一种基于mis太阳能电池结构的微纳机器人及其制备方法和应用
技术领域
1.本发明属于微纳机器人技术领域,具体涉及一种基于mis太阳能电池结构的微纳机器人及其制备方法和应用。
背景技术:
2.微纳机器人可以在纳米或微米尺度上将外部能量,如化学能、磁场、声场、电场、光能等转化为机械能,实现精确的运动操控。由于其独特的优势,包括如可操控性、自主运动能力以及易于表面功能化等,已显示出了各种生物医学应用的良好潜力。在按需给药、动态生物传感和精确成像等方面受到了极大的关注。
3.光作为一种具有能量的电磁波,可通过调节光强度、光传播方向、波长、偏振态和可逆的开启/关闭状态等对微纳机器人实现有效控制,具有高度的可控性、灵活性和时空分辨率。并且利用光对微纳米机器人进行驱动,不仅可以通过光电效应引起的电化学反应产生的局部电场,使得表面自带电荷的微纳机器人实现自电泳驱动,还可以通过光电效应产生的光电流实现不同功能,如对神经细胞进行调控、货物运输以及通过其微观可操控性与运动能力实现对生物标志物进行检测等。
4.硅作为一种窄带隙半导体材料和成熟的太阳能电池材料,具有优良的光电转换效率,同时硅基材料的制备工艺发展成熟,加工灵活性高,并且具有很好的生物相容性,已被用于光驱动微纳机器人的开发。以上优势使得基于硅纳米线的光驱动微纳机器人在诸多应用领域具有明显的优势。但是,当前硅纳米线光驱动微纳机器人也面临一些问题,基于硅纳米线的光驱动微纳机器人,如tio
2-si纳米树结构的光驱动微纳机器人等,合成过程较为复杂,并且需要高能量的紫外光激发,限制了在生物医学方面的应用;而基于pn结太阳能电池结构的硅纳米线光驱动微纳机器人,需要高温以及氢气环境的生长以及热掺杂,对设备和条件要求苛刻,且合成过程较为复杂,成本高,不利于大量制备;其次,光驱动微纳机器人的运动方向控制困难,且依赖复杂的外部装置,不利于医学应用的发展。为了推动提高硅基微纳机器人的医学应用,需要开发更为灵活精确的操控方式以及简易的制备工艺。
技术实现要素:
5.为解决现有技术中的上述问题,本发明提供了一种基于mis(金属-绝缘体-半导体)太阳能电池结构的微纳机器人及其制备方法和应用。该微纳机器人可在可见光激发下实现高效的驱动,并可利用磁场实现精确方向控制;同时本发明的制备方法简单,是一种可大量制备的全新硅纳米线微纳机器人的制备工艺。
6.为实现上述目的,本发明提供了如下技术方案:
7.本发明提供了一种基于mis太阳能电池结构的微纳机器人,所述微纳机器人为核壳硅纳米线结构,由内到外依次包括硅纳米线层、绝缘层、磁性金属层及催化剂层。
8.进一步地,所述硅纳米线为n型硅纳米线,长度为3~20μm,直径为0.5~2μm;所述
绝缘层的厚度为5~10nm;所述磁性金属层的厚度为10~30nm。
9.进一步地,所述绝缘层为sio2层,所述磁性金属层为金属ni层。
10.进一步地,所述催化剂层为金属氧化物层。
11.进一步地,所述金属氧化层的厚度为5~10nm。
12.金属氧化物催化剂的作用为催化光电化学反应,提高光电流,进而实现驱动效率的提升,如果不对磁性金属进行氧化会导致光电化学反应效率减低,使得运动速度降低。
13.进一步地,所述金属氧化物层表面还包括共催化剂金属纳米颗粒。
14.进一步地,所述金属纳米颗粒包括金纳米颗粒或铂纳米颗粒
15.金属纳米颗粒作为共催化剂,能够起到进一步提高催化光电化学反应的作用。
16.本发明还提供了上述所述的微纳机器人的制备方法,包括以下步骤:利用光刻工艺在硅片上制备光刻胶的点阵,通过控制点阵的直径可以控制后续硅纳米线的直径;之后利用湿法刻蚀工艺制备硅纳米线阵列,通过控制湿法刻蚀时间可实现硅纳米线长度的控制,后续的热氧化刻蚀能够调控硅纳米线的直径;采用热氧化法在所得硅纳米线阵列表面得到绝缘层,然后在所述绝缘层上蒸镀磁性金属层,并利用热氧化法部分氧化所述磁性金属层得到金属氧化物层作为催化剂层,通过控制热氧化的时间控制金属层的氧化程度,从而控制金属氧化物层的厚度。
17.进一步地,还包括在所述催化剂层表面磁控溅射金属纳米颗粒作为共催化剂的步骤。
18.本发明同时提供了上述所述的微纳机器人在制备微区物体运输材料、靶向载药材料或光神经调节材料中的应用。
19.进一步地,所述微纳机器人为可见光驱动微纳机器人。
20.进一步地,所述微纳机器人在可见光驱动、外部磁场控制下进行运动,可见光的强度为10~1000mw/cm2;所述外部磁场为梯度磁场,方向可调。
21.与现有技术相比,本发明具有以下有益效果:
22.1.本发明提出一种基于mis太阳能电池结构的新型硅纳米线微纳机器人,大大简化了目前基于pn结硅基微纳机器人的工艺;
23.2.相比现有技术,本发明设计的mis结构的微纳机器人在保证可见光驱动效率的前提下,磁性金属的引入也能有效利用外部磁场实现对微纳机器人方向的有效控制;
24.3.通过引入价格低廉且性质稳定的磁性金属ni和优化光电催化体系,极大提高了光电化学反应效率,实现了高效的自电泳驱动,磁性金属ni也可作为磁性元素,为精确的磁操控提供了可能,为靶向药物输送、微区物体运输以及光神经调节等提供了很好的应用前景。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
26.图1为本发明的基于mis太阳能电池结构的微纳机器人的合成路径图;
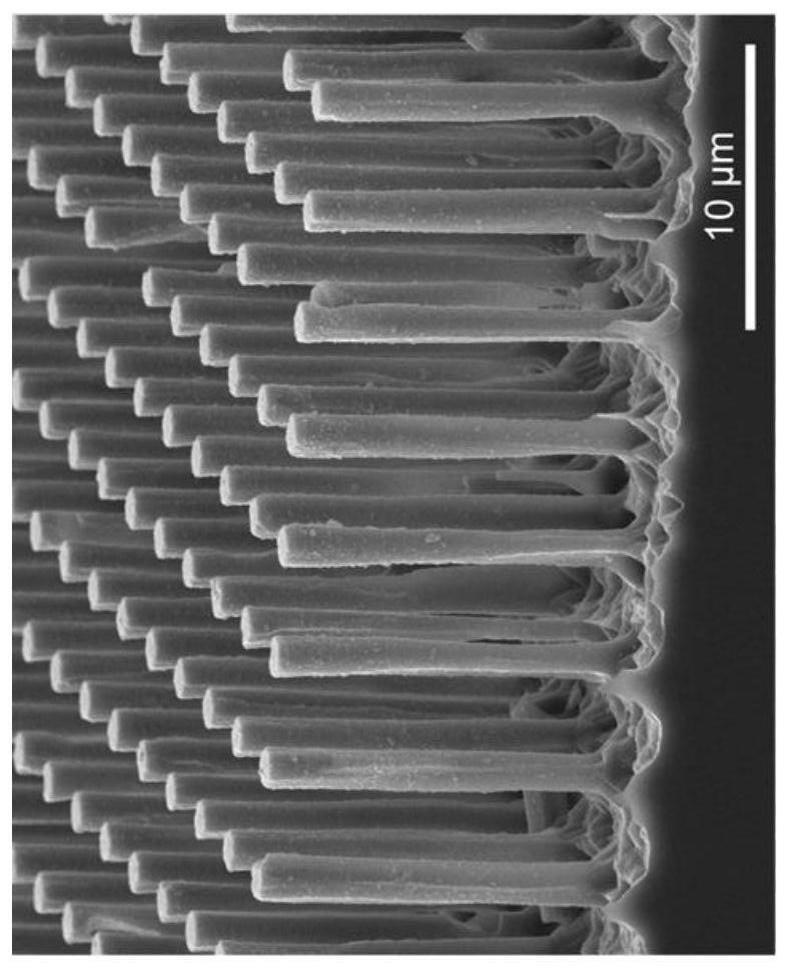
27.图2为实施例1制备得到的基于mis太阳能电池结构的微纳机器人的sem图;
28.图3为实施例1制备得到的基于mis太阳能电池结构的微纳机器人的edx元素分布图;
29.图4为本发明提供的基于mis太阳能电池结构的微纳机器人的运动机理示意图;
30.图5为n型硅纳米线光电阴极电极与mis纳米线光电阳极电极在光开关状态下的电流-时间折线图;
31.图6为实施例1制备得到的基于mis太阳能电池结构的微纳机器人在光开关状态下的运动速度曲线;
32.图7为实施例1制备得到的基于mis太阳能电池结构的微纳机器人在开、关光状态下的运动轨迹图;
33.图8为实施例1制备得到的基于mis太阳能电池结构的微纳机器人在不同光照强度下的运动速度点线图;
34.图9为实施例1制备得到的基于mis太阳能电池结构的微纳机器人在可见光驱动,梯度磁场引导下的运动轨迹图;
35.图10为利用实施例1制备得到的基于mis太阳能电池结构的微纳机器人在可见光驱动,磁场引导下运输二氧化钛胶体颗粒的轨迹图。
具体实施方式
36.现详细说明本发明的多种示例性实施方式,该详细说明不应认为是对本发明的限制,而应理解为是对本发明的某些方面、特性和实施方案的更详细的描述。应理解本发明中所述的术语仅仅是为描述特别的实施方式,并非用于限制本发明。
37.另外,对于本发明中的数值范围,应理解为还具体公开了该范围的上限和下限之间的每个中间值。在任何陈述值或陈述范围内的中间值以及任何其他陈述值或在所述范围内的中间值之间的每个较小的范围也包括在本发明内。这些较小范围的上限和下限可独立地包括或排除在范围内。
38.除非另有说明,否则本文使用的所有技术和科学术语具有本发明所述领域的常规技术人员通常理解的相同含义。虽然本发明仅描述了优选的方法和材料,但是在本发明的实施或测试中也可以使用与本文所述相似或等同的任何方法和材料。本说明书中提到的所有文献通过引用并入,用以公开和描述与所述文献相关的方法和/或材料。在与任何并入的文献冲突时,以本说明书的内容为准。
39.在不背离本发明的范围或精神的情况下,可对本发明说明书的具体实施方式做多种改进和变化,这对本领域技术人员而言是显而易见的。由本发明的说明书得到的其他实施方式对技术人员而言是显而易见的。本发明说明书和实施例仅是示例性的。
40.关于本文中所使用的“包含”、“包括”、“具有”、“含有”等等,均为开放性的用语,即意指包含但不限于。
41.实施例1
42.基于mis太阳能电池结构的微纳机器人的制备:
43.(1)清洗硅片:按照体积比为1∶7,将质量分数为30%的双氧水与质量分数为98%的浓硫酸混合得到清洗液,将晶型为《100》的n型硅片置于清洗液中,加热至180℃对硅片进
行清洗,结束后用水、异丙醇、丙酮交替清洗;
44.(2)通过光刻制备点阵图案:所选光刻胶为az 5214光刻胶,旋涂条件为4000转30s,110℃烘2min,然后覆盖上图案尺寸为4.5
×
4.5cm、点直径为2μm、点间距为2μm的掩模版,曝光20s,利用显影液zx-238进行显影,得到点阵图案;通过控制点阵的直径可以控制后续硅纳米线的直径;
45.(3)硅纳米线的湿法刻蚀:将具有点阵图案硅片置于刻蚀液中,刻蚀液为hf与agno3的混合水溶液,刻蚀液中,hf的浓度为5mol/l,agno3的浓度为0.02mol/l,所用刻蚀液体积与硅片的面积有关,比例为3ml/cm2,刻蚀速率为142nm/min;取出后用丙酮去除剩余光刻胶,水洗后浸泡在浓硝酸中去除剩余的ag,取出后依次用水、异丙醇洗涤,并在80℃加热台上干燥;通过控制刻蚀时间可实现硅纳米线长度的控制,本实施例中,湿法刻蚀的时间为70分钟,所得硅纳米线的长度为10μm;后续的热氧化刻蚀能够调控硅纳米线的直径;
46.(4)硅纳米线直径的控制:之后通过热氧化和刻蚀去掉阵列以外的细硅纳米线,并对阵列的直径进行调整。具体步骤为:将步骤(3)得到的样品在1000℃,氧气气氛下热氧化,氧化速率为100nm/h,时间为90min,然后通过氢氟酸的缓冲溶液(bhf,49wt%的hf与40wt%的nh4f水溶液按照体积比1:5配置)刻蚀氧化硅,速率为:100nm/min,时间为5min,重复刻蚀两次,得到的硅纳米线的直径为1μm;
47.(5)热氧化法得到绝缘层:将步骤(4)所得样品在900℃,氧气气氛下热氧化,控制处理时间来调节绝缘层sio2的厚度;本实施例中的处理时间为2分钟,绝缘层sio2的厚度为5nm;
48.(6)热蒸发磁性金属ni:利用高真空电阻热蒸发镀膜设备将磁性金属ni蒸镀于硅纳米线表面形成mis太阳能电池结构,通过蒸镀速率和时间控制金属层的厚度;本实施例中蒸镀速率为蒸镀时间为400s,所得金属层厚度为20nm;
49.(7)催化剂层的控制:首先利用等离子清洗机,将步骤(6)所得样品在氧气气氛下处理300s,使金属ni被部分氧化,得到nio
x
催化剂层(金属ni层的厚度为10~30nm时,控制氧气氛围下的处理时间为200~400s,均可实现金属ni被部分氧化,最终得到的微纳机器人的性能相当);然后利用离子溅射仪沉积au纳米颗粒并控制其形成不连续的膜(折合厚度为2~5nm即可),作为共催化剂,得到基于mis太阳能电池结构的微纳机器人。
50.图1展示了本实施例基于mis太阳能电池结构的微纳机器人的合成路径,过程为:1)利用微纳加工的方法得到规则排列的n型硅纳米线阵列;2)利用热氧化法得到绝缘层sio2;3)将磁性金属蒸镀至si纳米线阵列表面形成mis结;4)利用热氧化法得到nio
x
层;5)利用磁控溅射将au纳米颗粒沉积于表面得到基于mis太阳能电池结构的微纳机器人;6)将基于mis太阳能电池结构的微纳机器人利用超声或者刀片刮下分散于氧化还原电对的水溶液中。
51.图2展示了本实施例制备得到的基于mis太阳能电池结构的微纳机器人的扫描电镜(scanning electron microscope,sem)图片,由图2可看出,微纳机器人规则排列,长度大约为10μm,直径为1.5μm,mis微纳机器人的长度可以通过湿法刻蚀时间控制,直径可通过热氧化刻蚀si纳米线控制。
52.图3展示了本实施例制备得到的基于mis太阳能电池结构的微纳机器人的edx元素分布图,可看出有au,ni,si,o等元素均匀分布在硅纳米线表面。
53.对比例1
54.同实施例1,区别在于,不含步骤(7),即制备得到不含nio
x
催化剂层和金纳米颗粒共催化剂的基于mis太阳能电池结构微纳机器人。
55.对比例2
56.同实施例1,区别在于,步骤(7)为:催化剂层的控制:利用等离子清洗机,将步骤(6)所得样品在氧气气氛下处理300s得到nio
x
催化剂层,得到仅含nio
x
催化剂层的基于mis太阳能电池结构的微纳机器人。
57.基于mis太阳能电池结构的微纳机器人的测试:
58.将实施例1制备得到的微纳机器人用刀片刮下转移至氧化还原电对的水溶液中(也可采用超声分散法对其进行转移,具体为:将含有微纳机器人的硅片置于二茂铁甲醇溶液中,并超声分散1min),比如二茂铁甲醇或者醌氢醌作为氧化还原电对,本发明测试过程采用的为饱和二茂铁甲醇水溶液,在可见光激发下即可观察并记录运动情况,进一步施加外部的梯度磁场可以进行方向操控的测试。
59.微纳机器人的运动机理示意图如图4所示,在光照条件下的mis结中,光子被半导体吸收产生电子-空穴对,产生的空穴将移向金属,而电子将移向半导体内,从而产生光电流,mis微纳机器人基于mis的太阳能电池结构产生光电压,驱动氧化还原反应,在si的核与外层ni的壳上分别发生还原反应与氧化反应,该反应可产生带电离子产物在微纳机器人周围产生不平衡的离子分布,从而建立起局部电场,通过自电泳的机理驱动本身带负电荷的微纳机器人产生自发运动,而磁性金属ni的引入,使mis微纳机器人可利用外界梯度磁场实现方向控制。
60.以实施例1步骤(4)得到的硅纳米线作为光阴极电极、实施例1制备得到的基于mis太阳能电池结构的微纳机器人作为光阳极电极,通过外部导线连接组成光电化学反应测试体系,图5展示了其在光开关状态下的电流-时间折线图,在饱和二茂铁甲醇水溶液中,在可见光光照条件下(强度为420mw/cm2),mis(金属-绝缘体-半导体)结中,当光子能量大于禁带能量时,在半导体的耗尽区与体内都要产生电子-空穴对,产生的空穴将移向金属,而电子将移向半导体内,从而产生光电流,大多数的光子在半导体体内吸收,光生电流主要由半导体流向金属的空穴流产生,在光照条件下,光电流可达25μa/cm2,与黑暗环境下,不能吸收光子能量,光电流差值较大,可证明该太阳能电池结构可以吸收光子能量,转换为光电压。
61.图6展示了微纳机器人在光开关状态下的运动速度曲线,在饱和二茂铁甲醇水溶液中,可见光照条件下(强度为420mw/cm2),mis微纳机器人产生的光电压,驱动光电化学反应发生,从而即时的驱动微纳机器人的启动,而关光之后光电化学反应停止,微纳机器人仅表现出布朗运动,因此可以通过开关光来控制微纳机器人的即时启停。
62.图6中显示了实施例1制备得到的基于mis太阳能电池结构的微纳机器人在可见光下,其运动速度可达到20μm/s;采用对比例1~2制备得到的微纳机器人进行上述相同试验,发现,对比例1中不含金属氧化物层,也不含金纳米颗粒层的微纳机器人,可见光催化效果很差,导致其在可见光下不能运动;对比例2中,微纳机器人只含有金属氧化物催化剂层,不含共催化剂金纳米颗粒,其在可见光催化下的运动速度为5μm/s,运动速度明显下降。
63.图7展示了mis微纳机器人在开、关光状态下的运动轨迹图(可见光照强度为
420mw/cm2)。
64.图8为mis微纳机器人在不同光照强度下的运动速度点线图,由图8可以看出,在一定光强度范围内速度与光强呈线性关系。
65.图9为mis微纳机器人在可见光(光照强度为420mw/cm2)驱动,梯度磁场(强度为5mt)引导下的运动轨迹图,由图9可以看出,在外部磁场的控制下能够实现微纳机器人运动的精确控制。
66.图10为微纳机器人在可见光驱动(光强度为420mw/cm2),磁场引导(强度为5mt)下运输二氧化钛胶体颗粒的轨迹图,由于实施例1制备得到的基于mis太阳能电池结构的微纳机器人是表面带电的,所以当靠近二氧化钛胶体颗粒时,会通过电泳力和静电力将颗粒吸附到微纳机器人表面,通过光驱动进行运送,外部磁场的精确方向控制能够使其运送到特定位置,然后通过磁场控制的旋转能够实现颗粒的释放;然后重复以上过程去运送其他的颗粒,最终摆成特定的形状。由图10可以看出,微纳机器人可以实现微区范围内对二氧化钛胶体颗粒的精确的运输和摆放,图中摆出的是“五筒”的图形。
67.以上所述,仅为本发明较佳的具体实施方式,本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。