的数量为多个,在底板1805和置物板1803之间均匀分布。箱体1802内壁四周均设有气囊1807,气囊1807通过输气管1806与底板1805相连。底板1805中开设的气道连通弹性伸缩管1804、输气管1806及气囊1807,气囊1807的材质为橡胶。箱体1802顶部通过横向插接防护盖板1801封闭,防护盖板1801带有坡面,用以在插接时推动危险品箱体及置物板1803向下移动。
29.四个收纳箱18上的防护盖板插接口均朝向外侧。同侧收纳箱18的防护盖板1801焊接固定在衔接板17上,衔接板17内侧焊接固定有内螺纹套管16,内螺纹套管16中螺纹连接有第二螺杆15,第二螺杆15水平转动连接在传动件安装座12上,第二螺杆15端部焊接固定有第二锥齿轮14,第一螺杆10上焊接固定有第一锥齿轮13,第一锥齿轮13分别与两个第二锥齿轮14在传动件安装座12中相啮合。底座1底部四角位置焊接固定有支腿21。
30.第一螺杆10通过设置在转运设备上的驱动机构驱转。具体地,驱动机构包括手拉杆4、锁定机构6、牵拉绳7、线盘9和弹簧盒19。在l型扶手架2的把手位置开设有方孔,方孔两侧开设有导轨槽3,手拉杆4可横向移动地设置在方孔两侧的导轨槽3中。线盘9固定在第一螺杆10底部伸出底座1的一端,底座1底部右侧固定有滑轮8,底座1和l型扶手架2上开设有穿线孔,牵拉绳7一端绕接在线盘9上,另一端绕过滑轮8,穿过穿线孔后与手拉杆4相连。弹簧盒19焊接固定在底座1底部中间位置,弹簧盒19内设置有涡卷弹簧20,涡卷弹簧20内端与第一螺杆10焊接相连。
31.锁定机构6的数量为两个,两个导轨槽3中各设有一个。锁定机构6包括焊接固定在导轨槽3侧壁的第一杆件603,第一杆件603上通过橡胶连接件606连接有第二杆件605,橡胶连接件606与第一、第二杆件通过螺钉固定。此外,第一杆件603上还焊接固定有导向件604,该导向件604为片状结构,其上开设有腰型孔,第二杆件605上设有圆柱凸起,与腰型孔配合,限制第二杆件605滑动。在手拉杆4的端部开槽,槽内焊接固定有第二弹簧601,第二弹簧601另一端焊接固定有顶杆602。顶杆602、第一杆件603和第二杆件605各自的端部设有斜面,其中第一、第二杆件的斜面朝外,顶杆602的斜面与第一杆件603的斜面平行。手拉杆4上焊接固定有第一弹簧5,第一弹簧5另一端与l型扶手架2焊接相连。本实施例中,第一弹簧5的数量为两个。
32.底座1上设有滚轮机构11。滚轮机构11包括滚轮安装板1101,滚轮安装板1101上设置万向轮1104。万向轮1104上设有阻尼筒1102和减震弹簧1103。底座1内开设有腔体,滚轮安装板1101设置在腔体中,滚轮安装板1101螺纹连接在第一螺杆10上。当第一螺杆10转动时,滚轮安装板1101在腔体中上下移动,使万向轮1104伸出或收回底座1。底座1上开设有供万向轮1104伸出或缩回的孔洞。万向轮1104完全伸出时,高出支腿21。本实施例中,万向轮
1104的数量为四个。
33.本发明的使用方法为:
34.将需要转运的危险品箱体逐个放置在不同的收纳箱18中,危险品箱体基于自身重力,带动置物板1803向下移动。向右拉动手拉杆4,过程中,顶杆602首先移动到第一杆件603左侧,在第一杆件603斜面的引导下,顶杆602回缩,在手拉杆4继续向右移动过程中,顶杆602伸出并插入到第一、第二杆件之间,实现锁定。在手拉杆4向右移动的同时,牵拉绳7带动线盘9及第一螺杆10转动,进而带动两根第二螺杆15转动,使衔接板17及其上的防护盖板1801向内侧移动,防护盖板1801插入箱体1802中,使危险品箱体及置物板1803继续下移。置物板180向下移动过程中,挤压弹性伸缩管1804,使得弹性伸缩管1804内的气体进入气囊1807,经充气的气囊1807包裹防护危险品箱体。在第一螺杆10转动的同时,带动滚轮安装板1101向下移动。在防护盖板1801关闭时,手拉杆4被锁定,同时滚轮安装板1101上的万向轮1104伸出,方便通过l型扶手架2推运该危险品转运设备
35.当转运到位后,继续向右拉动手拉杆4,带动顶杆602向第二杆件605移动。利用顶杆602的斜面,在第二杆件605的作用下,顶杆602再次回缩,而后移动到第二杆件605右侧。松开手拉杆4,手拉杆4由被压缩的第一弹簧5驱动,在顶杆602平面的推动作用下,第二杆件605在导向件604中向左移动并贴靠第一杆件603,而后在第二杆件605斜面的引导下,顶杆602又一次回缩,而后移动到第一杆件603左侧,实现手拉杆4的释放。接着,涡卷弹簧20带动第一螺杆10反向转动,过程中线盘9对牵拉绳7进行收卷,滚轮安装板1101向上移动,收回万向轮1104。同时通过第二螺杆15带动各防护盖板1801向外移动脱离箱体1802,方便取出危险品箱体。当危险品箱体取出后,弹性伸缩管1804和气囊1807使置物板1803复位。
36.参阅图9,本发明还提供了利用无人机来转运的方案,需要在底座1上端面左侧再焊接一个l型扶手架2。转动时,通过无人机底部的夹持机构抓住两个l型扶手架2,即可实现空中转运。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。