技术特征:
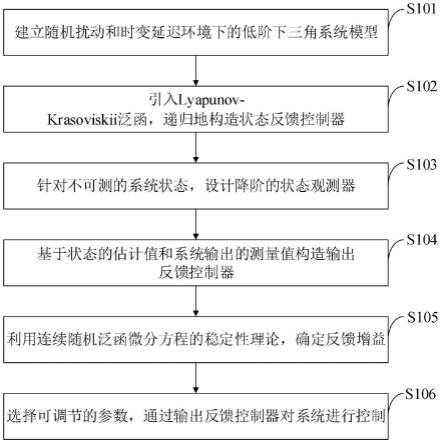
1.一种随机扰动和时延环境下的非光滑系统控制方法,其特征在于,所述随机扰动和时延环境下的非光滑系统控制方法包括:基于连续随机泛函微分方程的稳定性理论,通过推广加幂积分器方法和lyapunov-krasoviskii泛函方法,实现针对非光滑的低阶下三角系统在随机扰动和时延环境下的动态输出反馈控制。2.如权利要求1所述的随机扰动和时延环境下的非光滑系统控制方法,其特征在于,所述随机扰动和时延环境下的非光滑系统控制方法包括以下步骤:步骤一,建立随机扰动和时变延迟环境下的低阶下三角系统模型;步骤二,引入lyapunov-krasoviskii泛函,递归地构造状态反馈控制器;步骤三,针对不可测的系统状态,设计降阶的状态观测器;步骤四,基于状态的估计值和系统输出的测量值构造一个输出反馈控制器;步骤五,利用连续随机泛函微分方程的稳定性理论,确定反馈增益;步骤六,选择可调节的参数,通过输出反馈控制器对系统进行控制。3.如权利要求2所述的随机扰动和时延环境下的非光滑系统控制方法,其特征在于,所述随机扰动和时延环境下的非光滑的低阶下三角系统模型为:式中,r∈(0,1)是系统的阶,u是系统的控制输入,n是系统的维数,t表示时间,y表示系统的输出,w表示一个标准的wiener过程,t表示矩阵的转置,[
·
]
r
表示sign(
·
)|
·
|
r
,(x1,x2,
…
,x
n
)
t
为系统的状态,对任意的i=1,2,
…
,n,其中x
jd
=x
j
(t-d
j
(t)),j=1,2,
…
,i,d
j
(t)是时变延迟,f
i
和g
i
是连续的非线性函数;通过递归方式为系统构造的状态反馈控制器为:式中,β
i
=((c
ii
h
i1
h
i2
h
i3
)/k
i
)
1/r
,其中c
ii
,h
i1
,h
i2
,h
i3
>0是确定的常数,k
i
>0是可以调节的参数,x
i
为系统状态的第i个分量,i=1,2,
…
,n;通过递归过程为系统构造状态反馈控制器的过程中所采用的lyapunov-krasoviskii泛函为:式中,i=1,2,
…
,n,v0=0,k,k
i
>0是可调节参数,a
i
,v
i
是已知常数,是已知常数,β
j-1
=((c
j-1,j-1
h
j-1,1
h
j-1,2
h
j-1,3
)/k
j-1
)
1/r
,c
j-1,j-1
,h
j-1,1
,h
j-1,2
,h
j-1,3
是确定的正常数,d
j
=d
j
(t)是系统的时变延迟,j=1,2,
…
,i,r∈(0,1)是系统的阶,n是系统的维数。针对不可测的系统状态x
i
,i=2,3,
…
,n构造降阶观测器的动态方程为:
式中,式中,为系统状态x
i
的估计值,其中s
i-1
是状态观测器的增益,r∈(0,1)是系统的阶,u是系统的控制输入,n是系统的维数。所述基于估计状态值和系统输出为系统构造的输出反馈控制器为:式中,是由观测器方程为系统状态x
i
产生的估计值,y是系统可测量的输出,r∈(0,1)是系统的阶,β
i
=((c
ii
h
i1
h
i2
h
i3
)/k
i
)
1/r
,其中c
ii
,h
i1
,h
i2
,h
i3
>0是确定的常数,k
i
>0是可以调节的参数,i=1,2,
…
,n。确定使闭环系统稳定的反馈增益使用的全局lyapunov-krasoviskii泛函为:v=v
n
(x1,x2,
…
,x
n
) u(e2,e3,
…
,e
n
)式中,v
n
(x1,x2,
…
,x
n
)是所述泛函v
n
,x
i
,i=1,2,
…
,n是系统的状态;e
i
是误差变量,表示状态x
i
与估计值的差,i=2,3,
…
,n;是第i个子系统的虚拟控制器,d
i
=d
i
(t)是系统的时变时延,i=1,2,
…
,n,r∈(0,1)是系统的阶,n是系统的维数。4.一种应用如权利要求1~3任意一项所述的随机扰动和时延环境下的非光滑系统控制方法的随机扰动和时延环境下的非光滑系统,其特征在于,所述随机扰动和时延环境下的非光滑系统包括:系统模型构建模块,用于建立随机扰动和时变延迟环境下的低阶下三角系统模型;控制器构造模块,用于引入lyapunov-krasoviskii泛函,递归地构造状态反馈控制器;基于状态的估计值和系统输出的测量值构造一个输出反馈控制器;观测器设计模块,用于针对不可测的系统状态,设计降阶的状态观测器;反馈增益确定模块,用于利用连续随机泛函微分方程的稳定性理论,确定反馈增益;系统控制模块,用于选择可调节的参数,通过输出反馈控制器对系统进行控制。5.一种计算机设备,其特征在于,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如下步骤:基于连续随机泛函微分方程的稳定性理论,通过推广加幂积分器方法和lyapunov-krasoviskii泛函方法,实现针对非光滑的低阶下三角系统在随机扰动和时延环境下的动态输出反馈控制。6.一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如下步骤:基于连续随机泛函微分方程的稳定性理论,通过推广加幂积分器方法和lyapunov-krasoviskii泛函方法,实现针对非光滑的低阶下三角系统在随机扰动和时延环境下的动态输出反馈控制。7.一种信息数据处理终端,其特征在于,所述信息数据处理终端用于实现如权利要求4
所述的随机扰动和时延环境下的非光滑系统。8.一种应用如权利要求1~3任意一项所述的随机扰动和时延环境下的非光滑系统控制方法的交互式液位平衡系统。9.一种应用如权利要求1~3任意一项所述的随机扰动和时延环境下的非光滑系统控制方法的液压控制系统。10.一种应用如权利要求1~3任意一项所述的随机扰动和时延环境下的非光滑系统控制方法的漏桶系统。
技术总结
本发明属于非线性系统的反馈控制技术领域,公开了一种随机扰动和时延环境下的非光滑系统及控制方法,建立随机扰动和时变延迟环境下的低阶下三角系统模型;引入Lyapunov-Krasoviskii泛函,递归地构造状态反馈控制器;针对不可测的系统状态,设计降阶的状态观测器;基于状态的估计值和系统输出的测量值构造一个输出反馈控制器;利用连续随机泛函微分方程的稳定性理论,确定反馈增益;选择可调节的参数,通过输出反馈控制器对系统进行控制。本发明充分考虑了随机扰动和时间延迟对系统性能的影响,通过引入新型的Lyapunov-Krasoviskii泛函提出了一种能够克服随机扰动和时延影响的控制器设计方法。和时延影响的控制器设计方法。和时延影响的控制器设计方法。
技术研发人员:贾金平 戴浩 赵文波 黄建文 梁茂林
受保护的技术使用者:天水师范学院
技术研发日:2022.05.05
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。