1.本发明涉及一种用于磁悬浮万向机动卫星平台的机动路径设计方法,适用于磁悬浮万向机动卫星平台的姿态控制系统。
技术背景
2.磁悬浮万向机动卫星平台是一种新型卫星平台,由于卫星平台舱和载荷舱通过磁悬浮技术实现了隔离,两者之间不会产生接触,卫星平台受到的振动以及自身产生的振动不会传递到载荷上,为载荷提供了一个甚稳超静的工作环境。通过磁悬浮技术实现载荷的机动控制,避免了整星的姿态机动,载荷舱通过洛伦兹力磁轴承直接驱动控制,可以实现高精度高动态指向控制。
3.磁悬浮万向机动卫星平台进行大角度机动时,由于平台舱和载荷舱之间采用磁轴承连接,其刚度有限,会造成载荷舱振动的问题,不利于卫星平台姿态的稳定性和载荷舱的精确指向。
4.本发明基于动力学仿真并结合洛伦兹力磁轴承机理特性,建立在轨平台舱-载荷舱洛伦兹力磁轴承偏转动力学模型;在此基础上,基于频率特性分析原理设计出一种用于磁悬浮万向机动卫星平台的机动路径设计方法,根据磁轴承刚度阻尼和控制器参数合理确定机动路径,从而达到尽可能降低平台舱机动引起的载荷舱振动的目的。
技术实现要素:
5.本发明解决的技术问题是:为磁悬浮万向机动卫星平台大角度机动造成载荷舱振动的问题,提出了一种用于磁悬浮万向机动卫星平台的机动路径设计方法。该方法通过分析磁轴承刚度阻尼特性和控制器参数,合理确定机动路径,从而达到尽可能降低平台舱机动引起的载荷舱振动的目的。
6.具体包括以下步骤:
7.(1)建立在轨平台舱-载荷舱洛伦兹力磁轴承偏转动力学模型
8.磁悬浮万向机动卫星平台由平台舱和载荷舱组成,载荷舱主要由磁悬浮吊舱和有效载荷(光学跟踪或定向能武器)组成;其中径向磁轴承控制磁悬浮吊舱的径向两自由度悬浮,轴向磁轴承控制磁悬浮吊舱的轴向悬浮,偏转磁轴承控制磁悬浮吊舱的两自由度偏转,由于航天器平台进行姿态机动时,主要涉及两个旋转自由度,故以洛伦兹力磁轴承为研究对象;设航天器本体系为oxyz,惯性系为oxyz,初始时刻对应坐标轴平行。
9.当磁悬浮载荷舱绕x轴和y轴偏转时,机动过程产生的控制力矩可以表示为:
[0010][0011]
其中t
α
为x轴控制力矩,t
β
为y轴控制力矩,α为载荷舱绕x轴的偏转角,β为载荷舱绕y轴的偏转角,j
x
为载荷舱径向转动惯量;
[0012]
由于载荷舱的机动通过偏转洛伦兹力磁轴承控制,偏转洛伦兹力磁轴承产生的控
制力矩可以表示为:
[0013][0014]
其中n表示线圈匝数,b表示磁场强度大小,φ为洛伦兹力磁轴承的每组线圈对应的圆心角,lr为洛伦兹力磁轴承定子骨架半径,i
x
为x轴方向控制电流,iy为y轴方向控制电流,联立等式(1)和等式(2)可以得到:
[0015][0016]
通过(3)式可知,洛伦兹力磁轴承控制磁悬浮载荷舱的二个自由度是相互解耦的;
[0017]
(2)确定载荷舱洛伦兹力磁轴承偏转系统刚度阻尼特性
[0018]
当只有载荷舱偏转时,针对载荷舱绕x轴偏转自由度,载荷舱采用状态反馈控制,反馈控制信号采用:
[0019][0020]
其中k1和k2为状态反馈参数,则载荷舱绕x轴偏转自由度动力学方程可以表示为:
[0021][0022]
可以得到绕x轴偏转自由度的系统刚度为:
[0023][0024]
载荷舱绕x轴偏转自由度的系统阻尼为:
[0025][0026]
可以得到载荷舱绕x轴偏转自由度的系统阻尼比为:
[0027][0028]
载荷舱绕x轴偏转自由度的系统无阻尼固有频率为:
[0029][0030]
可以得到载荷舱绕x轴偏转自由度的系统有阻尼固有频率为:
[0031][0032]
由于参数对称特性,载荷舱绕y轴偏转自由度的相关参数与绕x轴偏转自由度相同;
[0033]
(3)确定激振幅值最小的机动路径
[0034]
当平台舱带动载荷舱进行机动时,为保持载荷舱随动的同时可以进行偏转控制,
线圈电流应包含两部分,偏转电流is和机动电流im,于是惯性系下载荷舱绕x轴偏转自由度系统可以表示为:
[0035][0036]
其中θ为惯性系下载荷舱绕x轴偏转角,则式(14)可以表示为:
[0037][0038]
可得:
[0039][0040]
设计航天器平台舱的机动角加速度指令为正弦型:
[0041][0042]
其中表示惯性系下平台舱机动角加速度,由频率特性可知,当指令频率等于载荷舱共振频率时,系统发生共振,即:
[0043][0044]
设机动总姿态角为ω,由(17)有:
[0045][0046]
则系统幅频特性为:
[0047][0048]
令航天器平台的最大机动角速度为为避免共振,机动角加速度应尽量远离共振频率,由式(20)可知,卫星以最大机动角速度恰好引起共振时,有:
[0049][0050]
经仿真验证,为了尽可能避免共振,机动策略可由下式给出:
[0051][0052]
其中
[0053]
2.为保证机动速度,系统应为欠阻尼或临界阻尼,即:
[0054][0055]
可得:
[0056][0057]
为兼顾机动速度和精度,λ应尽可能远离1,应尽可能接近1,经仿真可知,λ、满足如下条件时,机动速度和精度能够同时得到满足:
[0058][0059]
则k1和k2可通过如下方法确定:
[0060][0061]
载荷绕y轴偏转自由度的相关参数与绕x轴偏转自由度相同。
[0062]
本发明的方案与现有方案相比,主要优点在于:现有的磁悬浮万向卫星平台在机动时未考虑磁轴承的刚度和阻尼特性,在机动过程中容易引起载荷舱的振动,不利于有效载荷的应用。本发明通过设计一种用于磁悬浮万向机动卫星平台的机动路径,在控制器参数确定的情况下,可以根据航天器平台舱的最大机动能力合理确定机动角速度路径,保证了载荷舱机动的快速性和稳定性。
附图说明
[0063]
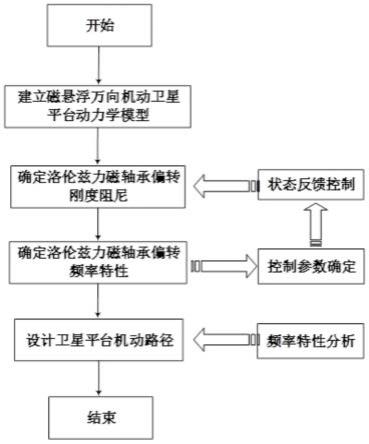
图1为本发明的流程图;
[0064]
图2为磁悬浮万向卫星平台结构及坐标系图;
[0065]
图3为传统机动方法本体系下载荷舱x轴角位移仿真图;
[0066]
图4为本发明实施例本体系下载荷舱x轴角位移仿真图;
具体实施方案
[0067]
本发明的实施对象为磁悬浮万向机动卫星平台,具体实施方案如图1所示,具体实施步骤如下:
[0068]
当磁悬浮载荷舱绕x轴和y轴偏转时,机动过程产生的控制力矩可以表示为:
[0069][0070]
其中t
α
为x轴控制力矩,t
β
为y轴控制力矩,α为载荷舱绕x轴的偏转角,β为载荷舱绕y轴的偏转角,j
x
为载荷舱径向转动惯量;
[0071]
由于载荷舱的机动通过偏转洛伦兹力磁轴承控制,偏转洛伦兹力磁轴承产生的控制力矩可以表示为:
[0072][0073]
其中n表示线圈匝数,b表示磁场强度大小,φ为洛伦兹力磁轴承的每组线圈对应的圆心角,lr为洛伦兹力磁轴承定子骨架半径,i
x
为x轴方向控制电流,iy为y轴方向控制电流,联立等式(1)和等式(2)可以得到:
[0074][0075]
通过(3)式可知,洛伦兹力磁轴承控制磁悬浮载荷舱的二个自由度是相互解耦的;
[0076]
(2)确定载荷舱洛伦兹力磁轴承偏转系统刚度阻尼特性
[0077]
当只有载荷舱偏转时,针对载荷舱绕x轴偏转自由度,载荷舱采用状态反馈控制,反馈控制信号采用:
[0078][0079]
其中k1和k2为状态反馈参数,则载荷舱绕x轴偏转自由度动力学方程可以表示为:
[0080][0081]
可以得到绕x轴偏转自由度的系统刚度为:
[0082][0083]
载荷舱绕x轴偏转自由度的系统阻尼为:
[0084][0085]
可以得到载荷舱绕x轴偏转自由度的系统阻尼比为:
[0086][0087]
载荷舱绕x轴偏转自由度的系统无阻尼固有频率为:
[0088][0089]
可以得到载荷舱绕x轴偏转自由度的系统有阻尼固有频率为:
[0090][0091]
由于参数对称特性,载荷舱绕y轴偏转自由度的相关参数与绕x轴偏转自由度相同;
[0092]
(3)确定激振幅值最小的机动路径
[0093]
当平台舱带动载荷舱进行机动时,为保持载荷舱随动的同时可以进行偏转控制,线圈电流应包含两部分,偏转电流is和机动电流im,于是惯性系下载荷舱绕x轴偏转自由度
系统可以表示为:
[0094][0095]
其中θ为惯性系下载荷舱绕x轴偏转角,则式(14)可以表示为:
[0096][0097]
可得:
[0098][0099]
设计航天器平台舱的机动角加速度指令为正弦型:
[0100][0101]
其中表示惯性系下平台舱机动角加速度,由频率特性可知,当指令频率等于载荷舱共振频率时,系统发生共振,即:
[0102][0103]
设机动总姿态角为ω,由(17)有:
[0104][0105]
则系统幅频特性为:
[0106][0107]
令航天器平台的最大机动角速度为为避免共振,机动角加速度应尽量远离共振频率,由式(20)可知,卫星以最大机动角速度恰好引起共振时,有:
[0108][0109]
经仿真验证,为了尽可能避免共振,机动策略可由下式给出:
[0110][0111]
其中
[0112]
2.为保证机动速度,系统应为欠阻尼或临界阻尼,即:
[0113]
[0114]
可得:
[0115][0116]
为兼顾机动速度和精度,λ应尽可能远离1,应尽可能接近1,经仿真可知,λ、满足如下条件时,机动速度和精度能够同时得到满足:
[0117][0118]
则k1和k2可通过如下方法确定:
[0119][0120]
载荷绕y轴偏转自由度的相关参数与绕x轴偏转自由度相同。
[0121]
在本体系下,未使用本发明所述机动路径设计方法的载荷舱x轴角位移仿真图如图3所示,采用本发明所述机动方法的载荷舱x轴角位移仿真图如图4所示,可以看出本发明所述的机动路径设计方法有着更好的姿态稳定度和机动速度。
[0122]
本发明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。