1.本发明属于航空发动机控制技术领域,具体涉及一种基于变换函数的航空发动机输入饱和鲁棒控制方法。
背景技术:
2.航空发动机工作过程受各种约束的限制,包括机械约束如转速,热动约束如压强及温度,安全稳定工作过程约束如喘振裕度、燃烧室熄火限制等。航空发动机控制主要包含稳态控制(也叫设计点控制)、过渡过程控制和安全限制保护控制,使得航空发动机在各种飞行条件及工作状态下,能够最大限度地发挥其作为动力装置的潜力,在加减速的过渡态过程中,能够快速响应,并保证各种安全边界均不被破坏。
3.由于控制系统会受到外界扰动的影响,被控对象具有物理局限性,亦或是出于系统安全以及环境保护等因素的考虑,实际控制系统不可避免地受到一些约束的限制。对于航空发动机这样强非线性、工作点大范围变化的复杂系统而言,基于物理条件限制和节能考虑,航空发动机油泵中燃油供油量受到限制、尾喷口面积的变化只能在有限范围内,这也意味着现代航空发动机控制是典型输入受到饱和约束的控制问题。
4.当输入饱和现象发生时,如果不对控制器重新设计,而忽略饱和,那么就会出现控制器的输入和输出不匹配。系统无法得到正确的反馈,则系统内部会出现混乱,从而使得系统性能的大幅度下降。而对于航空发动机这样控制要求苛刻的系统而言,则有可能造成系统的失稳,严重时可能造成系统的崩溃。因此,本发明提出一种基于变换函数的航空发动机输入饱和鲁棒控制方法。
技术实现要素:
5.发明目的:为解决航空发动机不确定非线性系统中存在输入饱和以及未知有界外部扰动造成的控制效果减弱甚至闭环系统不稳定的问题,本发明提出一种基于变换函数的航空发动机输入饱和鲁棒控制方法。通过引入限幅函数近似饱和从而使饱和约束模型连续可微。针对近似误差、外部扰动和饱和约束模型引起的非线性,基于拉格朗日乘子法提出一种连续鲁棒控制器使得不确定系统实现一致有界和一致最终有界。
6.技术方案:为实现上述目的,本发明采用的技术方案为:
7.一种基于变换函数的航空发动机输入饱和鲁棒控制方法,包括以下步骤:
8.步骤1),建立含噪声及饱和输入限制的不确定非线性系统,并利用双曲正切函数近似饱和约束模型;
9.步骤2),计算非线性系统中不确定性的界值;
10.步骤3),设计鲁棒控制器;
11.步骤4),验证系统全局一致有界性。
12.进一步的,所述步骤1)中的具体步骤如下:
13.步骤1.1),考虑一类含噪声及饱和输入限制的不确定非线性系统
[0014][0015]
其中,x(t)=[x1(t),
…
,xn(t)]
t
表示状态,u(v(t))=[u1(t),
…
,um(t)]
t
表示受到饱和限制的输入,v(t)=[v1(t),v2(t),
…
,vm(t)]
t
表示控制,g(t)=[g1(t),
…
,g
p
(t)]
t
表示噪声,为已知常数矩阵,n、m和p分别表示状态、输入和噪声的维度;
[0016]
步骤1.2),构建航空发动机状态空间模型,并基于航空发动机的部件级模型,通过小扰动法分别获取系统(1)的系数矩阵a,b和b0;
[0017]
步骤1.3),针对饱和输入模型
[0018][0019]
其中,um=[u
1m
,
…
,u
mm
]
t
表示输入的饱和界值。利用双曲正切函数的值域特性,设计光滑函数h(v(t))近似饱和函数,即:
[0020]
h(v)=[h1(v),h2(v),
…
,hn(v)]
t
ꢀꢀꢀ
(3)
[0021][0022]
令d(v)为由于近似引起的误差,且
[0023]
d(v):=sat(v)-h(v)=[d1(v),d2(v),
…
,dn(v)]
t
ꢀꢀꢀ
(5)
[0024]
则饱和函数可表示为u(v)=h(v) d(v),系统(1)可写成
[0025][0026]
进一步的,所述步骤2)中的具体步骤如下:
[0027]
步骤2.1),令对角矩阵矩阵和向量分别为
[0028][0029]
则系统(6)可表示成
[0030][0031]
步骤2.2),令矩阵使得其满足匹配条件定义系统中存在的不确定性的集总为
[0032]
k(t):=l-1
d(v) eg(t)
ꢀꢀꢀ
(9)
[0033]
则可将系统(8)写成
[0034][0035]
步骤2.3),证明系统不确定性k(t)存在界值,并定义其界值为ρ(t)。
[0036]
进一步的,所述步骤2.3)中的具体步骤如下:
[0037]
步骤2.3.1),针对(5)中定义的相似误差可得
[0038]
|d(vi)|=|sat(vi)-h(vi)|≤|sat(v
i*
)-h(v
*i
)|=diꢀꢀꢀ
(11)
[0039][0040]
当0≤|vi|≤u
im
时,随着|vi|从0增加至v
i*
,|d(vi)|从0增加到di,随着|vi|从v
i*
增加至u
im
,|d(vi)|从di减小至|d(u
im
)|;当|vi|>u
im
时,|d(vi)|随着|vi|增加从|d(u
im
)|减小至0;令
[0041]dmax
=max(d1,d2,
…dm
)
ꢀꢀꢀ
(13)
[0042]
则可得相似误差存在最大值,且
[0043]
||d(v)||≤d
max
ꢀꢀꢀ
(14)
[0044]
步骤2.3.2),令ρg(t)=||g(t)||,ρ
gmax
=||g(t)||
max
结合(9)和(17)可得不确定性k(t)的上界
[0045]
k(t)≤||l-1
||d
max
||e||ρg(t)=ρ(t)
ꢀꢀꢀ
(15)
[0046]
且其中为给定正常数。
[0047]
进一步的,所述步骤3)中的具体步骤如下:
[0048]
步骤3.1),设计连续函数γ(
·
):当时,对任意满足
[0049]
γ(||v||)≤v
t
φ(v)
ꢀꢀꢀ
(16)
[0050]
设计连续函数ψ(
·
):当时,对任意满足
[0051][0052]
步骤3.2),设计控制器v(t)=p(x(t),t),其中p(x,t)是carathedory函数,且p(
·
):对给定正常数ε,使得
[0053][0054]
其中,μ(x,t):=α(x,t)ρ(t),v(x,t)为lyapunov方程,且v
(
·
):
[0055]
进一步的,所述步骤3.1)中的具体步骤如下:
[0056]
步骤3.1.1),选择状态变量为低压转子转速n
l
和高压转子转速nh,控制变量为主燃烧室燃油流量wf和尾喷管喉道面积a8,则系统(1)中m=n=p=2,有
[0057][0058]
结合(11)和(19)可得
[0059]
γ(||v||)≤v
1 tanh(v1) v
2 tanh(v2)
ꢀꢀꢀ
(20)
[0060]
其中将(20)转换为条件极值问题,即令
[0061]
θ(v1,v2):=v
1 tanh(v1) v
2 tanh(v2)
ꢀꢀꢀ
(21)
[0062]
对任意ξ≥0,求解对所有v1和v2满足的θ(v1,v2)的最小值;由此,对任意v1和v2,求解获得满足γ(ξ)=min{θ(v1,v2)|ξ=||v||}的γ(ξ);
[0063]
步骤3.1.2),采用lagrange乘子法对步骤3.1.1)中条件极值问题求解,令
[0064][0065]
其中λ是拉格朗日乘子;对式(22)求偏导数可得
[0066][0067]
求解方程组(23),可得优化问题的解为将和带入(22)中,可得θ(v1,v2)的最小值为进而
[0068][0069]
步骤3.1.3),结合(24)和(12)可获得ψ(
·
),即
[0070][0071]
进一步的,所述步骤4)中的具体步骤如下:
[0072]
步骤4.1),针对自治系统
[0073][0074]
存在lyapunov函数v(x,t)和正常数λ1,使得
[0075][0076]
步骤4.2),对系统的lyapunov方程求导,可得
[0077][0078]
当||μ||>ε时,取τ=ψ(ρ)ρ/||μ||,p(x,t)=-τα,结合(11)可得
[0079][0080]
α≠0且p(x,t)≠0;结合(28)可得
[0081][0082]
当||μ||≤ε时,若α≠0且p(x,t)≠0,结合(13)和(11)可得
[0083][0084][0085]
结合(11)可得
[0086][0087]
若p(x,t)=0,则可得α
t
φ(p(x,t))=0,
[0088][0089]
若α=0,则可得α
t
φ(p(x,t))=α
t
k(t)=0,
[0090][0091]
综上,结合(30)、(33)、(34)和(35)可得,对任意皆有
[0092][0093]
因此,当||x||足够大时,为必为负;
[0094]
步骤4.3),结合(36)易证其最终有界和一直最终有界。
[0095]
本发明的有益效果为:
[0096]
(1)现有基于函数变换的技术方法多对系统的形式有特殊的要求,难以用于航空发动机中,而本文提出的鲁棒控制适用于航空发动机这类不确定性系统,弥补了技术空缺;
[0097]
(2)充分利用双曲正切函数对于噪声的滤波特点;
[0098]
(3)同时解决了航空发动机中存在饱和非线性和噪声非线性的问题,并且具有通用性,有助于解决工程、社会中的其他饱和非线性问题。
附图说明
[0099]
图1本发明方法流程示意图。
[0100]
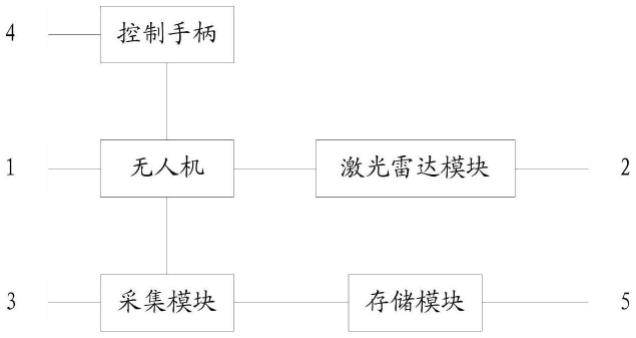
图2为本发明控制系统结构示意图。
[0101]
图3为限幅函数与饱和函数近似性示意图。
[0102]
图4为本发明中航空发动机结构与截面标识示意图。
[0103]
图5为本发明控制方法与lqr控制方法x1响应结果比较示意图。
[0104]
图6为本发明控制方法与lqr控制方法x2响应结果比较示意图。
[0105]
图7为本发明控制方法与lqr控制方法u1响应结果比较示意图。
[0106]
图8为本发明控制方法与lqr控制方法u2响应结果比较示意图。
具体实施方式
[0107]
本发明公开了一种基于变换函数的航空发动机输入饱和鲁棒控制方法,包括以下步骤:步骤1)、建立含噪声及饱和输入限制的不确定非线性系统,并利用双曲正切函数近似饱和约束模型;步骤2)、计算非线性系统中不确定性的界值;步骤3)、设计鲁棒控制器;步骤4)、验证系统全局一致有界性。本发明将突变的饱和约束模型变换为连续可微的限幅模型,再通过拉格朗日乘子法设计控制器,有效解决航空发动机非线性系统中因同时存在输入饱和以及未知有界外部扰动等不确定性造成控制效果减弱甚至闭环系统不稳定的问题。
[0108]
一种基于变换函数的航空发动机输入饱和鲁棒控制方法,如图1示,包括以下步骤:
[0109]
步骤1),利用双曲正切函数近似饱和约束模型;
[0110]
步骤1.1),考虑一类含噪声及饱和输入限制的不确定非线性系统
[0111][0112]
其中,x(t)=[x1(t),
…
,xn(t)]
t
表示状态,u(v(t))=[u1(t),
…
,um(t)]
t
表示受到饱和限制的输入,v(t)=[v1(t),v2(t),
…
,vm(t)]
t
表示控制,g(t)=[g1(t),
…
,g
p
(t)]
t
表示噪声,为已知常数矩阵,n、m和p分别表示状态、输入和噪声的维度;
[0113]
步骤1.2),构建航空发动机状态空间模型,并基于航空发动机的部件级模型,通过小扰动法分别获取系统(1)的系数矩阵a,b和b0;
[0114]
步骤1.3),针对饱和输入模型
[0115][0116]
其中,um=[u
1m
,
…
,u
mm
]
t
表示输入的饱和界值。利用双曲正切函数的值域特性,设计光滑函数h(v(t))近似饱和函数,即:
[0117]
h(v)=[h1(v),h2(v),
…
,hn(v)]
t
ꢀꢀꢀ
(3)
[0118][0119]
令d(v)为由于近似引起的误差,且
[0120]
d(v):=sat(v)-h(v)=[d1(v),d2(v),
…
,dn(v)]
t
ꢀꢀꢀ
(5)
[0121]
则饱和函数可表示为u(v)=h(v) d(v),系统(1)可写成
[0122][0123]
步骤2),计算非线性系统中不确定性的界值;
[0124]
步骤2.1),令对角矩阵矩阵和向量分别为
[0125][0126]
则系统(6)可表示成
[0127][0128]
步骤2.2),令矩阵使得其满足匹配条件定义系统中存在的不确定性的集总为
[0129]
k(t):=l-1
d(v) eg(t)
ꢀꢀꢀ
(9)
[0130]
则可将系统(8)写成
[0131][0132]
步骤2.3),证明系统不确定性k(t)存在界值,并定义其界值为ρ(t);
[0133]
步骤2.3.1),针对(5)中定义的相似误差可得
[0134]
|d(vi)|=|sat(vi)-h(vi)|≤|sat(v
i*
)-h(v
*i
)|=diꢀꢀꢀ
(11)
[0135][0136]
当0≤|vi|≤u
im
时,随着|vi|从0增加至v
i*
,|d(vi)|从0增加到di,随着|vi|从v
i*
增加至u
im
,|d(vi)|从di减小至|d(u
im
)|;当|vi|>u
im
时,|d(vi)|随着|vi|增加从|d(u
im
)|减小至0;令
[0137]dmax
=max(d1,d2,
…dm
)
ꢀꢀꢀ
(13)
[0138]
则可得相似误差存在最大值,且
[0139]
||d(v)||≤d
max
ꢀꢀꢀ
(14)
[0140]
步骤2.3.2),令ρg(t)=||g(t)||,ρ
gmax
=||g(t)||
max
结合(9)和(17)可得不确定性k(t)的上界
[0141]
k(t)≤||l-1
||d
max
||e||ρg(t)=ρ(t)
ꢀꢀꢀ
(15)
[0142]
且其中为给定正常数;
[0143]
步骤3),设计鲁棒控制器;
[0144]
步骤3.1),设计连续函数γ(
·
):当时,对任意满足
[0145]
γ(||v||)≤v
t
φ(v)
ꢀꢀꢀ
(16)
[0146]
设计连续函数ψ(
·
):当时,对任意满足
[0147][0148]
步骤3.1.1),选择状态变量为低压转子转速n
l
和高压转子转速nh,控制变量为主燃烧室燃油流量wf和尾喷管喉道面积a8,系统(1)中m=n=p=2,有
[0149][0150]
结合(11)和(19)可得
[0151]
γ(||v||)≤v
1 tanh(v1) v
2 tanh(v2)
ꢀꢀꢀ
(19)
[0152]
其中从而可将(19)转换为条件极值问题,即令
[0153]
θ(v1,v2):=v
1 tanh(v1) v
2 tanh(v2)
ꢀꢀꢀ
(20)
[0154]
对任意ξ≥0,求解对所有v1和v2满足的θ(v1,v2)的最小值。由此,对任意v1和v2,求解获得满足γ(ξ)=min{θ(v1,v2)|ξ=||v||}的γ(ξ);
[0155]
步骤3.1.2),采用lagrange乘子法对步骤3.1.1)中条件极值问题求解,令
[0156][0157]
其中λ是拉格朗日乘子;对式(21)求偏导数可得
[0158][0159]
求解方程组(22),可得优化问题的解为将和带入(21)中,可得θ(v1,v2)的最小值为进而
[0160][0161]
步骤3.1.3),结合(12)和(23)可获得ψ(
·
),即
[0162][0163]
步骤3.2),设计控制器v(t)=p(x(t),t),其中p(x,t)是carathedory函数,且p(
·
):对给定正常数ε,使得
[0164][0165]
其中,μ(x,t):=α(x,t)ρ(t),v(x,t)为lyapunov方程,且v(
·
):
[0166]
步骤4),验证系统全局一致有界性;
[0167]
步骤4.1),针对自治系统
[0168][0169]
存在lyapunov函数v(x,t)和正常数λ1,使得
[0170]
[0171]
步骤4.2),对系统的lyapunov方程求导,可得
[0172][0173]
当||μ||>ε时,取τ=ψ(ρ)ρ/||μ||,p(x,t)=-τα,结合(11)可得
[0174][0175]
α≠0且p(x,t)≠0。结合(28)可得
[0176][0177]
当||μ||≤ε时,若α≠0且p(x,t)≠0,结合(13)和(11)可得
[0178][0179][0180]
结合(11)可得
[0181][0182]
若p(x,t)=0,则可得α
t
φ(p(x,t))=0,
[0183][0184]
若α=0,则可得α
t
φ(p(x,t))=α
t
k(t)=0,
[0185][0186]
综上,结合(30)、(33)、(34)和(35)可得,对任意皆有
[0187][0188]
因此,当||x||足够大时,为必为负;
[0189]
步骤4.3),结合(36)易证其最终有界和一直最终有界。
[0190]
实施例
[0191]
下面结合附图和实施例对本发明作进一步说明。
[0192]
根据下述实施例,可以更好的理解本发明。然而,本领域的技术人员容易理解,实施例所描述的具体的物料配比、工艺条件及其结果仅用于说明本发明,而不应当也不会限制权利要求书中所详细描述的本发明。
[0193]
以图4中某型涡扇发动机为例,基于涡扇发动机气动热力学的部件级模型,选择状态变量为低压转子转速n
l
和高压转子转速nh,控制变量为主燃烧室燃油流量wf和尾喷管喉道面积a8,建立其在高度h=0km,马赫数ma=0.3工作状态点的状态空间模型,获得的系数矩阵为:
[0194][0195]
则状态空间模型为
[0196][0197]
其中,g(t)为噪声,且ρg(t)=||g(t)||≤0.015。选取ε=0.01,控制的界值分别为u
1m
=1.5,u
2m
=1.2。结合图3中限幅函数和饱和函数模型的相似性,可求得d
max
=0.2075,
[0198][0199]
图5-图8展示了在对系统施加[0.02 0.02]
t
的初始扰动后,状态变量和控制变量的响应曲线,并选择传统的lqr控制器与本发明所设计控制器进行比较。仿真结果表明,当系统受到干扰时,本发明所设计的控制器能够使系统回到稳态,并且其控制变量满足约束要求(图中轻微震荡是由于噪声引起的)。与传统lqr控制相比,两个控制方法均能使系统在0.2秒内回到稳态,但是在lqr控制中u1的最小值小于-1.5,即超过约束边界。因此,可得出结论:对于存在输入饱和不确定性的航空发动机非线性系统,本发明设计的控制器性能优于传统lqr控制器的性能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。