用于在外科钻孔术期间使用马达的状态以提高穿透算法的效率的系统
1.相关联申请的交叉引用
2.本专利申请要求于2019年10月11日提交的美国临时专利申请no.62/914,042的优先权和所有权益,该美国临时专利申请的公开内容被通过引用结合于此。
背景技术:
3.骨科手术中常用的做法是使用多种不同的手术工具来修复骨创伤、磨损引起的关节损伤、出生缺陷、疾病引起的损伤等。这种工具的非限制性示例是旋转切割的手持式手术器械,例如钻头。这些手持式手术器械用于出于许多不同的目的来形成钻孔,例如,放置螺钉以利用螺钉来修复骨折创伤,以便将固定器保持到位。这些外科手术的一个重要部分是确定待使用的螺钉的适当长度。
4.确定钻孔深度的典型方法使用呈深度计的形式的单独装置,该装置被引入到患者体内以测量钻孔的深度。该方案的两个显著缺点是1)在保持无菌的同时将另一手术器械引入到患者体内;以及2)延长手术时间,从而使患者暴露于周围环境。
5.这里提供的背景描述是出于概括地呈现本公开的上下文的目的。就在本背景技术部分中以及在提交时可能并不另外认定为现有技术的本说明书的多个方面中对其进行了描述而言,当前指定的发明人的工作既不明确地也不隐含地被认定为本公开的现有技术。
技术实现要素:
6.在一个特征中,描述了一种手持式手术系统。手持式手术系统包括器械、深度测量附件和控制器。该器械包括壳体和被定位在壳体内的马达。深度测量附件被可拆卸地联接到器械。深度测量附件包括第一传感器和第二传感器,该第一传感器被配置成在钻孔过程期间提供与马达的振动相关联的振动信号,该第二传感器被配置成在钻孔过程期间提供与钻头的位移相关联的位移信号。控制器被配置成接收振动信号和位移信号,使用算法基于振动信号确定马达的至少一个特性,并基于至少一个马达特性和位移信号确定穿透事件。
7.在一个特征中,描述了一种手术装置。该手术装置包括壳体、被定位在壳体内的马达、被配置成在钻孔过程期间产生与马达相关联的马达状态信号的第一传感器、被配置成在钻孔过程期间提供与钻头的位移相关联的位移信号的第二传感器。手术装置还包括控制器,该控制器被配置成接收马达状态信号和位移信号,基于马达状态信号使用预定算法确定马达的一个或多个特性,并基于马达的状态和位移信号确定穿透事件。
8.在一个特征中,描述了一种用于为手持式手术系统发送钻孔深度的深度测量附件。手持式手术系统包括器械,该器械包括壳体和被定位在壳体中的马达。深度测量附件包括被配置成在钻孔过程期间输出与马达相关联的马达状态信号的部件、被配置成在钻孔过程期间输出与钻头的位移相关联的位移信号的第二传感器。控制器被配置成接收马达状态信号和位移信号,基于马达状态信号确定马达是否产生旋转扭矩,并基于马达状态信号和位移信号确定穿透事件。
9.在一个特征中,描述了一种用于为手持式手术系统发送钻孔深度的深度测量附件。手持式手术系统包括器械,该器械包括壳体和被定位在壳体中的马达。深度测量附件包括被配置成在钻孔过程期间产生与钻头的位移相关联的位移信号的部件。深度测量附件还包括控制器,其被配置成接收位移信号,确定位移信号的频率分量,基于该频率分量确定马达是否产生旋转扭矩,以及基于该频率分量和该位移信号确定穿透事件。
10.在一个特征中,描述了一种手持式手术系统。手持式手术系统包括器械,该器械包括壳体、被定位在壳体中的马达、被可拆卸地联接到器械的深度测量附件。深度测量附件包括被配置成在钻孔过程期间输出与马达相关联的马达状态信号的部件、被配置成在钻孔过程期间输出与钻头的位移相关联的位移信号的位移传感器。深度测量附件还包括控制器,该控制器被配置成接收马达状态信号和位移信号,基于马达状态信号确定马达是否产生旋转扭矩,以及基于马达状态信号和位移信号确定穿透事件。
11.在一个特征中,描述了一种用于为手持式手术系统发送钻孔深度的深度测量附件。手持式手术系统包括器械,该器械包括壳体和被定位在壳体中的马达。深度测量附件包括第一传感器和第二传感器,该第一传感器被配置成在钻孔过程期间输出与马达的振动相关联的振动信号,该第二传感器被配置成在钻孔过程期间输出与钻头的位移相关联的位移信号。深度测量附件还包括控制器,该控制器被配置成接收振动信号和位移信号,基于振动信号确定马达是否产生旋转扭矩,以及基于振动信号和位移信号确定穿透事件。
12.在一个特征中,描述了一种手持式手术器械。该手持式手术器械包括:壳体;被定位在壳体中的马达,该马达被配置成在钻孔过程期间向钻头施加旋转扭矩;第一传感器,其被配置成在钻孔过程期间输出与马达相关联的马达状态信号;第二传感器,其被配置成在钻孔过程期间输出与钻头的位移相关联的位移信号。手持式手术器械还包括控制器,该控制器被配置成接收马达状态信号和位移信号,基于马达状态信号确定马达是否产生旋转扭矩,以及基于马达状态信号和位移信号确定穿透事件。
13.在一个特征中,描述了一种用于确定钻孔过程的穿透事件的方法。该方法包括利用第一传感器和第二传感器感测指示钻孔过程的一个或多个过程化事件和一个或多个非过程化事件的数据。这一个或多个过程化事件与钻头在马达产生旋转扭矩时相对于患者的骨头的移动相关联。这一个或多个非过程化事件与马达关闭时钻头相对于患者的骨头的移动相关联。该方法还包括确定数据是对应于一个或多个过程化事件还是一个或多个非过程化事件。该方法还包括基于与一个或多个过程化事件相关联的数据确定穿透事件。
14.在一个特征中,描述了一种用于使用深度测量附件来确定钻孔过程的穿透事件的方法,该深度测量附件用于为手持式手术系统发送钻孔深度。该手持式手术系统包括器械,该器械包括壳体和马达,该马达被配置成向被定位在该壳体中的钻头施加旋转扭矩。该深度测量附件包括部件、第二传感器和控制器。该方法包括利用部件在钻孔过程期间输出与马达相关联的马达状态信号,利用第二传感器在钻孔过程期间输出与钻头的位移相关联的位移信号,利用控制器接收马达状态信号和位移信号,利用控制器基于马达状态信号确定马达是否产生旋转扭矩,以及利用控制器基于马达状态信号和位移信号区段穿透事件。
15.本公开的其他应用领域将通过详细描述、权利要求书和附图而变得显而易见。详细描述和具体示例仅出于说明的目的,且并不旨在限制本公开的范围。
附图说明
16.根据详细描述和附图,本公开将得到更为充分的理解。
17.图1是根据本公开的教导的包括具有用于为骨头钻孔的深度测量附件的器械的手持式手术系统的透视图。
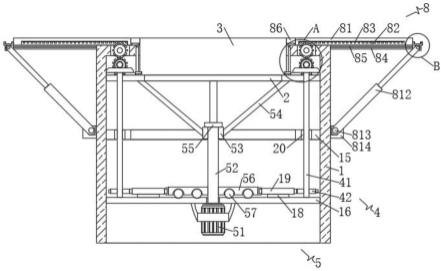
18.图2是根据本公开的教导的手持式手术系统的截面和局部透视图,其中,钻头被插入到其中。
19.图3是根据本公开的教导的手持式手术系统的示意图。
20.图4是根据本公开的教导的深度测量附件的局部分解视图。
21.图5是根据本公开的教导的手持式手术系统的透视图,该手持式手术系统具有与器械分离的深度测量附件。
22.图6是根据本公开的教导的手持式手术系统的透视图,该手持式手术系统具有与器械分离的深度测量附件。
23.图7是根据本公开的教导的对应于外科钻孔过程的位移信号的图形表示。
24.图8是根据本公开的教导的对应于外科钻孔过程的振动信号的图形表示。
25.图9是根据本公开的教导的时间块的频率范围上的频率图表的图形表示。
26.图10是根据本公开的教导的时间块的较窄频率范围上的频率图表的图形表示。
27.图11是由根据本公开的教导的手持式手术系统的控制器执行的示例性流程图。
28.图12-14是由根据本公开的教导的手持式手术系统的控制器执行的示例性流程图。
29.在附图中,可以重复使用附图标记来标识相似和/或相同的元件。
具体实施方式
30.参考图1-5,示出了用于执行外科钻孔术的手持式手术系统100。手持式手术系统100消除了对诸如深度计之类的第二装置来确定钻孔深度的必要性。手持式手术系统100包括手持式手术器械104和切割工具108,例如钻头。在2016年9月1日提交的名为“带有包括在钻头上滑动的探针的集成式深度计的电动手术钻(powered surgical drill with integral depth gauge that includes a probe that slides over a drill bit)”的国际专利公布文献no.wo2017/040783a1和2018年8月17日提交的名为“用于测量钻孔深度和相关联附件的手术机头(surgical handpiece for measuring depth of bore holes and relates accessories)”的国际专利公开文献no.wo2019/035096a1中讨论的手持式手术器械被全部通过引用结合于此。
31.手持式手术系统100被配置成确定由切割工具108钻出的钻孔的深度。手持式手术系统100还可被配置成基于钻孔的深度确定用于骨固定的适用螺钉长度。可以在骨钻孔过程已经完成之后立即进行螺钉长度确定。手持式手术器械104可包括壳体112和被设置在壳体112内的马达114。壳体112可具有手枪握把形状或其他适用的形状。
32.图2和图3示出了沿着近侧/远侧轴线ax定位在壳体112内的马达114,但是可以设想到其他马达位置。马达114可以是电动的、气动的或液压的。马达114被配置成响应于从控制器(例如第二控制器162)接收到的命令、信号等选择性地产生旋转扭矩。马达114包括转子套管115,该转子套管115由一对轴承117支撑以围绕轴线ax旋转。与齿轮组(图3中未示
出)相邻布置的驱动齿轮(图3中未示出)被联接到转子套管115并与转子套管115同时旋转,并用于将旋转扭矩传递到该齿轮组。例如,在公开文献wo2017/040783a1和wo2019/035096a1中讨论的马达114和/或齿轮组配置可被用作用于手持式手术系统100的马达114。
33.手持式手术系统100可以包括深度测量附件116,其被可拆卸地联接到壳体112或与壳体112一体地形成。深度测量附件116可以包括不同的壳体,例如模块壳体120。深度测量附件116可被以使对外科医生对手术部位的视野的阻碍最小化的方式构建而成。深度测量附件116可还包括第一传感器124(例如位移传感器),其被可操作地连接到深度测量延伸部128。如所示,深度测量延伸部128是套管。第一传感器124被配置成在深度测量延伸部128相对于手持式手术器械104移动时输出位移信号164。在一些配置中,深度测量延伸部128具有被设置在切削工具108的上方的内表面132。尽管在该示例中,深度测量延伸部128被同心地定位在切削工具108的上方,但是在替代配置中,深度测量延伸部128和切削工具108不必被同心地定位。在其他配置中,第一传感器124可以是深度传感器(例如,激光传感器),其被配置成在钻头相对于骨头移动时输出位移信号164。第一传感器124可并不被容纳在深度测量附件116内并且可以例如被附接至手持式手术器械104。
34.在一个示例中,深度测量附件116可以包括可旋转齿轮136。在这种示例中,深度测量延伸部128具有一组齿条齿140,这一组齿条齿140被纵向地布置在其长度的至少一部分上,这一组齿条齿140通过与可旋转齿轮136上的齿啮合而接合该可旋转齿轮136上的齿。通过齿条齿140和可旋转齿轮136上的齿的接合,由深度测量延伸部128的任何轴向移动来操作在功能上被联接到第一传感器124的可旋转齿轮136。在这个非限制性示例中,第一传感器124是电位器。可以使用其他类型的传感器,例如,光学传感器、lvdt传感器等。
35.参考图4,为了确保深度测量延伸部128和第一传感器124的功能正常,深度测量延伸部128可被朝向延伸位置偏压。通过这种偏压,深度测量延伸部128的远端总是与待钻孔的骨的近侧表面或邻接待钻孔的骨的板/植入物保持接触。这种偏压通过使用弹簧160来实现,该弹簧160偏压可旋转齿轮136,从而使齿轮沿着使深度测量延伸部128向远侧延伸出该模块壳体120的方向旋转。然而,设想到了相对于手持式手术器械104偏压深度测量延伸部128的其他方式。第一传感器124被可操作地连接到深度测量延伸部128,使得第一传感器124被配置成在第一时间间隔168期间提供位移信号164,下文将对其更详细地讨论。
36.返回参考图3,深度测量附件116可还包括第二传感器142,该第二传感器142被配置成输出指示马达状态的信号。例如,第二传感器142可以对应于加速度计并且可被配置成输出指示马达114的振动的振动信号,具体地对应于马达114的转子的不平衡的振动信号。在图2和图4中,第二传感器142被示出为被设置在深度测量附件116的内部;然而,第二传感器142可被定位于任何其他适用的位置,例如手持式手术器械104的内部。
37.参考图4和图5,深度测量附件116可以包括被可操作地连接到第一传感器124和第二传感器142的第一控制器144。第一控制器144可被配置成基于位移信号164和振动信号166确定穿透事件。该穿透事件可以对应于钻头的远端已经突出穿过患者骨头的远侧皮质壁的时间。基于这个时间,第一控制器144可以通过位移信号164确定对应的位移。
38.手持式手术器械104可还包括控制手持式手术器械104的马达114的操作的第二控制器162。尽管第一控制器144和第二控制器162被示出为单独的控制器,第一控制器144被示出为被布置在深度测量附件116内并且第二控制器162被设置在手持式手术器械104中,
但第一控制器144或第二控制器162可被容纳在远程装置中。在不存在单独的深度测量附件116的情况下,第一控制器144和第二控制器162也可被集成到单个控制器中。
39.深度测量附件116可以包括壳体连接器150,该壳体连接器150被配置成与手持式手术器械104的器械连接器152可操作地连接。在一个示例中,手持式手术器械104可以仅经由器械连接器152与壳体连接器150之间的连接向深度测量附件116提供电力信号(电源连接)。第二传感器142被设置在深度测量附件116内的配置允许深度测量附件116能够确定与马达114相关联而无需连接到手持式手术器械104的第二控制器162的一个或多个状况,例如马达114的状况或状态。
40.在另一示例中,深度测量附件116和手持式手术器械104还可以经由器械连接器152和壳体连接器150交换数据。第一控制器144和第二控制器162可以通过彼此间或与其他装置的有线连接(即,通过壳体连接器150和器械连接器152)或无线连接进行通信。可以通过位于第一控制器144和第二控制器162上的收发器来促进无线通信。这些无线通信收发器可以支持诸如wi-fi、蓝牙或其他类似的无线通信协议之类的协议。例如,第一控制器144和第二控制器162可以将数据发送到可以包括第二收发器的诸如平板电脑或外部服务器之类的远程装置。
41.深度测量附件116还可以包括显示器156(例如显示屏、一个或多个发光二极管(led)等),以向外科医生提供与深度插管的移动有关的信息,从而显示实时钻孔深度、所记录的历史最大钻孔深度、螺钉长度、穿透指示、皮质钻孔深度、钻孔深度等。该相同信息也可以被利用扬声器传送给用户,以便提供对于实时钻孔深度、所记录的历史最大钻孔深度、穿透指示等的音频指示。
42.深度测量附件116可以包括用户输入装置(未示出),例如被安装到模块壳体120并且被操作性地连接到第一控制器144、第一传感器124和/或第二传感器142的一个或多个按钮。用户输入装置可以控制第一传感器124和/或第二传感器142的操作。例如,用户输入装置可被用于复位、归零或启动使第一传感器124或第二传感器142启动的信号,从而向第一控制器144提供位移数据或振动数据。
43.参考图7,第一时间间隔168对应于外科钻孔过程。第一时间间隔168由初始时刻(t
i1
)和最终时刻(t
f1
)限定。用户输入装置可被用于开始第一时间间隔168,换言之,设定初始时刻(t
i1
)。也就是说,(t
i1
)是外科医生将钻头放置到位以开始钻孔术并接合用户输入装置的时刻,而(t
f1
)是外科医生在执行特定的骨钻孔之后完全缩回该钻头,使得深度测量延伸部128返回其起始位置的时刻。在对应于起始位移的(t
i1
),深度测量延伸部128尚未被相对于手术器械104移位。在替代配置中,第一时间间隔168可以响应于马达114产生旋转扭矩而开始或基于深度测量延伸部128的移动。
44.可以基于系统时钟信号来收集位移数据,在系统的非限制性示例中,时钟信号是控制器的处理器的内部时钟信号或来自单独的时钟装置的时钟信号。系统时钟信号被用于限定在产生位移信号164的第一时间间隔168期间收集和分度该位移数据的采样率。所设想到的是,采样率可以是固定的,或者作为选择,采样率可以是可变的或依赖于过程的。
45.虽然本发明的图示实施例将第二传感器142示出为加速度计,但可以采用多种其他部件来感测指示马达114的状态(即,马达114是否正在产生旋转扭矩)或该器械外部的马达速度。在替代配置中,深度测量附件116可以包括天线而非第二传感器142。利用这种配
置,天线可被配置成在马达114产生旋转扭矩时接收由马达114产生的一个或多个无线电波。天线可以被配置成基于从马达114发射的一个或多个无线电波输出电压信号或电流信号。第一控制器144可以被配置成接收电压信号或电流信号并基于接收到的一个或多个无线电波输出马达状态信号。第一控制器144可以包含信号处理电路,该信号处理电路被配置成处理来自天线的信号并产生该马达状态信号。第一控制器144可然后基于马达状态信号确定马达114是否正在产生旋转扭矩。
46.在另一配置中,第二传感器142可以对应于光学传感器,该光学传感器被配置成例如在使钻头围绕轴线ax旋转时检测钻头的光学特性。基于钻头的光学特性,光学传感器可以输出马达状态信号。例如,基于在钻头旋转时的光学特性的位置变化,马达状态信号的证据,第一控制器144可以确定马达正在产生旋转扭矩。在2020年5月15日提交的名为“具有旋转场钻头标识的动力手术钻(powered surgical drill having rotating field bit identification)”的国际申请no.pct/us2020/033288中讨论了用于检测钻头的光学特性的光学传感器的配置的更多细节,该申请被通过引用全部结合于此。光学传感器可以包括:光源(例如发光二极管(led)),该光源被配置成将光发射到钻头上;以及传感器,其用以测量钻头的光反射率。在一些配置中,钻头可包括光学特性,例如激光标记或被配置成改变从光源发射的光的参数的另一可区分标记。
47.在另一配置中,第二传感器142可以对应于被配置成在使钻头围绕轴线ax旋转时检测由钻头发射的磁场的传感器,例如磁场传感器、霍尔效应传感器或磁阻传感器。在这种配置中,钻头可以包括一个或多个磁体或被配置成发射磁场的其他特征。第二传感器142可以被配置成基于检测到的磁场来确定马达状态信号。基于该马达状态信号,第一控制器144可以被配置成确定马达114是否正在产生旋转扭矩。例如,如果磁场正在变化,则第一控制器144可以确定马达114正在产生旋转扭矩。
48.在另一配置中,第二传感器142可以对应于音频传感器,该音频传感器被配置成检测由马达114发出的声波(例如,在马达114正在产生旋转扭矩时发出的声波)的特性。在一些配置中,音频传感器可以对应于麦克风或另一适用的机电换能器。音频传感器可以被配置成基于声波的特性来确定马达状态信号。基于该马达状态信号,第一控制器144可以被配置成确定马达114是否正在产生旋转扭矩。例如,第一控制器144可以存储由马达114产生的前一声波的一个或多个特性,并使用所存储的特性来确定马达状态信号是否代表马达114正在产生旋转扭矩。
49.在另一配置中,第二传感器142可以对应于被配置成检测电力信号的电压的电压传感器。如前所讨论的那样,深度测量附件116的壳体连接器150可以接收来自器械连接器152的电力信号。当马达114产生旋转扭矩时,电力信号的电压将包括噪声分量,当马达114并未正在产生旋转扭矩时,不存在该噪声分量。因此,第一控制器144可以基于电力信号的电压来确定马达114是否正在产生旋转扭矩。
50.在另一配置中,可以省略第二传感器142。在该配置中,第一控制器144可以被配置成确定位移信号164的频率分量。例如,第一控制器144可以通过执行位移信号164的傅里叶变换来确定频率分量。与正在产生旋转扭矩的马达114相关联的特定频率分量可以存在于当马达114不产生旋转扭矩时不存在的位移信号164中。因此,第一控制器144可以被配置成基于所确定的频率分量来确定马达114是否正在产生旋转扭矩。
51.在另一配置中,电流传感器或其他传感器类型可被用于确定马达114的状态。在这种示例中,基于电流传感器消耗(draw),第一控制器144可确定马达114是否正在产生旋转扭矩。在这种配置中,来自手持式手术器械104中的电流传感器的数据必须被传送到第一控制器144。这可被通过有线或无线连接经由第二控制器162传送到第一控制器144。
52.在另一配置中,传感器可以监测并产生表示马达114的转子的旋转位置的输出信号。能够产生表示该转子旋转位置的信号的一个这种传感器是霍尔效应传感器。霍尔效应传感器产生随感测到的磁场而变化的信号。马达114的转子附近的磁场是转子的旋转位置的函数。其他传感器可以根据马达114的运行速率、马达114的部件的温度或施加在马达114上的电压来产生传感器信号。
53.如图4所示,第二传感器142可以是包括x轴161、y轴165和z轴163的三轴加速度计;然而,所设想到的是,第二传感器142也可以是双轴加速度计。加速度计数据指示马达114的转子的固有不平衡。与正交于旋转轴线ax的轴线相比,与马达114的旋转轴线ax平行的轴线对马达114的振动的敏感度较低。根据第二传感器142的取向和位置,与其他轴中的至少一个相比,x轴161、y轴165或z轴163中的至少一个对马达114的转子的不平衡可能更为敏感。在图4中,x轴161被示出为与马达114的旋转轴线ax平行,而y轴165和z轴163被示出为与马达114的旋转轴线ax正交。所设想到的是,第二传感器142可被以不同的方式定位或定向,使得y轴165或z轴163平行于马达114的旋转轴线ax并且x轴正交于马达114的旋转轴线ax。在一些情况下,第一控制器144可以基于振动数据来执行算法以确定转子的不平衡是否高于某个阈值,或者基于振动数据来执行算法以确定哪个轴线对转子的不平衡最为敏感。
54.第一控制器144可以以多种方式过滤该振动数据。例如,可以使用低通滤波器或高通滤波器来滤除不需要的低频或高频噪声。滤波器可以由一个或多个滤波器电路或通过软件来实现。基于振动数据,第一控制器144产生振动信号166。例如,当第二传感器142是加速度计时,振动信号166可以包括x轴分量、y轴分量和z轴分量。如前所讨论的那样,根据x轴161、y轴165和z轴163的取向,x轴分量、y轴分量和z轴分量中的至少一个将是对马达114的振动最为敏感的。
55.可以基于第一控制器144或第二控制器162的处理器的内部时钟信号或来自单独装置(例如与第二传感器142相关联的时钟装置)的时钟信号收集振动数据(或用于第二传感器142的替代配置的其他马达状态数据)。时钟信号限定了在产生振动信号166(或用于替代配置的马达状态信号)的第二时间间隔169上收集或分度振动测量值(或用于替代配置的马达状态测量值)的采样率。所设想到的是,采样率可以是固定的,或者作为选择,采样率可以是可调节的或者是取决于过程的。在一些情况下,如图7所示,第二时间间隔169可以对应于第一时间间隔168。在其他情况下,第二时间间隔169可以具有第二初始时刻(t
i2
)和与第一初始时刻(t
i1
)和第一最终时刻(t
f1
)不同的第二最终时刻(t
f2
)。在任何情况下,第二时间间隔169的至少一部分与第一时间间隔168的一些部分重叠。
56.继续参考图7和图8,第一控制器144可以基于振动信号166使用一种或多种算法来确定马达114的状态。这一种或多种算法可以在第五时间间隔184期间是基于z轴分量的。第五时间间隔184可被设定为任何适用的时间间隔。第一控制器144可以将第一时间间隔168和/或第二时间间隔169除以第五时间间隔184以建立时间块。对于第二时间间隔169中的每个时间块,第一控制器144可以在该时间块期间基于振动信号166来确定马达114的状态。
57.例如,第一控制器144可以将z轴分量在第五时间间隔184期间的频率与第一阈值进行比较,以便识别马达是处于第一状态还是第二状态。第二状态可对应于马达114开启且正在产生旋转扭矩,而第一状态可对应于马达114关闭且不产生旋转扭矩。第一阈值可以从马达114的速度导出,使得超过第一阈值表示马达114在第一阈值下从第一状态转变到第二状态。
58.可以基于在时间块上的振动信号166的多个增加边缘186和减少边缘188来确定频率。如图8所示,在时间块上增加边缘186和减少边缘188的数量为22。第一控制器144可被配置成忽略低于第二阈值180的z轴分量的出现。在一些情况下,第一控制器144可以推迟识别马达114处于第二状态,直到z轴分量的频率大于第一阈值持续三个连续间隔。在这种情况下,第一控制器144可以包括计数器,该计数器每当z轴分量的频率大于第一阈值时就递增。一旦计数器大于第三阈值(例如,三),第一控制器144就可识别马达114处于第二状态。第三阈值可以是可调整的。第一控制器144可以标记频率大于第一阈值但计数器尚未达到第二阈值的时间块。例如,如果计数器具有大于零的值但z轴分量的频率在计数器达到第三阈值之前下降到低于第一阈值,则第一控制器144确定马达114处于第一状态并为计数器清零。
59.在另一示例中,第一控制器144可以被配置成基于振动信号166在时间块上的傅里叶变换来确定马达在该时间块内是处于第一状态还是第二状态。例如,第一控制器144可以针对每个时间块确定振动信号166的z轴分量的短时傅里叶变换。该短时傅里叶变换可被利用快速傅里叶变换(fft)或其他适用的算法予以确定。参考图9,示出了振动信号166在相应时间块上的傅里叶变换的频率曲线图。在图9中,示出了全范围的频率仓。频率仓的范围由最小频率仓(f
min
)和最大频率仓(f
max
)限定。每个频率仓的宽度可由等式1限定:
60.(等式1)bw=sf/ts61.其中,bw表示仓宽度,sf表示采样频率,并且ts表示样本总数。
62.第一控制器144可以被配置成调整频率仓的范围,使得在针对时间块确定马达状态时不考虑较高频率(例如,大于330赫兹的频率)和较低频率(小于50赫兹的频率)。在图10中,示出了具有经调整的频率范围的傅立叶变换的频率曲线图。频率范围由经调整的最小频率仓(a
min
)和经调整的最大频率仓(a
max
)界定。
63.对于每个频率仓,第一控制器144可以将频率仓的幅值与最小幅值阈值191进行比较。如果频率仓的幅值大于最小幅值阈值191,则第一控制器144可以随后将该频率仓的幅值与满足最小幅值阈值191条件的其他仓进行比较。当第一控制器144针对两个连续的时间块确定频率仓相同时,第一控制器144可以确定该马达被针对这些连续的时间块和任何标记的时间块设定为第二状态。当第一控制器144针对时间块确定没有频率仓具有大于最小幅值阈值191的幅值时,第一控制器144可以确定马达114被针对该时间块设定为第一状态。
64.设想到了基于位移信号164随时间变化的图像确定穿透事件(即,钻头穿透远侧皮质壁的穿透时间(tb))的多种穿透算法。第一控制器144可以基于位移信号164和振动信号166实施多种穿透算法以确定穿透时间(tb)。第一控制器144可以被配置成基于位移信号164(例如速度相关联信号和加速度相关联信号)推导出和存储其他信号。基于起始位移和穿透时间(tb),第一控制器144可以确定穿透时间(tb)处的对应的穿透位移。
65.可以通过例如当外科医生钻穿该骨头时,主要收集仅与过程化位移(例如在实际手术钻孔过程期间的深度测量延伸部128的位移)相关联的数据来优化穿透算法。当深度测
量延伸部128在马达114被关闭或正以非切割速度运行并且外科医生实际上并未钻穿骨头时发生非过程化位移。导致非过程化位移的非过程化事件可以致使位移信号164模仿第一控制器144与穿透时间(tb)相关联的图像。由此,第一控制器144可能在位移信号164的这些非过程化位移部分中的一个期间错误地识别穿透时间(tb)。可能难以使用现有穿透检测算法来区分位移信号164的非过程化位移与该位移信号164的过程化位移;因此,用于区分非过程化位移和过程化位移的附加系统和方法可以提高穿透检测的准确性。当算法需要主要仅处理过程化数据时,手持式手术系统100还可以呈现出改进的用于穿透检测的处理时间。
66.第一控制器144还可以被配置成通过位移信号164或从位移信号164导出的其他信号(例如速度相关联信号或加速度相关联信号)确定一个或多个过程化事件(即,与过程化位移相关联的事件)。一个或多个过程化事件还可以指代通过位移信号164确定的加速度、位移和/或速度(例如,具有超过预定阈值的值的最大位移、局部最大位移、最小位移、局部最小位移、最大加速度、局部最大加速度、最大速度、局部最大速度、最小速度、局部最小速度和斜率)的变化。
67.非过程化位移可能是意外事件的结果。意外事件可以包括深度测量延伸部128的手动操作。手动操作可能是无意的并且当外科医生或其他医务人员在钻孔术开始之前、在钻孔术期间或在钻孔术之后,当马达114关闭时,使深度测量延伸部128移位时发生。
68.马达114的状态可被用于区分过程化位移和非过程化位移。在图7中,在第三时间间隔174期间指示过程化位移,而在第四时间间隔176期间示出了非过程化位移。第一控制器144可以基于振动信号166和位移信号164确定和存储与钻孔术相关联的一个或多个事件。这一个或多个事件可以包括但不限于马达114在整个钻孔术期间的状态、马达114在整个钻孔术期间的速度、起始位移、穿透位移、穿透时间(tb)、钻孔开始时间和钻孔结束时间。第一控制器144可以基于与外科钻孔术相关联的一个或多个事件来确定钻孔深度,然后随后基于钻孔长度确定用于固定到骨头的适用的螺钉长度。
69.参考图11,方法800可以由第一控制器144执行。在804处,方法800开始于第一控制器144接收位移数据和振动数据的位置。在808处,第一控制器144确定第一时间间隔168期间的位移信号164。在812处,第一控制器144确定第二时间间隔169期间的振动信号166。在814处,第一控制器144通过将第二时间间隔169除以第五时间间隔184来建立时间块并且方法800在816处继续。在816处,第一控制器144将指示器位置设定到第二时间间隔169的第一时间块并且方法800在824处继续。
70.在824处,第一控制器144确定z轴分量在时间块上的频率并且控制继续到828。在828处,第一控制器144确定该时间块的z轴分量的频率是否大于第一阈值。如果是,则方法800继续到832;否则,方法800继续到844。在844处,第一控制器144确定马达114被针对该时间块设定为第一状态,并且方法800在852处继续。在832处,第一控制器144使计数器递增并且方法800继续到836。
71.在836处,第一控制器144将计数器的值与第二阈值进行比较。如果计数器的值大于第二阈值,则方法800在848处继续;否则,方法800继续到840。在840处,第一控制器144标记该时间块并且方法800返回到820处继续。在820处,第一控制器144将指示器位置递增到下一时间块并且方法800返回到824继续。
72.在848处,第一控制器144确定将马达114设定为第二状态并且方法800继续到852。
在852处,第一控制器144将计数器清零并清除标记。在856处,第一控制器144确定当前时间块是否是第二时间间隔169中的最后一个时间块。如果是,方法800在857处继续;否则,方法800返回到820继续。在857处,第一控制器144确定是否将时间块中的任一个的马达114的状态设定为第二状态。如果是,则该方法在858处继续;否则,该方法可能结束。
73.在858处,第一控制器144基于马达114的状态和位移信号164确定穿透事件(即,穿透时间(tb)),并且方法800在860处继续。在860处,第一控制器144基于深度测量延伸部128在穿透时间(tb)处的位移确定钻孔深度,并且方法800在864处继续。在864处,第一控制器144基于钻孔深度确定螺钉长度。在868处,第一控制器144将螺钉长度传送到显示器156。虽然所提供的示例是控制器中的一个传送螺钉长度以在显示器156上显示,但是第一控制器144可以将螺钉长度传送到另一控制器(例如与远程装置相关联的控制器),使得该远程装置可以显示该螺钉长度。
74.参考图12,方法900可以由第一控制器144执行。在904处,方法900始于第一控制器144接收位移数据和振动数据的位置。在908处,第一控制器144确定第一时间间隔168期间的位移信号164。在912处,第一控制器144确定第二时间间隔169期间的振动信号166。在916处,第一控制器144通过将第二时间间隔169除以第五时间间隔184来创建时间块并且方法900在916处继续。在916处,第一控制器144将指示器位置设定到第一时间块并且方法900在图12的924处继续。
75.在924处,第一控制器144在该时间块期间执行振动信号166的傅里叶变换。在926处,第一控制器144调整频率仓范围。在928处,第一控制器144将指示器位置设定到具有经调整的频率范围的第一仓,并且方法900在936处继续。在936处,第一控制器144确定频率仓的幅值是否大于该仓的最小幅值阈值191。如果是,控制在940处继续;否则,控制在930处继续。在940处,第一控制器144确定当前仓是否是处于幅值大于最小幅值阈值191的范围中的第一仓。如果是,则控制可以在944处继续;否则,控制可以在948处继续。在944处,第一控制器144将仓设定为具有相关联幅值的最大_仓(max_bin)。在946处,第一控制器144确定该仓是否是处于该频率范围中的最后一个仓。如果是,控制在956处继续;否则,控制返回到932处继续。
76.在930处,第一控制器144确定该仓是否是处于该频率范围中的最后一个仓。如果是,则方法900在931处继续。否则,方法900在932处继续。在931处,第一控制器144确定是否已经设定最大_仓。如果是,控制在956处继续;否则,控制返回到图14的976处继续。在932处,第一控制器144将指示器位置递增到下一个仓并且控制继续到936。
77.在948处,第一控制器144确定该仓的大小是否大于最大_仓的大小。如果是,控制在944处继续;否则控制在952处继续。在952处,第一控制器144确定该仓是否是处于频率范围中的最后一个仓。如果是,则方法900在956处继续;否则,方法900在932处继续。在956处,第一控制器144设定该时间块的马达_状态_频率,并将其存储到与最大_仓相关联的频率仓。在960处,第一控制器将该最大_仓清零。在964处,第一控制器144确定时间块的马达_状态_频率是否匹配前一时间块的马达_状态_频率。如果是,则方法900在图14的972处继续;否则,方法900在968处继续。在968处,第一控制器144标记该时间块并且方法900在984处继续。
78.在972处,第一控制器144确定针对该时间块和任何标记时间块将马达114设定为
第二状态,并且方法900继续到980。在976处,第一控制器144确定针对该时间块将马达114设定为第一状态并且方法900继续到980。在980处,第一控制器144清除标记。在984处,第一控制器144确定该时间块是否是第二时间间隔169中的最后一个时间块。如果是,则方法900在987处继续;否则,方法900在986处继续。在986处,第一控制器144将指示器位置递增到下一个时间块,并且方法900返回到图13的924处继续。在987处,第一控制器144确定是否针对时间块中的任一个将马达114的状态设定为第二状态。如果是,则方法900在988处继续;否则,方法900可以结束。
79.在988处,第一控制器144基于马达114的状态和位移信号164确定穿透事件(即,穿透时间(tb)),并且方法900在992处继续。在992处,第一控制器144基于深度测量延伸部128在穿透时间(tb)处的位移确定钻孔深度,并且方法900在996处继续。在996处,第一控制器144基于钻孔深度确定螺钉长度。在998处,第一控制器144将螺钉长度传送到显示器156。虽然所提供的示例是控制器中的一个传送螺钉长度以在显示器156上显示,但是第一控制器144可以将螺钉长度传送到另一控制器(例如与远程装置相关联的控制器),使得该远程装置可以显示螺钉长度。
80.条款
81.条款1
–
一种用于确定适用于骨固定的螺钉长度的手持式手术系统,该手持式手术系统包括:壳体;位于壳体中的马达;深度测量附件,其被可拆卸地联接到壳体,该深度测量附件包括:第一传感器,其被配置成提供对应于钻孔过程的位移信号;和第二传感器,其被配置成提供与对应于钻孔过程的马达的振动相关联的振动信号;以及控制器,其被配置成:接收振动信号和位移信号;以及(i)使用算法,基于振动信号确定与马达相关联的一个或多个特性,(ii)基于与马达相关联的一个或多个特性和位移信号确定穿透事件,以及(iii)基于穿透事件和位移信号确定适用的螺钉长度。
82.条款2
–
一种手术装置,包括:壳体;位于壳体内的马达;第一传感器,其被配置成在钻孔过程期间产生与马达相关联的马达状态信号;第二传感器,其被配置成在钻孔过程期间提供与钻头的位移相关联的位移信号;以及控制器,其被配置成:接收马达状态信号和位移信号;使用预定算法,基于马达状态信号确定马达的一个或多个特性;并基于马达的状态和位移信号确定穿透事件。
83.条款3
–
如条款2所述的手术装置,其中,马达的一个或多个特性包括马达的状态和马达的速度。1-1
84.条款4
–
如条款2所述的手术装置,其中,控制器被进一步配置成基于穿透事件和位移信号计算适用的螺钉长度。
85.条款5
–
一种用于为手持式手术系统发送钻孔深度的深度测量附件,其中,该手持式手术系统包括器械,该器械包括壳体和定位在壳体中的马达,该深度测量附件包括:被配置成在钻孔过程期间产生与钻头的位移相关联的位移信号的部件;以及控制器,其被配置成:接收位移信号;确定位移信号的频率分量;基于频率分量确定马达是否产生旋转扭矩;以及基于频率分量和位移信号确定穿透事件。
86.条款6
–
一种手持式手术系统,包括:器械,其包括:壳体;以及定位在壳体中的马达;深度测量附件,其被可拆卸地联接到该器械,该深度测量附件包括:被配置成在钻孔过程期间输出与马达相关联的马达状态信号的部件;和位移传感器,其被配置成在钻孔过程
期间输出与钻头的位移相关联的位移信号;以及控制器,其被配置成:接收马达状态信号和位移信号;基于马达状态信号确定马达是否产生旋转扭矩;以及基于马达状态信号和位移信号确定穿透事件。
87.条款7
–
一种用于为手持式手术系统发送钻孔深度的深度测量附件,其中,该手持式手术系统包括器械,该器械包括壳体和定位在壳体中的马达,该深度测量附件包括:第一传感器,其被配置成在钻孔过程期间输出与马达的振动相关联的振动信号;和第二传感器,其被配置成在钻孔过程期间输出与钻头的位移相关联的位移信号;和控制器,其被配置成用于:接收振动信号和位移信号;基于振动信号判断马达是否产生旋转扭矩;以及基于振动信号和位移信号确定穿透事件。
88.条款8
–
一种手持式手术器械,包括:壳体;和定位在壳体中的马达,该马达被配置成在钻孔过程期间向钻头施加旋转扭矩;第一传感器,其被配置成用于在钻孔过程期间输出与马达相关联的马达状态信号;和第二传感器,其被配置成用于在钻孔过程期间输出与钻头的位移相关联的位移信号;以及控制器,其被配置成用于:接收马达状态信号和位移信号;基于马达状态信号确定马达是否产生旋转扭矩;以及基于马达状态信号和位移信号确定穿透事件。
89.条款9
–
一种用于确定钻孔过程的穿透事件的方法,该方法包括:利用第一传感器和第二传感器感测指示钻孔过程的一个或多个过程化事件和一个或多个非过程化事件的数据,其中:一个或多个过程化事件与钻头在马达产生旋转扭矩时相对于患者骨头的移动相关联,并且一个或多个非过程化事件与钻头在马达关闭时相对于患者骨头的移动相关联;确定数据是否对应于一个或多个过程化事件或一个或多个非过程化事件;以及基于与一个或多个过程化事件相关联的数据确定该穿透事件。
90.条款10
–
一种用于利用用于为手持式手术系统发送钻孔深度的深度测量附件确定钻孔过程的穿透事件的方法,该手持式手术系统包括具有壳体和马达的器械,该马达被配置成将旋转扭矩施加到被定位在壳体中的钻头,该深度测量附件包括部件、第二传感器和控制器,该方法包括:在钻孔过程中,利用该部件输出与马达相关联的马达状态信号;利用第二传感器在钻孔过程期间输出与钻头的位移相关联的位移信号;以及利用控制器接收马达状态信号和位移信号;利用控制器基于马达状态信号确定马达是否章产生旋转扭矩;利用控制器基于马达状态信号和位移信号确定该穿透事件。
91.前述描述本质上仅是说明性的,决不旨在限制本公开、其应用或用途。本公开的广泛教导可被以多种形式实施。因此,虽然本公开包括具体示例,但本公开的真实范围不应如此限制,因为其他修改将在研究附图、说明书和所附权利要求书后而变得显而易见。应当理解,方法内的一个或多个步骤可被以不同的顺序(或同时)执行而不改变本公开的原理。此外,尽管每个示例在上面都被描述为具有某些特征,但是结合本公开的任何示例描述的那些特征中的任一个或多个均可以在任何其他示例中实现和/或与任何其他示例的特征相组合,即使该组合并未被明确描述。换言之,所描述的示例并不是相互排斥的,并且一个或多个示例彼此间的排列保持处于本公开的范围内。
92.元件之间(例如,控制器、电路元件、半导体层等之间)的空间和功能关系被使用多种术语予以描述,这些术语包括“连接”、“接合”、“联接”、“相邻”、“旁边”、“在上面”、“上方”、“下方”和“放置”。除非被明确描述为“直接”,否则当在上述公开中描述第一元件和第
二元件之间的关系时,该关系可以是直接关系,其中,在第一元件和第二元件之间不存在其他中间元件,但也可以是间接关系,其中,在第一元件和第二元件之间存在一个或多个中间元件(空间上或功能上)。
93.如本文所用,短语a、b和c中的至少一个应被解释为表示使用非排他性逻辑或的逻辑(a or b or c),而不应被解释为表示“a中的至少一个、b中的至少一个以及c中的至少一个。”术语子集并不必然需要适当的子集。换言之,第一集合的第一子集可以与第一集合共延(等于第一集合)。
94.在图中,如由箭头所指的箭头方向通常展示出图示中所关注的信息流(例如数据或指令)。例如,当元件a和元件b交换各种信息但从元件a传送到元件b的信息与图示相关时,箭头可能从元件a指向元件b。该单向箭头并不意味着没有其他信息从元件b发送到元件a。此外,对于从元件a发送到元件b的信息,元件b可以向元件a发送对信息的请求或接收对信息的确认。
95.在本技术中,包括以下定义,术语“控制器”可被替换为术语“电路”。术语“控制器”可以指代、属于或包括:专用集成电路(asic);数字、模拟或混合模拟/数字分立电路;数字、模拟或混合模拟/数字集成电路;组合逻辑电路;现场可编程门阵列(fpga);执行代码的处理器电路(共享、专用或组群);存储由处理器电路执行的代码的存储器电路(共享、专用或组群);提供所述功能的其他适用的硬件部件;或上述中的一些或全部的组合,例如在片上系统中。
96.控制器可以包括一个或多个接口电路。在一些示例中,接口电路可以实现连接到局域网(lan)或无线个域网(wpan)的有线或无线接口。lan的示例是电气和电子工程师协会(ieee)标准802.11-2016(也被称为wifi无线网络标准)和ieee标准802.3-2015(也被称为ethernet有线网络标准)。wpan的示例是来自蓝牙技术联盟(bluetooth special interest group)的bluetooth无线网络标准和ieee标准802.15.4。
97.控制器可以使用接口电路与其他控制器通信。尽管在本公开中可以将控制器描述为直接与其他控制器进行逻辑通信,但是在多种实施方式中,控制器实际上可以经由通信系统进行通信。通信系统包括物理和/或虚拟网络装置,例如集线器、交换机、路由器和网关。在一些实施方式中,通信系统连接到或穿越诸如互联网之类的广域网(wan)。例如,通信系统可以包括使用包括多协议标签交换(mpls)和虚拟专用网络(vpn)在内的技术通过互联网或点对点租用线路相互连接的多个lan。
98.在多种实施方式中,控制器的功能可被分布在被经由通信系统连接的多个控制器之间。例如,多个控制器可以实现由负载平衡系统分配的相同功能。在另一示例中,控制器的功能可以被分摊在服务器(也被称为远程或云)控制器与客户端(或用户)控制器之间。
99.控制器的部分或全部硬件特征可被使用用于硬件描述的语言来加以限定,例如ieee标准1364-2005(通常被称为“verilog”)和ieee标准1076-2008(通常被称为“vhdl”)。该硬件描述语言可被用于制造和/或编程硬件电路。在一些实施方式中,控制器的一些或所有特征均可由语言加以限定,例如ieee 1666-2005(通常被称为“systemc”),其涵盖了如下所述的代码和硬件描述两者。
100.如上使用的术语代码可以包括软件、固件和/或微代码,并且可以指代程序、例程、函数、类、数据结构和/或对象。术语共享处理器电路涵盖了执行来自多个控制器的部分或
全部代码的单个处理器电路。术语群组处理器电路涵盖了处理器电路,该处理器电路与附加处理器电路相结合来执行来自一个或多个控制器的一些或全部代码。对多处理器电路的引用涵盖了分立管芯上的多个处理器电路、单个管芯上的多个处理器电路、单个处理器电路的多个内核、单个处理器电路的多个线程或上述的组合。术语共享存储器电路涵盖了存储来自多个控制器的部分或全部代码的单个存储器电路。术语群组存储器电路涵盖了存储器电路,该存储器电路与附加存储器相结合存储来自一个或多个控制器的一些或全部代码。
101.术语存储器电路是术语计算机可读介质的子集。如本文所用,术语计算机可读介质并未涵盖通过(例如载波上的)介质传播的瞬态电或电磁信号;因此,术语计算机可读介质可被视为是有形的和非暂时的。非暂时性计算机可读介质的非限制性示例是非易失性存储器电路(例如闪存电路、可擦除可编程只读存储器电路或掩模只读存储器电路)、易失性存储器电路(例如静态随机存取存储器电路或动态随机存取存储器电路)、磁存储介质(例如模拟或数字磁带或硬盘驱动器)和光学存储介质(例如cd、dvd或蓝光光碟)。
102.本技术中描述的设备和方法可以部分地或完全地由通过配置通用计算机来执行被在计算机程序中具体体现的一个或多个具体功能而创建的专用计算机来实现。上述功能块和流程图元件用作软件规范,其可以通过熟练的技术人员或程序员的日常工作而被翻译成计算机程序。
103.计算机程序包括被存储在至少一种非暂时性计算机可读介质上的处理器可执行指令。计算机程序还可以包括或依赖于所存储的数据。计算机程序可以涵盖与专用计算机的硬件交互的基本输入/输出系统(bios)、与专用计算机的具体装置交互的装置驱动程序、一个或多个操作系统、用户应用程序、后台服务、后台应用程序等。
104.计算机程序可以包括:(i)待解析的描述性文本,例如html(超文本标记语言)、xml(可扩展标记语言)或json(javascript对象表示法),(ii)汇编代码,(iii)由编译器从源代码产生的目标代码,(iv)由解释器执行的源代码,(v)由即时编译器编译和执行的源代码等。仅作为示例,源代码可被使用来自下列语言的句法予以编写,这些语言包括c、c 、c#、objective c、swift、haskell、go、sql、r、lisp、fortran、perl、pascal、curl、ocaml、html5(超文本标记语言第5版)、ada、asp(活动服务器页面)、php(php:超文本预处理器)、scala、eiffel、smalltalk、erlang、ruby、visuallua、matlab、simulink和
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。