技术特征:
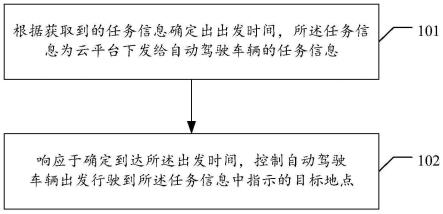
1.一种自动驾驶车辆控制方法,包括:根据获取到的任务信息确定出出发时间,所述任务信息为云平台下发给自动驾驶车辆的任务信息;响应于确定到达所述出发时间,控制所述自动驾驶车辆出发行驶到所述任务信息中指示的目标地点。2.根据权利要求1所述的方法,其中,所述响应于确定到达所述出发时间,控制所述自动驾驶车辆出发行驶到所述任务信息中指示的目标地点包括:响应于确定到达所述出发时间,发出车辆启动指示;响应于获取到针对所述车辆启动指示返回的确认指令,控制所述自动驾驶车辆出发行驶到所述任务信息中指示的目标地点。3.根据权利要求1或2所述的方法,其中,所述任务信息中包括:发车时间、起始地点以及目标地点,所述目标地点的数量为m,m为正整数;所述根据获取到的任务信息确定出出发时间包括:若所述自动驾驶车辆当前所在位置为所述起始地点,则将所述发车时间作为所述出发时间;若所述自动驾驶车辆当前所在位置为最后一个目标地点之外的任一目标地点,则根据所述自动驾驶车辆到达所述当前所在位置的时间以及需要在所述当前所在位置停留的时长确定出所述出发时间。4.根据权利要求3所述的方法,其中,所述控制所述自动驾驶车辆出发行驶到所述任务信息中指示的目标地点包括:根据所述当前所在位置以及下一个目标地点进行路径规划,得到规划出的行驶路径;控制所述自动驾驶车辆按照所述行驶路径行驶到所述下一个目标地点。5.根据权利要求1或2所述的方法,还包括:根据所述任务信息生成乘车提示信息;将所述乘车提示信息通过屏幕进行展示,和/或,将所述乘车提示信息进行广播。6.一种自动驾驶车辆控制方法,包括:生成针对任一自动驾驶车辆的任务信息;将所述任务信息下发给所述自动驾驶车辆,用于所述自动驾驶车辆在到达根据所述任务信息确定出的出发时间时、出发行驶到所述任务信息中指示的目标地点。7.根据权利要求6所述的方法,其中,所述任务信息中包括:发车时间、起始地点以及目标地点,所述目标地点的数量为m,m为正整数;当所述自动驾驶车辆当前所在位置为所述起始地点时,所述出发时间为所述发车时间;当所述自动驾驶车辆当前所在位置为最后一个目标地点之外的任一目标地点时,所述出发时间为根据所述自动驾驶车辆到达所述当前所在位置的时间以及需要在所述当前所在位置停留的时长确定出的出发时间。8.根据权利要求7所述的方法,其中,
所述行驶路径为针对所述当前所在位置以及下一个目标地点进行路径规划后得到的行驶路径。9.一种自动驾驶车辆控制装置,包括:第一控制模块以及第二控制模块;所述第一控制模块,用于根据获取到的任务信息确定出出发时间,所述任务信息为云平台下发给自动驾驶车辆的任务信息;所述第二控制模块,用于响应于确定到达所述出发时间,控制所述自动驾驶车辆出发行驶到所述任务信息中指示的目标地点。10.根据权利要求9所述的装置,其中,所述第二控制模块响应于确定到达所述出发时间,发出车辆启动指示,响应于获取到针对所述车辆启动指示返回的确认指令,控制所述自动驾驶车辆出发行驶到所述任务信息中指示的目标地点。11.根据权利要求9或10所述的装置,其中,所述任务信息中包括:发车时间、起始地点以及目标地点,所述目标地点的数量为m,m为正整数;所述第一控制模块在所述自动驾驶车辆当前所在位置为所述起始地点时,将所述发车时间作为所述出发时间,在所述自动驾驶车辆当前所在位置为最后一个目标地点之外的任一目标地点时,根据所述自动驾驶车辆到达所述当前所在位置的时间以及需要在所述当前所在位置停留的时长确定出所述出发时间。12.根据权利要求11所述的装置,其中,所述第二控制模块根据所述当前所在位置以及下一个目标地点进行路径规划,得到规划出的行驶路径,控制所述自动驾驶车辆按照所述行驶路径行驶到所述下一个目标地点。13.根据权利要求9或10所述的装置,其中,所述第二控制模块进一步用于,根据所述任务信息生成乘车提示信息,将所述乘车提示信息通过屏幕进行展示,和/或,将所述乘车提示信息进行广播。14.一种自动驾驶车辆控制装置,包括:任务生成模块以及任务下发模块;所述任务生成模块,用于生成针对任一自动驾驶车辆的任务信息;所述任务下发模块,用于将所述任务信息下发给所述自动驾驶车辆,用于所述自动驾驶车辆在到达根据所述任务信息确定出的出发时间时、出发行驶到所述任务信息中指示的目标地点。15.根据权利要求14所述的装置,其中,所述任务信息中包括:发车时间、起始地点以及目标地点,所述目标地点的数量为m,m为正整数;当所述自动驾驶车辆当前所在位置为所述起始地点时,所述出发时间为所述发车时间;当所述自动驾驶车辆当前所在位置为最后一个目标地点之外的任一目标地点时,所述出发时间为根据所述自动驾驶车辆到达所述当前所在位置的时间以及需要在所述当前所在位置停留的时长确定出的出发时间。16.根据权利要求15所述的装置,其中,所述行驶路径为针对所述当前所在位置以及下一个目标地点进行路径规划后得到的
行驶路径。17.一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-8中任一项所述的方法。18.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使计算机执行权利要求1-8中任一项所述的方法。19.一种计算机程序产品,包括计算机程序/指令,所述计算机程序/指令被处理器执行时实现权利要求1-8中任一项所述的方法。
技术总结
本公开提供了自动驾驶车辆控制方法、装置、电子设备及存储介质,涉及自动驾驶以及智能交通等人工智能领域,其中的方法可包括:根据获取到的任务信息确定出出发时间,所述任务信息为云平台下发给自动驾驶车辆的任务信息;响应于确定到达出发时间,控制自动驾驶车辆出发行驶到所述任务信息中指示的目标地点。应用本公开所述方案,可实现对于自动驾驶车辆的有效控制,拓展自动驾驶车辆的应用场景等。拓展自动驾驶车辆的应用场景等。拓展自动驾驶车辆的应用场景等。
技术研发人员:饶文龙 刘颖楠 薛晶晶 王姝然 王勇博 王子杰 熊皓 乔檩 龚伟
受保护的技术使用者:阿波罗智行科技(广州)有限公司
技术研发日:2022.03.17
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。