技术特征:
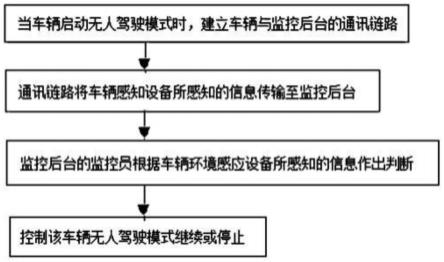
1.一种无人驾驶车辆的远程监控方法,其特征在于,包括:当车辆启动无人驾驶模式时,建立车辆与监控后台的通讯链路;所述通讯链路用于将车辆感知设备所感知的信息传输至监控后台,并由监控后台的监控员根据车辆环境感应设备所感知的信息作出判断,控制该车辆无人驾驶模式继续或停止;所述监控后台若控制该车辆无人驾驶模式停止或控制车辆制动系统停止后,由车辆向局域网服务器和/或云服务器发送车辆应急处理请求,由局域网服务器和/或云服务器调度距离该车辆最近的接应员或者调度附近空闲的接应员处理该车辆。2.根据权利要求1所述的无人驾驶车辆的远程监控方法,其特征在于,所述车辆无人驾驶模式的启动/停止是根据车辆当前控制者发送的指令而切换的。3.根据权利要求2所述的无人驾驶车辆的远程监控方法,其特征在于,所述车辆当前控制者发送的指令包括但不限于自助泊车、指定空间位置汇合、指定时间和空间位置汇合。4.根据权利要求3所述的无人驾驶车辆的远程监控方法,其特征在于,所述车辆环境感应设备包括但不限于设置在车身上的至少一个摄像头、设置在车身上的至少一个超声波雷达、设置在车身上的至少一个毫米波雷达、设置在车身上的至少一个激光雷达、设置在车身上的至少一个红外传感器以及车辆当前所在环境所部属的一种或多种环境感应设备。5.根据权利要求4所述的无人驾驶车辆的远程监控方法,其特征在于,所述车辆当前控制者通过手持移动终端或者车钥匙中的信号发射器发送控制指令,该控制指令的接收方为服务器或车辆:若接收方为服务器时,由服务器建立与车辆通讯,将控制指令传输给车辆,由车辆后台规划行驶路径并控制车辆行驶;或由服务器分析控制指令进而规划该车辆的行驶路径,并将规划结果传输至车辆,由车辆启动无人驾驶模式并执行该规划;若接收方为车辆时,由车辆后台根据控制指令规划路径、启动无人驾驶模式根据规划路径行驶。6.根据权利要求5所述的无人驾驶车辆的远程监控方法,其特征在于,若车辆在无人驾驶模式下,自建立与监控后台的通讯链路起至车辆到达目的地为止,在监控后台监控员的监视下并未获得停止该车辆无人驾驶模式状态的事件,则在车辆到达目的地后,由车辆停止无人驾驶模式并应答监控后台、局域网服务器、云服务器、车辆当前控制者中的一个或几个。7.根据权利要求6所述的无人驾驶车辆的远程监控方法,其特征在于,当监控后台收到车辆停止无人驾驶模式的应答后,监控后台切断该车辆与监控后台的通讯链路,并将监控该车辆的监控员所在的坐席标记为空闲,以便监控后台后续分配车辆监控请求。8.根据权利要求1所述的无人驾驶车辆的远程监控方法,其特征在于,所述车辆启动无人驾驶模式的启动条件为以下条件任意一种:a接收车辆当前控制者发送的指令,获取路径规划结果以及车辆当前周围环境信息,综合判断车辆当前周围环境和/或路径规划沿途环境信息是否符合无人驾驶模式的启动条件:若符合无人驾驶模式的启动条件,则车辆启动无人驾驶模式;若不符合无人驾驶模式的启动条件,将应答结果写入净载数据,应答车辆当前控制者;
b接收局域网服务器的运营调度指令,获取路径规划结果以及车辆当前周围环境信息,综合判断车辆当前周围环境和/或路径规划沿途环境信息是否符合无人驾驶模式的启动条件:若不符合无人驾驶模式的启动条件,将应答结果写入净载数据,应答局域网服务器;c接收云服务器的运营调度指令,获取路径规划结果以及车辆当前周围环境信息,综合判断车辆当前周围环境和/或路径规划沿途环境信息是否符合无人驾驶模式的启动条件:若不符合无人驾驶模式的启动条件,将应答结果写入净载数据,应答云服务器;d接收监控后台的运营调度指令,获取路径规划结果以及车辆当前周围环境信息,综合判断车辆当前周围环境和/或路径规划沿途环境信息是否符合无人驾驶模式的启动条件:若不符合无人驾驶模式的启动条件,将应答结果写入净载数据,应答监控后台。9.根据权利要求8所述的无人驾驶车辆的远程监控方法,其特征在于,所述车辆启动无人驾驶模式的启动条件还包括前置的初始化确认程序,所述初始化确认程序包括开启车辆装载的视觉传感器、雷达传感器、红外传感器、蜂鸣器中的一种或几种,获取一种或几种车辆周围环境信息后,融合车辆周围环境信息并判断车辆周围的可活动空间,预测车辆周围移动物体的活动范围,并综合活动空间要素和移动物体的活动范围要素对该车辆可否开启无人驾驶模式进行打分;若打分分值高于预设值,则判断车辆可以开启无人驾驶模式,初始化确认程序完成;若打分分值低于预设值,则判断车辆不可以开启无人驾驶模式,初始化程序失败。10.根据权利要求9所述的无人驾驶车辆的远程监控方法,其特征在于,若车辆在特定时间段内接收到车辆当前控制者发送的指令、局域网服务器的运营调度指令、云服务器的运营调度指令、监控后台的运营调度指令中的一种或几种,则以当前优先级顺序的设置排列车辆当前控制者、局域网服务器、云服务器、监控后台的指令,选取优先级最高的调度指令。11.根据权利要求9所述的无人驾驶车辆的远程监控方法,其特征在于,所述车辆与监控后台的通讯链路为双向通信链路,所述双向通信链路中所传输的净载数据为:车辆发送给监控后台的净载数据包括但不限于车辆装载视觉传感器所捕获的图像、车辆装载雷达传感器所捕获车辆周围物体与车身的角度、车辆周围物体与车身的距离、车辆周围物体与车身的相对速度、车辆周围环境的红外成像中的一种或几种;监控后台发送给车辆的净载数据包括但不限于连续性控制车辆制动系统启动/停止的指令、控制车辆无人驾驶模式启动/停止的指令、控制车辆无人驾驶模式和人工驾驶模式切换的指令中的一种或几种。12.根据权利要求1所述的无人驾驶车辆的远程监控方法,其特征在于,所述监控后台若控制该车辆无人驾驶模式停止或控制车辆制动系统停止后,在预先设置的等待通讯链路恢复时间范围中,车辆以一定时间间隔向监控后台发出通讯链路连接请求;监控后台接收到通讯链路连接请求后,选定当前空闲的监控员坐席,并将该车辆与该监控员重新建立通讯链路。13.根据权利要求1所述的无人驾驶车辆的远程监控方法,其特征在于,所述局域网服务器和/或云服务器调度距离该车辆最近的接应员或者调度附近空闲的接应员处理该车辆时,应保持局域网服务器和/或云服务器间隔指定时间接收车辆的位置
信息应答包。14.一种无人驾驶车辆的远程监控系统,其特征在于,包括车辆无人驾驶模块、车辆环境感应设备、通讯链路、监控后台、监控员;所述监控后台包括监控运营模块;所述监控后台运营模块还包括应急处理模块;所述车辆无人驾驶模块启动时,所述车辆与监控后台之间通过通讯链路相互通讯;所述车辆端将车辆环境感应设备采集到的信息以通讯链路传输到监控后台,监控后台给该车辆调配监控员,所述监控员根据车辆环境感应设备所感知的信息作出判断,控制车辆无人驾驶模块的启动或停止;所述应急处理模块用于在监控后台若控制该车辆无人驾驶模式停止或控制车辆制动系统停止后,由车辆向局域网服务器和/或云服务器发送车辆应急处理请求,由局域网服务器和/或云服务器调度距离该车辆最近的接应员或者调度附近空闲的接应员处理该车辆。15.根据权利要求14所述的无人驾驶车辆的远程监控系统,其特征在于,还包括服务器,所述服务器用于与车辆通讯,将控制指令传输给车辆,由车辆后台规划行驶路径并控制车辆行驶;或由服务器分析控制指令进而规划该车辆的行驶路径,并将规划结果传输至车辆,由车辆启动无人驾驶模式并执行该规划。16.根据权利要求15所述的无人驾驶车辆的远程监控系统,其特征在于,还包括移动终端,所述移动终端用于由车辆当前控制者控制、发送包括但不限于自助泊车、指定空间位置汇合、指定时间和空间位置汇合的指令,所述车辆无人驾驶模块直接接收该指令、或通过局域网服务器和/或云服务器接收该指令和/或控制指令之后,由车辆无人驾驶模块执行该指令和/或控制指令。17.根据权利要求15所述的无人驾驶车辆的远程监控系统,其特征在于,所述监控后台还包括监控运营模块,所述监控运营模块在监控后台收到车辆停止无人驾驶模式的应答后,监控后台切断该车辆与监控后台的通讯链路,并将监控该车辆的监控员所在的坐席标记为空闲,以便监控后台后续分配车辆监控请求。18.根据权利要求17所述的无人驾驶车辆的远程监控系统,其特征在于,所述监控后台运营模块还包括重调度模块,所述重调度模块监控后台若控制该车辆无人驾驶模式停止或控制车辆制动系统停止后,在预先设置的等待通讯链路恢复时间范围中,车辆以一定时间间隔向监控后台发出通讯链路连接请求;监控后台接收到通讯链路连接请求后,选定当前空闲的监控员坐席,并将该车辆与该监控员重新建立通讯链路。19.根据权利要求18所述的无人驾驶车辆的远程监控系统,其特征在于,所述车辆无人驾驶模块还包括启动初始化模块,所述启动初始化模块包括开启车辆装载的视觉传感器、雷达传感器、红外传感器、蜂鸣器中的一种或几种,获取一种或几种车辆周围环境信息后,融合车辆周围环境信息并判断车辆周围的可活动空间,预测车辆周围移动物体的活动范围,并综合活动空间要素和移动物体的活动范围要素对该车辆可否开启无人驾驶模式进行打分,当分值高于预设值时,启动初始化模块完成车辆无人驾驶模块的启动;所述车辆无人驾驶模块还包括停止模块,所述停止模块用于将停止时刻的车辆位置坐标发送至车辆当前控制者、局域网服务器、云端服务器中的一种或几种。20.一种无人驾驶车辆的远程监控终端,其特征在于,包括处理器和存储器,所述存储器存储有程序指令,所述处理器运行程序指令实现如权利要求1至13任一权利要求上述所
述的无人驾驶车辆的远程监控方法中的步骤。21.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:该程序被处理器执行时实现如权利要求1至12任一权利要求所述无人驾驶车辆的远程监控的方法中的步骤。
技术总结
本发明提供一种无人驾驶车辆的远程监控方法、系统、终端和存储介质,方法包括:当车辆启动无人驾驶模式时,建立车辆与监控后台的通讯链路;通讯链路用于将车辆感知设备所感知的信息传输至监控后台,并由监控后台的监控员根据车辆环境感应设备所感知的信息作出判断,控制车辆无人驾驶模式继续或停止;监控后台若控制车辆无人驾驶模式停止或控制车辆制动系统停止后,由车辆向局域网服务器和/或云服务器发送车辆应急处理请求,由局域网服务器和/或云服务器调度距离该车辆最近的接应员或者调度附近空闲的接应员处理该车辆。本发明解决了无人驾驶车辆在复杂场景、特定场景中安全性欠缺的问题,同时保证了特定场景、复杂场景中车辆调度和运营的效率。辆调度和运营的效率。辆调度和运营的效率。
技术研发人员:唐锐
受保护的技术使用者:纵目科技(上海)股份有限公司
技术研发日:2018.09.14
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。