1.本实用新型属于自动门控制领域,涉及一种机器人过门系统。
背景技术:
2.机器人可代替人工进行日常的巡视和检测工作,具有自动巡检功能。可按照部署每日规划的巡视检测任务,根据预先设定的巡检点的位置,沿着预定轨迹对楼内各个区域进行自动巡视检测工作。而楼内各个区域之间存在关闭的门,如何自动通过门在楼内各个区域进行巡检,是目前的一个难题。
技术实现要素:
3.本实用新型的目的在于克服上述现有技术的缺点,提供一种机器人过门系统,能够实现机器人在各个区域之间自动过门,保证机器人对各区域进行自动巡检。
4.为达到上述目的,本实用新型采用以下技术方案予以实现:
5.一种机器人过门系统,包括第一信号接收模块和第二信号接收模块;
6.第一信号接收模块和第二信号接收模块分别设置在门两侧的墙体上,机器人上设置有信号发送模块,门上设置有自动开门机,自动开门机与第一信号接收模块和第二信号接收模块之间设置有处理器。
7.优选的,第一信号接收模块、第二信号接收模块和信号发送模块采用蓝牙。
8.优选的,第一信号接收模块和第二信号接收模块采用wifi信号接收模块,信号发送模块采用wifi信号发送模块。
9.优选的,第一信号接收模块和第二信号接收模块的信号接收距离为1-3m。
10.优选的,门采用平开门或对开门。
11.优选的,门后地面高度高于门前地面高度,门后地面设置有斜坡,斜坡位于门的正后方。
12.进一步,斜坡上设置有斜坡垫,斜坡垫上设置有多个橡胶凸起。
13.优选的,处理器采用单片机。
14.与现有技术相比,本实用新型具有以下有益效果:
15.本实用新型通过门两侧的第一信号接收模块和第二信号接收模块进行信号接收,当机器人路过附近时,第一信号接收模块或第二信号接收模块能够自动接收到信号发送模块发送的信号,并能够自动反馈至处理器中,处理器从而发出信号,自动开门机将门打开,供机器人通过,机器人远离时,信号中断,则门关闭,本方案不需要软件编程,仅需要硬件便可以实现机器人的自动过门,使机器人能够在各个区域之间自由活动,保证机器人对各区域进行自动巡检。
16.进一步,设置第一信号接收模块和第二信号接收模块的信号接收距离,能够避免机器人在较远位置经过时,过门系统误触发。
17.进一步,若门后地面高度高于门前地面高度,门后地面设置有斜坡,方便机器人通
过。
18.进一步,斜坡垫上的橡胶凸起能够避免机器人通过斜坡时打滑。
附图说明
19.图1为本实用新型的过门系统示意图;
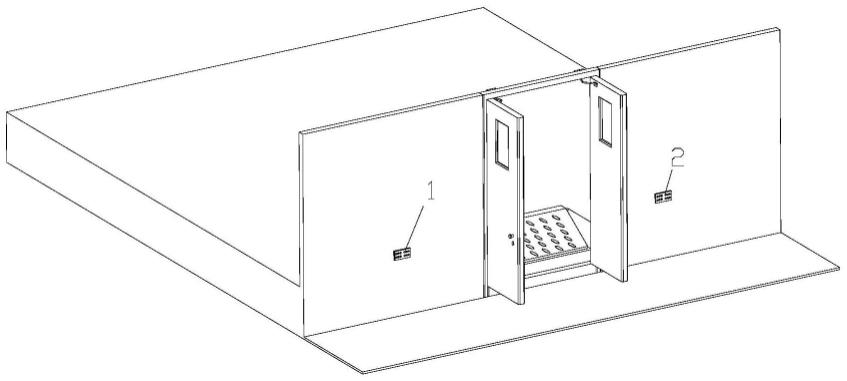
20.图2为本实用新型的门后视角示意图。
21.其中:1-第一信号接收模块;2-第二信号接收模块;3-自动开门机。
具体实施方式
22.下面结合附图对本实用新型做进一步详细描述:
23.参见图1所示,为本实用新型所述的机器人过门系统包括第一信号接收模块1和第二信号接收模块2。
24.第一信号接收模块1和第二信号接收模块2分别设置在门两侧的墙体上,机器人上设置有信号发送模块,门上设置有自动开门机3,自动开门机3与第一信号接收模块1和第二信号接收模块2之间设置有处理器,处理器采用单片机,用于接收第一信号接收模块1和/或第二信号接收模块2的信号,并反馈信号给自动开门机3。
25.第一信号接收模块1、第二信号接收模块2和信号发送模块的通讯协议可以为两种。
26.第一种为第一信号接收模块1、第二信号接收模块2和信号发送模块采用蓝牙。
27.第二种为第一信号接收模块1和第二信号接收模块2采用wifi信号接收模块,信号发送模块采用wifi信号发送模块。
28.第一信号接收模块1和第二信号接收模块2的信号接收距离为1-3m,避免机器人在较远位置经过时,过门系统误触发。
29.门采用平开门或对开门,采用平开门时,采用一个自动开门机3,采用对开门时,如图2所示,采用两个自动开门机3,分别控制两扇门板。
30.当门后地面高度高于门前地面高度时,如图2所示,门后地面设置有斜坡,斜坡位于门的正后方,方便机器人通过。斜坡上设置有斜坡垫,斜坡垫上设置有多个橡胶凸起,防止机器人打滑。
31.本实用新型所述的机器人过门系统在使用时,机器人巡检过程中持续通过信号发送模块发出信号,当机器人位于第一信号接收模块1和第二信号接收模块2的信号接收范围内时,第一信号接收模块1和第二信号接收模块2接收到了信号发送模块发出的信号,反馈至处理器中,处理器接受到信号后,再反馈信号给自动开门机3,自动开门机3将门打开,机器人通过,当机器人距离超出第一信号接收模块1和第二信号接收模块2的信号接收范围时,处理器未接收到信号,则不向自动开门机3反馈信号,则自动开门机3关闭。
32.以上内容仅为说明本实用新型的技术思想,不能以此限定本实用新型的保护范围,凡是按照本实用新型提出的技术思想,在技术方案基础上所做的任何改动,均落入本实用新型权利要求书的保护范围之内。
技术特征:
1.一种机器人过门系统,其特征在于,包括第一信号接收模块(1)和第二信号接收模块(2);第一信号接收模块(1)和第二信号接收模块(2)分别设置在门两侧的墙体上,机器人上设置有信号发送模块,门上设置有自动开门机(3),自动开门机(3)与第一信号接收模块(1)和第二信号接收模块(2)之间设置有处理器。2.根据权利要求1所述的机器人过门系统,其特征在于,第一信号接收模块(1)、第二信号接收模块(2)和信号发送模块采用蓝牙。3.根据权利要求1所述的机器人过门系统,其特征在于,第一信号接收模块(1)和第二信号接收模块(2)采用wifi信号接收模块,信号发送模块采用wifi信号发送模块。4.根据权利要求1所述的机器人过门系统,其特征在于,第一信号接收模块(1)和第二信号接收模块(2)的信号接收距离为1-3m。5.根据权利要求1所述的机器人过门系统,其特征在于,门采用平开门或对开门。6.根据权利要求1所述的机器人过门系统,其特征在于,门后地面高度高于门前地面高度,门后地面设置有斜坡,斜坡位于门的正后方。7.根据权利要求6所述的机器人过门系统,其特征在于,斜坡上设置有斜坡垫,斜坡垫上设置有多个橡胶凸起。8.根据权利要求1所述的机器人过门系统,其特征在于,处理器采用单片机。
技术总结
本实用新型公开了一种机器人过门系统,包括第一信号接收模块和第二信号接收模块;第一信号接收模块和第二信号接收模块分别设置在门两侧的墙体上,机器人上设置有信号发送模块,门上设置有自动开门机,自动开门机与第一信号接收模块和第二信号接收模块之间设置有处理器。能够实现机器人在各个区域之间自动过门,保证机器人对各区域进行自动巡检。保证机器人对各区域进行自动巡检。保证机器人对各区域进行自动巡检。
技术研发人员:王恩民 刘立勋 孙捷 施俊佼 胡皓 褚杰 袁赛杰 缪磊鑫 任鑫 王华 童彤 赵鹏程 杜静宇
受保护的技术使用者:华能盐城大丰新能源发电有限责任公司
技术研发日:2021.09.29
技术公布日:2022/7/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。