1.本发明属于卫星测距领域,具体涉及一种基于伪距约束的载波相位的测距方法。
背景技术:
2.高精度卫星定位、导航和授时(positioning,navigation and timing,pnt)应用的前提是卫星具备高精度的测距技术,高精度的卫星测距技术是衡量卫星导航系统性能优劣的重要标志。
3.gnss(global navigation satellite system,全球卫星导航系统)领域主要采用的是伪距和载波相位测距技术,伪距测距精度约为30cm,载波相位测距精度可以优于1cm。
4.由于伪距测距精度约为30cm难以满足高精度应用,而载波相位测距达虽然可以达到更高精度,但是在载波相位测距过程中,接收机接到的载波相位观测值包含一部分未知的模糊度参数、整周数和不足一周的小数部分,小数部分可以精确确定,模糊度参数和整周数在一起难以分离,无法估计出准确的整周数,从而无法获得高精度的测距结果。如果长时间观测联合求解解决模糊度参数进而获得精确的整周数,该过程耗时过长精度度随之降低,因此现有技术中模糊度的错误估计将导致载波相位的测距精度较差。
技术实现要素:
5.为了解决现有技术中存在的上述问题,本发明提供了一种基于伪距约束的载波相位星地测距方法。本发明要解决的技术问题通过以下技术方案实现:
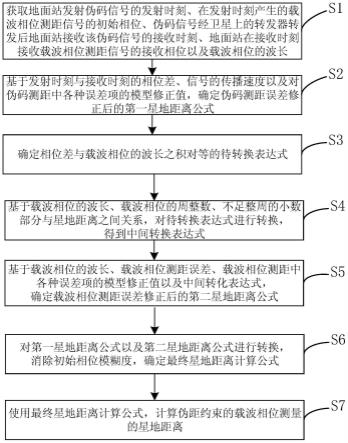
6.本发明提供的一种基于伪距约束的载波相位的测距方法包括:
7.获取地面站发射伪码信号的发射时刻、在所述发射时刻产生的载波相位测距信号的初始相位、所述伪码信号经卫星上的转发器转发后地面站接收该伪码信号的接收时刻、地面站在接收时刻接收载波相位测距信号的接收相位以及载波相位的波长;
8.基于所述发射时刻与所述接收时刻的相位差、所述信号的传播速度以及对伪码测距中各种误差项的模型修正值,确定伪码测距误差修正后的第一星地距离公式;
9.确定所述相位差与载波相位的波长之积对等的待转换表达式;
10.其中,待转换表达式包括载波相位的周整数、不足整周的小数部分与初始相位模糊度之和,与所述载波相位的波长的乘积;
11.基于载波相位的波长、载波相位的周整数、不足整周的小数部分与星地距离之间关系,对所述待转换表达式进行转换,得到中间转换表达式;
12.基于所述载波相位的波长、载波相位测距误差、载波相位测距中各种误差项的模型修正值以及所述中间转化表达式,确定载波相位测距误差修正后的第二星地距离公式;
13.对所述第一星地距离公式以及第二星地距离公式进行转换,消除初始相位模糊度,确定最终星地距离计算公式;
14.使用最终星地距离计算公式,计算伪距约束的载波相位测量的星地距离;
15.其中,所述最终星地距离计算公式为:
[0016][0017]
其中,λ表示载波相位的波长,d表示不足整周的小数部分,表示测距误差的小数部分,表示的整数部分,δρ2表示载波相位的测距误差,δρ4表示对载波相位测距中各种误差项的模型修正值,d1表示第一星地距离。
[0018]
可选的,所述第一星地距离计算公式为:
[0019][0020]
其中,d1表示第一星地距离,δρ3对伪码测距中各种误差项的模型修正值,t2表示接受时刻,t1表示发射时刻,c表示信号的传播速度。
[0021]
可选的,所述待转换表达式为:
[0022][0023]
其中,表示初始相位,表示接收相位,n表示整周数,nb为初始相位模糊度。
[0024]
可选的,所述中间转换表达式为:
[0025][0026]
其中,表示初始相位,表示接收相位,n表示整周数,nb为初始相位模糊度。
[0027]
可选的,所述第二星地距离公式为:
[0028][0029]
其中,d2表示第二星地距离,n表示整周数,nb为初始相位模糊度。
[0030]
可选的,对所述第一星地距离公式以及第二星地距离公式进行转换,消除初始相位模糊度,确定最终星地距离计算公式的步骤包括:
[0031]
基于所述第一星地距离公式以及伪码测距过程中载波信号的波长、整数周以及初始星地距离之间的关系,确定第二星地距离公式中的整周数;
[0032]
所述整周数为:
[0033]
基于所述整周数、第一星地距离公式对所述第二星地距离公式进行转换,消除所述初始相位模糊度,得到最终星地距离计算公式;
[0034]
其中,初始星地距离为:2ρ=λ
·
(n d)
[0035]c·
(t
2-t1)=2ρ δρ1[0036]
其中,ρ表示初始星地距离,t1表示发射时刻,t2表示接收时刻,n表示整周数,δρ1表示伪码测距误差。
[0037]
本发明提出了一种基于伪距约束的载波相位的测距方法,计算载波相位的整周部
分,并结合载波相位测距的小数部分,提出新型的测量星地距离的方案。相比于现有技术本发明无需计算模糊度参数,通过伪距测距以及载波测距的相互结合,并对初始星地距离中的误差进行修正,得到中间转换表达式,基于载波相位的波长、载波相位测距误差、载波相位测距中各种误差项的模型修正值以及中间转化表达式,确定载波相位测距误差修正后的第二星地距离公式;对第一星地距离公式以及第二星地距离公式进行转换,消除初始相位模糊度,确定最终星地距离计算公式,以此计算伪距约束的载波相位测量的星地距离。因此本发明可以提高载波相位星地测距精度。
[0038]
以下将结合附图及实施例对本发明做进一步详细说明。
附图说明
[0039]
图1是本发明实施例提供的一种基于伪距约束的载波相位的测距方法的流程图;
[0040]
图2是本发明实施例提供的伪码约束的载波相位测距原理图;
[0041]
图3是本发明实施例提供的伪码约束的载波相位误差修正的过程示意图。
具体实施方式
[0042]
下面结合具体实施例对本发明做进一步详细的描述,但本发明的实施方式不限于此。
[0043]
如图1所示,本发明提供的一种基于伪距约束的载波相位的测距方法包括:
[0044]
s1,获取地面站发射伪码信号的发射时刻、在发射时刻产生的载波相位测距信号的初始相位、伪码信号经卫星上的转发器转发后地面站接收该伪码信号的接收时刻、地面站在接收时刻接收载波相位测距信号的接收相位以及载波相位的波长;
[0045]
其中,载波相位的波长在发射信号之前已预先设置,在传输过程中载波相位的波长不发生变化。
[0046]
s2,基于发射时刻与接收时刻的相位差、信号的传播速度以及对伪码测距中各种误差项的模型修正值,确定伪码测距误差修正后的第一星地距离公式;
[0047]
s3,确定相位差与载波相位的波长之积对等的待转换表达式;
[0048]
其中,待转换表达式包括载波相位的周整数、不足整周的小数部分与初始相位模糊度之和,与载波相位的波长的乘积;
[0049]
s4,基于载波相位的波长、载波相位的周整数、不足整周的小数部分与星地距离之间关系,对待转换表达式进行转换,得到中间转换表达式;
[0050]
s5,基于载波相位的波长、载波相位测距误差、载波相位测距中各种误差项的模型修正值以及中间转化表达式,确定载波相位测距误差修正后的第二星地距离公式;
[0051]
s6,对第一星地距离公式以及第二星地距离公式进行转换,消除初始相位模糊度,确定最终星地距离计算公式;
[0052]
s7,使用最终星地距离计算公式,计算伪距约束的载波相位测量的星地距离;
[0053]
其中,最终星地距离计算公式为:
[0054]
[0055]
其中,λ表示载波相位的波长,d表示不足整周的小数部分,表示测距误差的小数部分,表示的整数部分,δρ2表示载波相位的测距误差,δρ4表示对载波相位测距中各种误差项的模型修正值,d1表示第一星地距离。
[0056]
本发明提出了一种基于伪距约束的载波相位的测距方法,计算载波相位的整周部分,并结合载波相位测距的小数部分,提出新型的测量星地距离的方案。相比于现有技术本发明无需计算模糊度参数,通过伪距测距以及载波测距的相互结合,并对初始星地距离中的误差进行修正,得到中间转换表达式,基于载波相位的波长、载波相位测距误差、载波相位测距中各种误差项的模型修正值以及中间转化表达式,确定载波相位测距误差修正后的第二星地距离公式;对第一星地距离公式以及第二星地距离公式进行转换,消除初始相位模糊度,确定最终星地距离计算公式,以此计算伪距约束的载波相位测量的星地距离。因此本发明可以提高载波相位星地测距精度。
[0057]
其中,第一星地距离计算公式为:
[0058][0059]
其中,d1表示第一星地距离,δρ3对伪码测距中各种误差项的模型修正值,t2表示接受时刻,t1表示发射时刻,c表示信号的传播速度。
[0060]
其中,待转换表达式为:
[0061][0062]
其中,表示初始相位,表示接收相位,n表示整周数,nb为初始相位模糊度。
[0063]
其中,中间转换表达式为:
[0064][0065]
其中,表示初始相位,表示接收相位,n表示整周数,nb为初始相位模糊度。
[0066]
其中,所述第二星地距离公式为:
[0067][0068]
其中,d2表示第二星地距离,n表示整周数,nb为初始相位模糊度。作为可选的一种实施方式,对所述第一星地距离公式以及第二星地距离公式进行转换,消除初始相位模糊度,确定最终星地距离计算公式的步骤包括:
[0069]
基于所述第一星地距离公式以及伪码测距过程中载波信号的波长、整数周以及初始星地距离之间的关系,确定第二星地距离公式中的整周数;
[0070]
所述整周数为:
[0071]
基于所述整周数、第一星地距离公式对所述第二星地距离公式进行转换,消除所
述初始相位模糊度,得到最终星地距离计算公式;
[0072]
其中,初始星地距离为:2ρ=λ
·
(n d)
[0073]c·
(t
2-t1)=2ρ δρ1[0074]
其中,ρ表示初始星地距离,t1表示发射时刻,t2表示接收时刻,n表示整周数,δρ1表示伪码测距误差。
[0075]
对于转发式测距技术而言,测量信号发射时刻与接收时刻的原子钟是同一颗卫星上的原子钟,所以测量得到的观测值中不包含星钟与星钟之间的钟差引起的测距误差,但同时它所测得的是信号在星地的往返时间,所以得到的距离是星地距离的2倍。如图2所示,设地面站发射伪码信号的时刻为t1,经b星上的转发器转发后,地面站在t2时刻收到信号,则:
[0076]c·
(t
2-t1)=2ρ δρ1ꢀꢀꢀ
(1)
[0077]
其中,ρ表示星地几何距离,δρ1表示伪码测距误差,在后面会对这里面的误差项进行详细分析。
[0078]
同时,假设地面站在t1时刻产生的载波相位测距信号初相为在传播了ρ的距离后到卫星b上的转发器转发后再传播了距离ρ至地面站接收部分接收,此时相位为对应的相位变化为而里包含了整周数、整周模糊度以及不足整周的小数部分。因此有:
[0079][0080]
其中,λ表示载波相位的波长,n表示整周数,nb为初始相位模糊度;d表示不足整周的小数部分,δρ2表示载波相位测距误差。且有:
[0081]
2ρ=λ
·
(n d)
ꢀꢀꢀ
(3)
[0082]
将公式(3)进行变形,对δρ2与前项合并:
[0083][0084]
其中,表示的整数部分。
[0085]
在载波相位测距中,可以通过卫星观测直接得到的值其实是其中表示测距误差的小数部分,可以用现有技术中差拍法测量得到,且而n的大小无法确定。由于载波相位测距无法完成求解n,下述过程是利用伪距测距求解n。
[0086]
假设d1为对伪码测量结果进行误差模型改成后的第一星地距离值,d2表示对载波相位测量结果进行修正后的第二星地距离值,有:
[0087][0088][0089]
其中,公式(5)为第一星地距离公式,公式(6)为第二星地距离公式,δρ3表示对伪码测距中各种误差项的模型修正值,δρ4表示对载波相位测距中各种误差项的模型修正值。δρ3是通过模型求解的用于修正δρ1的值,δρ3≈δρ1,同理,δρ4≈δρ2。
[0090]
参考图3,在星地伪距和载波相位测量过程中,由于发射/接收设备的设备延迟、大气延迟、天线相位中心偏差、相位缠绕、相对位置关系偏差等等原因需要对测距结果进行修正,可以使用相对论效应改正模型对相对论误差进行修改,使用天线相位中心偏差改正模型对天线相位中心偏差进行修正,使用天线相位缠绕改正模型对相位缠绕造成的误差进行修正,使用电离层延迟改正模型对大气延迟造成的误差进行修正,对信号发射/接收设备进行延迟标定,以此修正设备误差。各项误差修正的总和确定为模型修正值。
[0091]
对于现有的伪码测距技术来说,|d
1-ρ|≤2cm,当使用l频段载波相位进行测距时,其波长有|d
1-ρ|≤λ,所以:
[0092][0093]
分别表示的整数部分,结合式(3),就有:
[0094][0095]
所以,有:
[0096][0097]
d为最终的星地距离。
[0098]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0099]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
