1.本实用新型涉及水面漂浮物及油污清理技术领域,具体而言,涉及一种水面油污清理机器人。
背景技术:
2.近年来,世界经济高速发展,随之而来的环境污染问题也愈发严重,人们逐渐意识到污染治理的重要意义。由于水是人类赖以生存的重要资源,因此对水资源的污染治理尤为重要,然而水污染的治理往往难度较高,却是人类必须面对的课题。
3.水体油类污染是水污染中最普遍、最严重的污染,其主要来源于油船的意外事故、海底采油、油船压舱水及炼油厂、石油化工厂废水中的油类对水体的污染,大量油污在水面形成油膜,不仅会影响水中氧气的补充和植物的光合作用,而且会对自然环境产生多种复杂的影响,比如破坏水体正常生态环境,威胁水生生物生命,影响人体健康等等。
4.水面油污清理难度较高,清理过程的安全性难以保证,现有采用机器人技术进行油污清理,但未能考虑水面上除油污外还存在泥沙、浮游生物等杂质,容易对机器产生不良影响,严重时堵塞水口,无法正常工作,降低清理效率,同时对杂质的及时清理也十分重要。
技术实现要素:
5.本实用新型旨在至少解决现有技术中存在水面油污清理装置难以处理水面杂质,无法对水面杂质及时进行清理,影响装置正常工作,降低了清理效率的技术问题之一。
6.本实用新型提供了一种水面油污清理机器人,包括可在水面漂浮前进的机器人本体,所述机器人本体设有收集装置和与收集装置连通的分离装置,所述收集装置至少可将机器人本体一侧的待清理液体吸取至分离装置内,所述分离装置和收集装置之间设有可拆除的过滤部,所述待清理液体经过过滤部进入分离装置,所述分离装置可将水油混合液体分离为水和油,并将水排回水面。
7.本实用新型提出的一种水面油污清理机器人,机器人本体可按照设定在水面上行进,漂浮于水面上,对水面上的油污进行清理,设于机器人本体的收集装置用于吸取机器人本体周围的待清理液体,待清理液体中包括水、油以及杂质,杂质多为浮游生物、泥沙、垃圾等;待清理液体经过过滤部,将杂质滤除,变为水油混合液体后进入分离装置,再由分离装置对水油混合液体进行分离,将其分离为水和油,将分离得到的水排出机器人本体外,排回水面。分离水油混合液体的原理采用水密度大于油密度的性质,即将水油混合液体充入分离装置后,液体将会产生分层,水将沉积在油液的下方,将位于下方的水排出,实现油污治理。其中,过滤部可拆除于机器人本体,方便对过滤部进行清理,避免杂质过多阻碍水油混合液体进入分离装置。
8.根据本实用新型上述技术方案的一种水面油污清理机器人,还可以具有以下附加技术特征:
9.在上述技术方案中,所述过滤部形成一杂质腔,所述杂质腔与收集装置连通,所述
杂质腔与分离装置之间通过滤网连通。
10.在该技术方案中,杂质腔用于存储杂质,收集装置收集的待清理液体进入杂质腔后,过滤网将杂质阻挡于杂质腔内,防止杂质进入分离装置,影响分离装置的正常工作,待清理液体经过过滤网变为水油混合液体,过滤网的密度可根据水域特征进行设置,此时杂质腔可分离于机器人本体,即将杂质腔及腔内杂质取出,不会产生残留杂质。
11.在上述技术方案中,所述过滤部与收集装置和/或分离装置可拆卸连接。
12.在该技术方案中,过滤部在收集装置和分离装置中任选其一进行可拆卸连接,或与两者同时可拆卸连接,均可实现杂质腔与两者的分离,从而进一步对杂质进行清理,如:仅与收集装置可拆卸连接时,过滤部为一网兜,网兜套设于收集装置的输出端,网兜内部为杂质腔,杂质腔内杂质较多时,将网兜从收集装置的输出端拆下,对网兜进行清理;可拆卸连接方式可选择螺纹连接、卡接、绑接等。
13.在上述技术方案中,所述过滤部还包括壳体,所述杂质腔形成于壳体内部,所述壳体设有进水口和出水口,所述进水口与收集装置连通,所述出水口与分离装置连通,所述滤网覆盖于出水口,所述壳体分别与收集装置和分离装置可拆卸连接。
14.在该技术方案中,壳体为过滤部提供刚性支撑,壳体靠近收集装置的一端设有进水口,壳体靠近分离装置一端设有出水口,待清理液体通过进水口进入杂质腔,水油混合液体通过覆盖于出水口的滤网进入分离装置。
15.在上述技术方案中,所述收集装置与进水口可拆卸连接,所述分离装置与出水口可拆卸连接。
16.在该技术方案中,收集装置通过水管与进水口螺纹连接,分离装置通过水管与出水口螺纹连接。
17.在上述技术方案中,所述分离装置包括若干分离舱,所述若干分离舱的底部相互连通。
18.在该技术方案中,水油混合液体在若干分离舱内进行重力分离,即使油处于分离舱的上部,水沉积于分离舱的下部;过滤部的出水口与靠近过滤部的分离舱底部连通,则经过重力分离,沉积于分离舱下部的水将会在各分离舱的底部流通,随着水油混合液体的输入,大部分的油液将留存于个分离舱的上部。
19.在上述技术方案中,所述若干分离舱中远离收集装置的分离舱底部连通有排水部,所述排水部包括排水泵和与排水泵连通的排水管,所述排水管位于分离舱内的管口靠近分离舱的底部。
20.在该技术方案中,通过排水部,将流通于各分离舱底部的水排出分离装置,排回水面,排水泵提供排水动力,排水管的管口尽量靠近分离舱的内腔底壁,保证输出液体绝大部分为水,但需留有一定空隙,保证液体的正常排出。
21.在上述任一技术方案中,所述分离装置设有控制单元,所述控制单元与水位传感器连接,所述水位传感器用于检测分离舱内液面高度,所述控制单元控制排水泵定时启闭,并根据分离舱内液面高度控制清污机器人是否返航。
22.在该技术方案中,收集装置收取一定量待清理液体进入分离装置,并经过一定时间的重力分离,控制单元开启排水泵,将水排出,在抽取量一定,重力分离时间一定时,采用定时开启排水泵的方法,可以实现分离装置内留存液体为绝大部分为油,当油液积累到一
定液面高度后,清污机器人返航到指定点清理分离装置内的油污,需要说明的是收集装置收取液体的量始终不会超过清污机器人触发返航的液面高度,从而保证足够的工作效率。
23.在上述任一技术方案中,所述分离装置设有控制单元,所述控制单元与水油分界面检测单元相连,所述水油分界面检测单元设于靠近分离装置的排水位置,所述控制单元根据水油分界面位置控制分离装置排水功能的启闭。
24.在该技术方案中,水油分界面检测单元为水油界面传感器,可判断分离装置内水和油的分界面,将水油界面传感器设于靠近排水管的管口位置,当分界面抵达管口位置附近时,停止排水,防止将收集的油污再次排回水面。
25.在上述任一技术方案中,所述收集装置包括吸油泵和与吸油泵连通的吸油管,所述吸油管与过滤部连通。
26.在该技术方案中,吸油管与过滤部可拆卸连接,待清理液体经过吸油管进入过滤部,吸油泵提供吸取动力。
27.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
28.提供了一种水面油污清理机器人,实现滤除泥沙、浮游生物等杂质后再进行水油分离,防止杂质对机器人产生不良影响,提高了清理效率;
29.过滤后的杂质统一进行处理,通过可拆卸结构,大大提高了清理杂质的方便性,结构简单使用方便;
30.水油分离结构安全可靠,利用重力分离原理有效分离水油混合液体,进一步提高了清理效果。
31.本实用新型的附加方面和优点将在下面的描述部分中变得明显,或通过本实用新型的实践了解到。
附图说明
32.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
33.图1是本实用新型一个实施例的一种水面油污清理机器人的结构图;
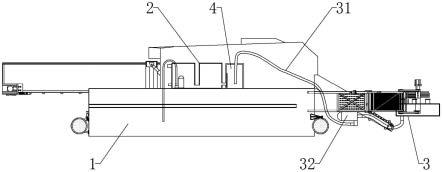
34.图2是本实用新型一个实施例的一种水面油污清理机器人的俯视图;
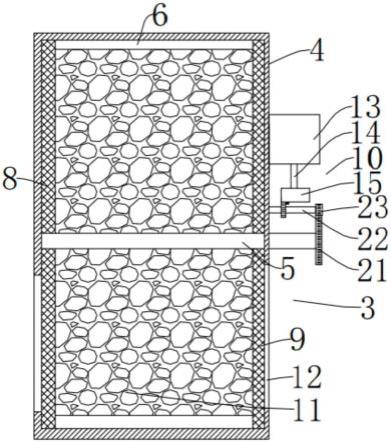
35.图3是本实用新型一个实施例的一种水面油污清理机器人中过滤部与分离装置的结构图。
36.其中,图1至图3中附图标记与部件名称之间的对应关系为:
37.1、机器人本体;2、分离装置;3、收集装置;4、过滤部;
38.21、分离舱;22、排水部;23、水位传感器;24、水油分界面检测单元;
39.31、吸油管;32、吸油泵;
40.221、排水管;222、排水泵;
41.41、杂质腔;42、滤网;43、壳体;
42.431、进水口;432、出水口。
具体实施方式
43.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和具
体实施方式对本实用新型进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
44.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用其它不同于在此描述的方式来实施,因此,本实用新型的保护范围并不受下面公开的具体实施例的限制。
45.下面参照图1至图3来描述根据本实用新型一些实施例提供的一种水面油污清理机器人。
46.本技术的一些实施例提供了一种水面油污清理机器人。
47.如图1至图3所示,本实用新型第一个实施例提出了一种水面油污清理机器人,包括可在水面漂浮前进的机器人本体1,所述机器人本体1设有收集装置3和与收集装置3连通的分离装置2,所述收集装置3至少可将机器人本体1一侧的待清理液体吸取至分离装置2内,所述分离装置2和收集装置3之间设有可拆除的过滤部4,所述待清理液体经过过滤部4进入分离装置2,所述分离装置2可将水油混合液体分离为水和油,并将水排回水面。
48.本实施例提出的一种水面油污清理机器人,机器人本体1可按照设定在水面上行进,漂浮于水面上,对水面上的油污进行清理,设于机器人本体1的收集装置3用于吸取机器人本体1周围的待清理液体,待清理液体中包括水、油以及杂质,杂质多为浮游生物、泥沙、垃圾等;待清理液体经过过滤部4,将杂质滤除,变为水油混合液体后进入分离装置2,再由分离装置2对水油混合液体进行分离,将其分离为水和油,将分离得到的水排出机器人本体1外,排回水面。分离水油混合液体的原理采用水密度大于油密度的性质,即将水油混合液体充入分离装置2后,液体将会产生分层,水将沉积在油液的下方,将位于下方的水排出,实现油污治理。其中,过滤部4可拆除于机器人本体1,方便对过滤部4进行清理,避免杂质过多阻碍水油混合液体进入分离装置2。
49.本实用新型第二个实施例提出了一种水面油污清理机器人,且在第一个实施例的基础上,如图1至图3所示,所述过滤部4形成一杂质腔41,所述杂质腔41与收集装置3连通,所述杂质腔41与分离装置2之间通过滤网42连通。
50.在该实施例中,杂质腔41用于存储杂质,收集装置3收集的待清理液体进入杂质腔41后,过滤网42将杂质阻挡于杂质腔41内,防止杂质进入分离装置2,影响分离装置2的正常工作,待清理液体经过过滤网42变为水油混合液体,过滤网42的密度可根据水域特征进行设置,此时杂质腔41可分离于机器人本体1,即将杂质腔41及腔内杂质取出,不会产生残留杂质。
51.本实用新型第三个实施例提出了一种水面油污清理机器人,且在上述任一实施例的基础上,如图1至图3所示,所述过滤部4与收集装置3和/或分离装置2可拆卸连接。
52.在该实施例中,过滤部4在收集装置3和分离装置2中任选其一进行可拆卸连接,或与两者同时可拆卸连接,均可实现杂质腔41与两者的分离,从而进一步对杂质进行清理,如:仅与收集装置3可拆卸连接时,过滤部4为一网兜,网兜套设于收集装置3的输出端,网兜内部为杂质腔41,杂质腔41内杂质较多时,将网兜从收集装置3的输出端拆下,对网兜进行清理;可拆卸连接方式可选择螺纹连接、卡接、绑接等。
53.本实用新型第四个实施例提出了一种水面油污清理机器人,且在上述任一实施例的基础上,如图1至图3所示,所述过滤部4还包括壳体43,所述杂质腔41形成于壳体43内部,
所述壳体43设有进水口431和出水口432,所述进水口431与收集装置3连通,所述出水口432与分离装置2连通,所述滤网42覆盖于出水口432,所述壳体43分别与收集装置3和分离装置2可拆卸连接。
54.在该实施例中,壳体43为过滤部4提供刚性支撑,壳体43靠近收集装置3的一端设有进水口431,壳体43靠近分离装置2一端设有出水口432,待清理液体通过进水口431进入杂质腔41,水油混合液体通过覆盖于出水口432的滤网42进入分离装置2。
55.本实用新型第五个实施例提出了一种水面油污清理机器人,且在上述任一实施例的基础上,如图1至图3所示,所述收集装置3与进水口431可拆卸连接,所述分离装置2与出水口432可拆卸连接。
56.在该实施例中,收集装置3通过水管与进水口431螺纹连接,分离装置2通过水管与出水口432螺纹连接。
57.本实用新型第六个实施例提出了一种水面油污清理机器人,且在上述任一实施例的基础上,如图1至图3所示,所述分离装置2包括若干分离舱21,所述若干分离舱21的底部相互连通。
58.在该实施例中,水油混合液体在若干分离舱21内进行重力分离,即使油处于分离舱21的上部,水沉积于分离舱21的下部;过滤部4的出水口432与靠近过滤部4的分离舱21底部连通,则经过重力分离,沉积于分离舱21下部的水将会在各分离舱21的底部流通,随着水油混合液体的输入,大部分的油液将留存于个分离舱21的上部。
59.本实用新型第七个实施例提出了一种水面油污清理机器人,且在上述任一实施例的基础上,如图1至图3所示,所述若干分离舱21中远离收集装置3的分离舱21底部连通有排水部22,所述排水部22包括排水泵222和与排水泵222连通的排水管221,所述排水管221位于分离舱21内的管口靠近分离舱21的底部。
60.在该实施例中,通过排水部22,将流通于各分离舱21底部的水排出分离装置2,排回水面,排水泵222提供排水动力,排水管221的管口尽量靠近分离舱21的内腔底壁,保证输出液体绝大部分为水,但需留有一定空隙,保证液体的正常排出。
61.本实用新型第八个实施例提出了一种水面油污清理机器人,且在上述任一实施例的基础上,如图1至图3所示,所述分离装置2设有控制单元,所述控制单元与水位传感器23连接,所述水位传感器23用于检测分离舱21内液面高度,所述控制单元控制排水泵222定时启闭,并根据分离舱21内液面高度控制清污机器人是否返航。
62.在该实施例中,收集装置3收取一定量待清理液体进入分离装置2,并经过一定时间的重力分离,控制单元开启排水泵222,将水排出,在抽取量一定,重力分离时间一定时,采用定时开启排水泵222的方法,可以实现分离装置2内留存液体为绝大部分为油,当油液积累到一定液面高度后,清污机器人返航到指定点清理分离装置2内的油污,需要说明的是收集装置3收取液体的量始终不会超过清污机器人触发返航的液面高度,从而保证足够的工作效率。
63.本实用新型第九个实施例提出了一种水面油污清理机器人,且在上述任一实施例的基础上,如图1至图3所示,所述分离装置2设有控制单元,所述控制单元与水油分界面检测单元24相连,所述水油分界面检测单元24设于靠近分离装置2的排水位置,所述控制单元根据水油分界面位置控制分离装置2排水功能的启闭。
64.在该实施例中,水油分界面检测单元24为水油界面传感器,可判断分离装置2内水和油的分界面,将水油界面传感器设于靠近排水管221的管口位置,当分界面抵达管口位置附近时,停止排水,防止将收集的油污再次排回水面。
65.本实用新型第十个实施例提出了一种水面油污清理机器人,且在上述任一实施例的基础上,如图1至图3所示,所述收集装置3包括吸油泵32和与吸油泵32连通的吸油管31,所述吸油管31与过滤部4连通。
66.在该实施例中,吸油管31与过滤部4可拆卸连接,待清理液体经过吸油管31进入过滤部4,吸油泵32提供吸取动力。
67.在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。