1.本发明属于宠物训练设备领域,尤其涉及一种基于人工智能的智能宠物训练助手系统。
背景技术:
2.宠物指人们为了精神目的,而不是为了经济目的而豢养的生物。直到最近,宠物护理还只是宠物主人的责任,市场上有几种宠物玩具,但没有真正的自主解决方案来帮助他们护理宠物。近年来,出现了一些智能设备来帮助宠物护理,尤其是对猫和狗的护理,包括自动食品和饮水机、用于宠物监控的固定或遥控摄像头。但迄今为止,还没有智能设备可以帮助主人进行宠物训练,尤其是在学习特定命令并随着时间的推移加强训练以确保宠物长期仍能识别这些命令时。
3.目前,宠物都是由专门的宠物训练师负责训练,或者是由主人自己负责教给宠物基本的指令,但这两种情况都不能保证长期的效果,因为宠物训练师只会执行他们在一段时间内接受训练,然后由宠物主人继续加强训练并随着时间的推移重复命令。但通常的情况是,宠物主人无法跟上严格的宠物训练要求成为宠物长期技能的频率或一致性。此外,宠物主人没有标准化和系统的方法来监控宠物训练的进度,以及如何将某些命令视为已学会而其他一些命令需要加强。
4.因此,针对以上现状,迫切需要开发一种基于人工智能的智能宠物训练助手系统,以克服当前实际应用中的不足。
技术实现要素:
5.针对现有技术存在的不足,本发明实施例的目的在于提供一种基于人工智能的智能宠物训练助手系统,以解决上述背景技术中的问题。
6.为实现上述目的,本发明提供如下技术方案:一种基于人工智能的智能宠物训练助手系统,包括机器人子系统,还包括:人工智能模块,所述人工智能模块与机器人子系统电性连接,且所述人工智能模块用于配合机器人子系统直接与宠物进行互动并执行训练课程;移动app子系统,所述移动app子系统与云上子系统电性连接,所述移动app子系统用于供主人安排宠物的训练课程和监控训练进度;云上子系统,所述云上子系统与机器人子系统电性连接,所述云上子系统用于资源、安全和训练数据的管理。
7.作为本发明进一步的技术方案,所述机器人子系统包括机器人硬件、处理单元模块、摄像头和麦克风,所述机器人硬件包括硬件外壳和内部组件,所述处理单元模块、摄像头和麦克风均安装在机器人硬件内,所述处理单元模块分别与机器人硬件、摄像头和麦克风电性连接。
8.作为本发明进一步的技术方案,所述处理单元模块包括pcb板,所述pcb板与电机
电性连接,所述pcb板用于接收和处理来自内部组件的信号,所述电机用于驱动硬件外壳和内部组件进行运动。
9.作为本发明进一步的技术方案,所述人工智能模块包括:宠物检测模块,所述宠物检测模块用于对各种环境中的宠物进行检测;宠物识别模块,所述宠物识别模块用于对单个宠物进行识别;宠物姿态识别模块,所述宠物姿态识别模块用于对宠物的姿态进行识别。
10.作为本发明进一步的技术方案,所述基于人工智能的智能宠物训练助手系统的使用步骤具体如下:步骤(1):用户在移动app上为每只宠物创建单独的宠物资料,并输入宠物信息;步骤(2):用户记录自己对每只宠物说出的命令,并录制成视频上传至移动app上;步骤(3):用户使用移动app为宠物设置特定时间段的训练课程;步骤(4):云上子系统跟踪每只宠物训练课程的日程安排,并将训练课程的日程安排发送给机器人进行执行;步骤(5):训练课程启动时,机器人会中断其他功能,并进入到“训练模式”;步骤(6):机器人发出训练指令,命令宠物进行训练的同时,也对宠物的训练姿态进行识别;步骤(7):宠物每次正确执行命令后,系统控制机器人对宠物给予零食奖励;步骤(8):训练结束后,机器人将宠物训练记录和每次指令后的结果发送到云上子系统(4)进行存储和分析;步骤(9):云上子系统根据分析创建一份报告,显示宠物的进度和改进建议,并将其发送到移动app上,供用户对宠物的训练信息进行了解;步骤(10):用户根据移动app提供的宠物训练报告,对宠物的训练课程进行调整。
11.作为本发明进一步的技术方案,在步骤(4)中,用户在移动app上修改或删除预定的训练课程,系统会根据从移动app上收集的数据对训练课程进行更新,并将更新后的训练课程发送到机器人上。
12.作为本发明进一步的技术方案,在步骤(6)中,宠物在被机器人呼唤且识别后,机器人继续对宠物进行发送训练命令以及对命令的结构进行识别,直至预定训练课程命令结束。
13.作为本发明进一步的技术方案,在步骤(8)中,根据宠物的表现,移动app会对宠物的个人资料进行特定技能的改进,向用户提供宠物在特定训练中的表现以及长期期限的进展状况,并将数据存储到云上子系统内。
14.与现有技术相比,本发明的有益效果是:本发明系统通过设定的机器人子系统、人工智能模块、移动app子系统和云上子系统,可以帮助用户对宠物进行训练,保证宠物在学习特定命令并随着时间的推移加强训练,以确保宠物长期仍能识别这些命令,且本发明还可以为每只宠物提供有关训练成功和缺点的验证结果,方便用户对每只宠物的训练课程进行调整,提高对宠物训练的质量,值得进行推广。
15.为更清楚地阐述本发明的结构特征和功效,下面结合附图与具体实施例来对本发明进行详细说明。
附图说明
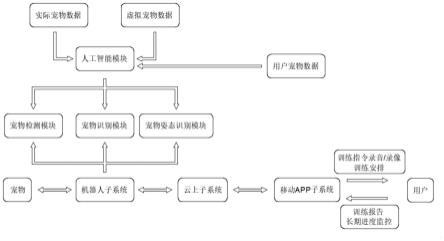
16.图1为本发明中基于人工智能的智能宠物训练助手系统的流程图。
17.图2为本发明中基于人工智能的智能宠物训练助手系统使用步骤的流程图。
18.图3为本发明对于宠物数据库和宠物姿势数据库创建合成数据方法的流程图。
19.图4为本发明中基于实际数据和虚拟数据对宠物训练的流程图。
具体实施方式
20.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
21.以下结合具体实施例对本发明的具体实现进行详细描述。
22.如图1和2所示,作为本发明一个实施例提供的一种基于人工智能的智能宠物训练助手系统,包括机器人子系统,还包括:人工智能模块,所述人工智能模块与机器人子系统电性连接,且所述人工智能模块用于配合机器人子系统直接与宠物进行互动并执行训练课程;移动app子系统,所述移动app子系统与云上子系统电性连接,所述移动app子系统用于供主人安排宠物的训练课程和监控训练进度;云上子系统,所述云上子系统与机器人子系统电性连接,所述云上子系统用于资源、安全和训练数据的管理。
23.在本实施例中,本发明系统通过设定的机器人子系统、人工智能模块、移动app子系统和云上子系统,可以帮助用户对宠物进行训练,保证宠物在学习特定命令并随着时间的推移加强训练,以确保宠物长期仍能识别这些命令,且本发明还可以为每只宠物提供有关训练成功和缺点的验证结果,方便用户对每只宠物的训练课程进行调整,提高对宠物训练的质量,值得进行推广。
24.对于云上子系统,使用 python 编程语言和 javascript 开发了程序、身份验证方法和智能资源管理例程,使用云服务器上的虚拟主机服务,允许接收来自移动app子系统的传入请求和来自机器人子系统的传出命令。
25.如图1所示,作为本发明的一种优选实施例,所述机器人子系统包括机器人硬件、处理单元模块、摄像头、麦克风、电池、充电系统、其他传感器、led灯、激光、食物分配系统、显示器、音箱、电机和舵机等,所述机器人硬件包括硬件外壳和内部组件,所述处理单元模块、摄像头、麦克风、电池、充电系统、其他传感器、led灯、激光、食物分配系统、显示器、音箱、电机和舵机等均安装在机器人硬件内,所述处理单元模块分别与机器人硬件、摄像头和麦克风电性连接。
26.在本实施例中,所述机器人子系统的操作系统是linux ubuntu,其软件是用python和c 编程语言以及任何linux bash命令编写的。机器人通过wifi连接互联网,通过认证后可以直接连接到云上子系统和移动app子系统;所述移动app子系统是为android和ios操作系统创建的,是结合flutter和 android/ios原生编程创建。
27.如图1所示,作为本发明的一种优选实施例,所述处理单元模块包括pcb板,所述
pcb板与电机电性连接,所述pcb板用于接收和处理来自内部组件的信号,所述电机用于驱动硬件外壳和内部组件进行运动。
28.如图1所示,作为本发明的一种优选实施例,所述人工智能模块包括:宠物检测模块,所述宠物检测模块用于对各种环境中的宠物进行检测;宠物识别模块,所述宠物识别模块用于对单个宠物进行识别;宠物姿态识别模块,所述宠物姿态识别模块用于对宠物的姿态进行识别。
29.在本实施例中,所述人工智能模块的所有功能都是使用深度学习方法创建的,并基于tensorflow 2.0并使用python 编程语言。所述人工智能模块的训练是使用真实动物收集的数据执行的采取任何理想的姿势;如图3和4所示,宠物检测模块和宠物姿态识别模块是使用神经网络的机器学习算法,其训练不仅基于观察真实宠物执行所需的记录所记录的数据姿势,但也基于合成数据,这些数据是专门为描绘虚拟环境中的动画宠物所需姿势而创建的。这极大地提高了人工智能模块的性能,因为宠物训练模型所需的训练数据非常稀缺,而且很难找到长时间保持这些姿势的宠物的质量数据。通过使用合成数据,可以克服这些困难,让虚拟宠物在需要的任何时间里摆出任何逼真的姿势。
30.如图3和4所示,为宠物数据库和宠物姿势数据库创建合成数据的方法包括以下步骤:1.使用软件blender创建宠物的3d模型,包括不同大小和品种的猫和狗;2.为3d模型创建骨架,以便可以操纵它们的姿势;3.为不同的宠物外观创建不同的外部网格——“皮肤”,包括不同的肤色、毛色、图案和毛长;4.在blender软件的3d环境中,使用不同的3d模型-骨架-“皮肤”组合来表示不同的合成宠物,并将合成宠物以不同的骨骼姿势放置;5.使用软件的虚拟相机,从不同的相机角度拍摄不同姿势的宠物的照片和视频;6.使用不同的图片和视频来训练机器学习模型。
31.总的来说, ai 模型是结合从现有的不同姿势的真实宠物数据库收集的数据进行训练的,这些数据随后进行了自我标记,不同姿势的真实宠物的自我收集和自我标记数据以及合成数据进行了训练。使用上述过程获得。测试仅对真实世界的数据进行。在整合合成数据后,模型的性能变得更加稳健,可以识别最初拥有非常有限的真实数据的许多品种或姿势 。
32.如图1和2所示,作为本发明的一种优选实施例,所述基于人工智能的智能宠物训练助手系统的使用步骤具体如下:步骤(1):用户购买机器人并在他们的手机上下载移动app,然后他们在移动app上创建一个账户,将他们的在线个人资料连接到他们购买的机器人;用户在移动app上为每只宠物创建单独的宠物资料,并输入宠物信息,在移动app上上传每只宠物的照片和视频,以便我们的人工智能模块可以使用它们来识别他们的每只宠物;步骤(2):用户记录自己对每只宠物说出的命令,包括叫出宠物的名字,例如“幸运”等,并录制成视频上传至移动app上,然后人工智能模块可以识别的其他命令,例如“坐下”、“躺下”、“滚
”ꢀ
和“站立”等;
步骤(3):用户使用移动app为宠物设置特定时间段的训练课程;步骤(4):云上子系统跟踪每只宠物训练课程的日程安排,并将训练课程的日程安排发送给机器人进行执行,训练课程可以包括最少一个命令,通常呼出命令是第一个,但也可以包括宠物应该一个接一个执行的一系列命令;步骤(5):训练课程启动时,机器人会中断其他功能,并进入到“训练模式”,它首先从叫出训练所针对的宠物的名字开始,然后人工智能模块会检测宠物是否已到达机器人周围,并识别被呼叫的特定宠物是否已到达。如果没有,则机器人重复宠物的名字一定次数,直到识别出宠物或直到命令被认为失败,在这种情况下停止训练;步骤(6):机器人发出训练指令,命令宠物进行训练的同时,也对宠物的训练姿态进行识别;步骤(7):宠物每次正确执行命令后,系统控制机器人对宠物给予零食奖励;步骤(8):训练结束后,机器人将宠物训练记录和每次指令后的结果发送到云上子系统进行存储和分析;步骤(9):云上子系统根据分析创建一份报告,显示宠物的进度和改进建议,并将其发送到移动app上,供用户对宠物的训练信息进行了解;步骤(10):用户根据移动app提供的宠物训练报告,对宠物的训练课程进行调整。
33.在本实施例中,用户上传视频的主要有两个原因:第一,保证宠物可以执行命令,因为教一个之前没有执行过的命令不能保证成功,但也可以尝试;其次,为了给我们的人工智能系统提供更多的数据,确保它能够更有效地识别正确的执行;系统控制机器人对宠物给予零食奖励,可以积极强化宠物行为,这种训练方法得到了设计此训练系统的宠物行为专家团队的认可,在训练课程开始包含更多命令后,仅在整个命令链的末尾给予正强化治疗。
34.如图2所示,作为本发明的一种优选实施例,在步骤(4)中,用户在移动app上修改或删除预定的训练课程,系统会根据从移动app上收集的数据对训练课程进行更新,并将更新后的训练课程发送到机器人上。
35.如图2所示,作为本发明的一种优选实施例,在步骤(6)中,宠物在被机器人呼唤且识别后,机器人继续对宠物进行发送训练命令以及对命令的结构进行识别,直至预定训练课程命令结束。
36.在本实施例中,对于每个命令,如果没有识别出正确的执行,则该命令会重复设定的次数,直到被识别或直到它被认为失败。
37.如图2所示,作为本发明的一种优选实施例,在步骤(8)中,根据宠物的表现,移动app会对宠物的个人资料进行特定技能的改进,向用户提供宠物在特定训练中的表现以及长期期限的进展状况,并将数据存储到云上子系统内。
38.在本实施例中,通过对宠物长期反复系统的训练,主人需要的时候,指令有更高的记忆率和正确执行率,使系统成为长期的训练辅助解决方案。
39.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。