1.本实用新型涉及气象监测技术领域,尤其涉及一种气象监测激光器标准零点监测装置。
背景技术:
2.高海拔宇宙线观测站(lhaaso)是以宇宙线观测研究为核心的国家重大科技基础设施,其核心科学目标是研究银河系内外宇宙线的起源、加速和传播机制,黑洞、中子星等致密天体高能物理过程,暗物质粒子的寻找及新物理的发现。在对lhaaso-wfcta绝对定标和大气监测过程中,激光束稳定性、激光转动精度、慢控系统、望远镜等多个因素将综合影响标定结果。
3.而天气状况的监测则可以通过望远镜测量激光的散射光来监测大气分子对激光的散射情况,从而监测天气状况。每个激光器可以覆盖所有的望远镜,但由于lhaaso站点天气变化迅速,例如10分钟天气就可变化,同时为了获得足够多的激光事例,对于氮分子激光器,每次发射60个激光脉冲,对于yag激光器,每次发射30个激光脉冲。最后为了控制单个循环所需的发射时间,需要使用不同的激光器来覆盖不同的仰角。
4.由于激光转台长时间运行可能导致初始指向产生偏差,因此需要搭建一套标准零点监测系统来确定激光转台上标定的标准零点是否出现偏差,从而确保气象监测的准确性。
技术实现要素:
5.本实用新型的目的在于克服现有技术的不足,提供了一种气象监测激光器标准零点监测装置。
6.本实用新型的目的是通过以下技术方案来实现的:
7.一种气象监测激光器标准零点监测装置,包括激光器、激光转台、ccd相机和激光屏幕;所述激光器固定于激光转台上,所述激光屏幕设置于激光器射出光源方向的远处,其中内贴有坐标纸,用于对空间与像素之间的关系进行标定;所述ccd相机用于拍摄激光屏幕前形成的光斑,其镜头前放置有衰减片。
8.进一步的,所述激光器为氮分子激光器,用作光源。
9.进一步的,所述坐标纸有原始的标准零点位置。
10.进一步的,所述激光器出射激光的方向与坐标纸上原始的标准零点位置的方向一致。
11.进一步的,所述激光转台包括方位转台、俯仰转台和升降转台;从向至上依次为方位转台、升降转台以及俯仰转台;所述激光器设置于俯仰转台上。
12.进一步的,所述激光转台上设有升降机构、垂直转轴以及水平转轴;所述垂直转轴设置于方位转台中心;所述升降机构为液压式升降机,固定于方位转台与升降转台之间;所述水平转轴设置于俯仰转台。
13.进一步的,所述升降机构、垂直转轴以及水平转轴均为电动式设备。
14.进一步的,所述激光屏幕竖直安装,背朝正北方。
15.进一步的,还包括上位机,所述上位机为pc电脑,用于存储光斑数据。
16.本实用新型的有益效果:本实用新型通过采集激光光斑,通过长期监测光斑的位置与激光转台上标定原始的标准零点位置相比较,从而确定激光转台是否存在偏转。
附图说明
17.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
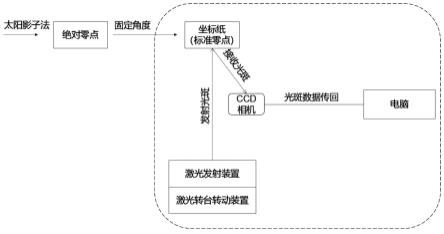
18.图1是本实用新型的装置原理图。
19.图2是激光转台立体结构示意图。
20.图3是激光转台某一视角示意图。
具体实施方式
21.应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.本实施例中,如图1所示,一种气象监测激光器标准零点监测装置,包括激光器、激光转台、ccd相机和激光屏幕;所述激光器固定于激光转台上,所述激光屏幕设置于激光器射出光源方向的远处,其中内贴有坐标纸,用于对空间与像素之间的关系进行标定;所述ccd相机用于拍摄激光屏幕前形成的光斑,其镜头前放置有衰减片;坐标纸竖直安装,背朝正北方。其中,坐标纸可采用一般的方格纸。
24.在本实施例中,激光器为氮分子激光器,用作光源。
25.在本实施例中,激光转台上标定有原始的标准零点位置。
26.在本实施例中,激光器出射激光的方向与坐标纸上标定有原始的标准零点位置的方向一致。
27.在本实施例中,还包括上位机,所述上位机为pc电脑,用于存储光斑数据。
28.在本实施例中,如图2和图3所示,激光转台包括方位转台、俯仰转台和升降转台;从向至上依次为方位转台、升降转台以及俯仰转台;所述激光器设置于俯仰转台上。
29.在本实施例中,激光转台上设有升降机构、垂直转轴以及水平转轴;所述垂直转轴设置于方位转台中心;所述升降机构为液压式升降机,固定于方位转台与升降转台之间;所述水平转轴设置于俯仰转台。
30.在本实施例中,所述升降机构、垂直转轴以及水平转轴均为电动式设备。
31.在本实施例中,激光转台的设计指标如下:
32.1. 升降机构:行程500 mm、中心承重100 kg、最大运动速度2 mm/s、减速比1:15、最小调整量0.75 μm、精度20 μm。
33.2. 水平旋转0-360度,中心承重50 kg、最大运动速度10
°
/s、减速比180:1、最小调整量0.01
°
、精度
±
15
″
。
34.3. 俯仰旋转-10-90度、中心承重45 kg、最大运动速度10
°
/s、减速比180:1、最小调整量0.01
°
、精度
±
15
″
。
35.在本实施例中,激光转台实现较高的转动精度的同时,还需要将激光转台的角度与地理角度对应。设定正北为激光出射方向的0
°
方位角,正东为90
°
方位角,水平方向为俯仰0
°
角;在激光转台的方位及俯仰均为零的地方标为绝对零点。在实验中通过太阳影子法确定。
36.在本实施例中,以氮分子激光器为光源发射激光,将激光投射至贴有坐标纸激光屏幕,形成光斑,再通过ccd相机拍摄激光屏幕相片,从而获得光斑图像,确定光斑的位置。由于激光屏幕贴有坐标纸,且激光光斑强度过高,因此,需要在ccd相机镜头前安装衰减片以过滤环境光和减弱激光光斑强度。
37.绝对零点可以通过太阳影子法来确定;不改变方位与俯仰角度下,通过升降至坐标纸上,确定为标准零点;激光转台在长时间运行后,其激光转台上的零度角与标准零点的误差是否在允许的范围内(即水平偏差角度
∆
α小于0.01
°
,且俯仰偏差角度
∆
β小于0.01
°
时,则认为该位置即是真实标准零点)。
38.本实用新型在使用时,通过太阳影子法获得绝对零点,从而固定激光屏幕,即坐标纸的安装角度;在激光转台初始标准状态下,水平俯仰则用高精度水平仪获得,激光器射出激光,获得标准零点在坐标纸上的位置;由于激光不适合用人眼去直接比较,因此再通过ccd相机采集光斑图像,通过比较坐标纸上标准零点的位置和后续激光到达坐标纸位置的偏差,即可确定激光转台角度是否存在偏转。
39.本文揭露的结构、功能和连接形式,可以通过其它方式实现。例如,以上所描述的实施例仅是示意性的,例如多个组件可以结合或者集成于另一个组件;另外,在本文各个实施例中的各功能组件可以集成在一个功能组件中,也可以是各个功能组件单独物理存在,也可以两个或两个以上功能组件集成为一个功能组件。
40.以上所述仅是本实用新型的优选实施方式,应当理解本实用新型并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本实用新型的精神和范围,则都应在本实用新型所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。