1.本实用新型属于水下机器人领域,尤其涉及一种天线折叠机构、折叠天线及水下机器人。
背景技术:
2.水下机器人包括有缆遥控水下机器人(简称rov)和无缆自主水下机器人(简称auv),而天线是无缆自主水下机器人实现通讯功能的主要部件。大部分auv为实现较高的航速都采用了流线型结构,表面尽量减少凸起结构以降低流体阻力,而天线外壳部分一般采用鱼鳍或水滴型外壳,可以防止天线在auv运动过程中折断同时降低流体阻力,但通常天线高度较高,导致虽然天线外壳采取了流线型外形但仍然会对auv产生较大阻力,进而影响运动和控制。
3.针对上述存在的问题,现有技术出现了一种折叠天线,采用折叠机构升起或放下天线,降低天线对auv运动阻力的影响,但现有的折叠机构均存在传动组件部分暴露在水环境下的缺陷,会有卡死或被异物影响的风险。例如在专利cn113708039a中,采用蜗轮蜗杆的传动形式,在水下运行时蜗轮蜗杆暴露在水环境下;例如在专利cn112018488a中,采用丝杠配合滑杆的传动形式,但丝杠和滑杆暴露在水环境下。
4.基于此,本案由此提出。
技术实现要素:
5.本实用新型的目的在于提供一种基于密封传动机构的auv天线折叠机构,在确保实用性的前提下,降低天线对auv运动阻力的影响。
6.为了实现上述目的,本实用新型的技术方案如下:
7.一种天线折叠机构,包括密封连接的齿轮箱和箱盖,所述齿轮箱内通过轴承支承有传动轴,所述传动轴的一端设有传动齿轮一,另一端设有传动齿轮二,所述齿轮箱上密封连接有电机机构,电机机构的电机转轴伸入齿轮箱内且设有与传动齿轮一啮合的输入齿轮;所述齿轮箱包括一体成型的基座,基座内通过轴承支承有天线转轴,所述天线转轴的一端伸入齿轮箱内且设有与传动齿轮二啮合的输出齿轮,另一端伸出基座且设有天线连接结构,所述天线转轴与基座之间设有密封件,密封件位于基座远离齿轮箱的一端。
8.进一步的,所述电机机构由靠近齿轮箱侧向远离齿轮箱侧依次包括有输入齿轮、轴套、减速器外壳、减速器、无框电机、驱动器外壳和水密连接器,所述齿轮箱上设有与用于固定电机机构的法兰,法兰与电机机构之间设有密封件。
9.进一步的,所述输入齿轮、输出齿轮、传动齿轮一、传动齿轮二均采用伞齿轮。
10.进一步的,所述齿轮箱内安装轴承处设有卡槽。
11.进一步的,所述基座内安装轴承处设有卡槽。
12.进一步的,所述齿轮箱上设有维修孔,维修孔上安装有盲板,所述维修孔与盲板之间设有密封件。
13.进一步的,所述基座有一个或多个。
14.一种折叠天线,包括天线和上述天线折叠机构,所述天线通过天线连接结构与所述天线转轴连接。
15.进一步的,所述天线和所述天线转轴之间采用键和键槽连接。
16.一种水下机器人,包括上述折叠天线。
17.本实用新型的优点在于:该结构可以使水下机器人行驶过程中将天线回收至流体结构内部,从而大幅降低水下行进阻力,在需要通讯时则将天线升起,可完成通讯作业;该结构整体采用伞齿传递,齿轮箱采用o型圈密封配合格莱圈的密封形式可达到无渗漏运行,实现内部机构长期稳定工作。
附图说明
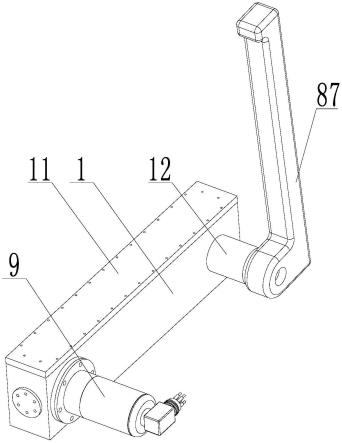
18.图1为实施例中天线折叠机构的三维构造示意图;
19.图2为图1中齿轮箱的内部构造示意图;
20.图3为图1的爆炸示意图;
21.图4为图1另一视角的爆炸示意图;
22.图5为实施例中天线折叠机构基座处的剖视示意图;
23.图6为实施例中水下机器人天线回收状态示意图;
24.图7为实施例中水下机器人天线升起状态示意图;
25.标号说明
26.齿轮箱1,法兰11,基座12,维修孔2,盲板21;小伞齿一31,小伞齿二32,轴套一41,轴套二42,轴承一51,轴承二52,传动轴6,箱盖7;
27.大伞齿一81,轴套三82,轴承三83,天线转轴84,轴承四85,格莱圈86,天线87,天线压盖88,;
28.电机机构9,大伞齿二91,轴套四92,减速器外壳93,减速器94,无框电机95,电机外壳96,驱动器外壳97,水密连接器98。
具体实施方式
29.以下结合实施例对本实用新型作进一步详细描述。
30.本实施例提出一种无缆自主水下机器人,如图1所示,该水下机器人包括一折叠天线,折叠天线的传动部分密封在齿轮箱1内,电机机构9通过齿轮箱1传递动力,实现天线87的折叠,可有效避免传动部分被卡死或被异物影响的风险。
31.参考图2至图4,齿轮箱1上通过螺钉固定有箱盖7,齿轮箱1与箱盖7之间可设置密封圈,防止渗漏。齿轮箱1为矩形构造,齿轮箱1轴向两端的端面上开设有维修孔2,维修孔2采用盲板21封堵,且盲板21上设有o型圈实现静态密封。齿轮箱1内设有两固定支座,一固定支座上安装有轴承一51,另一固定支座上安装有轴承二52,轴承一51和轴承二52上支承有传动轴6,传动轴6的两端分别安装有小伞齿一31和小伞齿二32。以图3为例,安装时,先在左侧固定支座内安装轴承一51,然后从右侧维修孔2内将传动轴6穿入并穿过安装好的轴承一51,然后在传动轴6右侧安装轴承二52,之后将轴承二52安装在右侧的固定支座上,之后在传动轴6的左端依次套入轴套一41和小伞齿一31并用螺栓固定,在传动轴6的右端依次套入
轴套二42和小伞齿二32并用螺栓固定。
32.依旧可参考图3,齿轮箱1的右端一侧设有一体成型的基座12,基座12由内向外依次设有大伞齿一81、轴套三83、轴承三83、天线转轴84、轴承四85、格莱圈86、天线87及天线压盖88。如图2所示,大伞齿一81与小伞齿二32啮合,大伞齿一81与天线转轴84的一端固定,天线转轴84通过两轴承支承在基座12内,天线转轴84的另一端伸出基座12并与天线87通过键和键槽连接。如图5所示,格莱圈86位于基座12远离齿轮箱1的一端,起到密封防泄露的作用。
33.齿轮箱1的左端一侧设有电机机构9,齿轮箱1上安装有法兰11,法兰11与电机机构9固定并采用o型密封圈静密封。所述电机机构9依次包括有大伞齿二91、轴套四92、减速器外壳93、减速器94、无框电机95、电机外壳96、驱动器外壳97和水密连接器98,其中大伞齿二91与小伞齿一31啮合,无框电机95的转轴伸入齿轮箱1内并与大伞齿二91固定。
34.本实施例折叠天线的动力传递路线为:无框电机95的转轴动力依次通过大伞齿二91、小伞齿一31、传动轴6、小伞齿二32、大伞齿一81、天线转轴84后,传递给天线87,从而带动天线87的转动,实现折叠与升起。如图6所示,为水下机器人天线回收状态示意图;如图7所示,为水下机器人天线升起状态示意图。
35.作为优选,本实施例在齿轮箱1内安装轴承处设有卡槽,在基座12内安装轴承处同样设有卡槽,以防止轴承发生滑动。
36.参考图3,图中只在齿轮箱1右端的一侧设置了基座12,当水下机器人需要多组天线87的时候,可以在齿轮箱1右端的两侧均设置基座12,实现多组天线87的传动。
37.上述实施例仅用于解释说明本发明的构思,而非对本发明权利保护的限定,凡利用此构思对本发明进行非实质性的改动,均应落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
