1.本发明涉及无人机电力巡检领域的一种电力巡检控制方法,特别涉及一种基于无人机的电力线巡检控制方法。
背景技术:
2.现代经济社会的发展离不开电力的发展,它与人们的生活息息相关。目前我国国内电网迅速发展,其规模建设不断扩大,配网线路急剧增加,直接对传统人工巡检带来了极大的不便。而目前国内对于电力线巡检大多采用“人工机巡”的方式,由于作业人员技能水平和评判标准的不同,巡视质量和结果都会有误差,还存在一定的操作风险。
3.为了推进智慧巡线,摆脱传统费时费力的人工巡检方式,依靠无人机对电力线路实施无人机精细化巡视已经成为现代供电系统的必然需求。为了从“人工操控”成功过渡到“自主巡航”,近年来人们对无人机的应用智能化做出了许多研究。无人机的应用
4.实现了配网线路的高效率、智能化。采用无人机自主巡检系统,仅需一名监护工作人员即可完成全部巡视作业,大大降低了人工成本和作业强度,使得电力巡检工作更规范安全,巡视效率大大提升。
技术实现要素:
4.为了解决背景技术中的问题,本发明的目的是提供了一种基于无人机的电力线巡检控制方法,能够将无人机进行异地起降,进行远程控制电力线巡检,减少了作业的半径,提高了作业效率和安全,降低了成本,而且减少了人力物力。
5.本发明采用的技术方案如下:
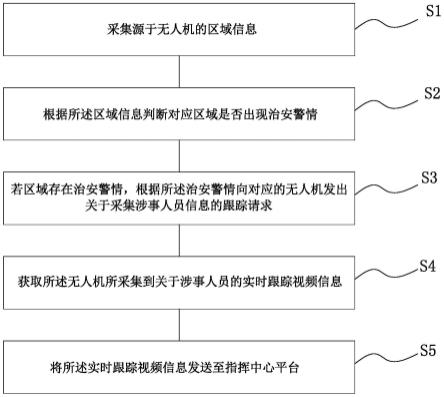
6.无人机接收云服务器发送来的从a地到b地的电力线巡检任务,执行电力线巡检任务沿巡检路径飞行;在实时飞行过程中,通过单目摄像头获取巡检路径上的电力线图像,并实时进行图像处理获得无人机对电力线循迹的巡线方向和航向偏差,根据图像获取的巡线方向和航向偏差对无人机进行飞行控制修正,实现电力线巡检飞行。
7.所述的云服务器上有设置a地与b地之间设定多条既定得电力线任务,选择需要执行的任务和控制指令,其中控制指令有a地控制、b地控制、起飞、降落、巡线控制、开始传输数据以及停止传输数据。
8.所述图像处理对单目摄像头实时获取的电力线图像视频数据进行图像预处理获得二值化图像,对预处理后的二值化图像再进行电力线检测的处理,获取巡线方向和航向偏差进而控制飞行。
9.所述的预处理按照以下过程进行:
10.s1、将电力线图像按水平方向等分成四个竖直条形的矩形区域,取中间的两个矩形区域为roi区域;
11.s2、对获取的roi区域进行加权平均的灰度化算法,在每个像素点(m,n)上加权计算获得加权像素值f(m,n),其中:
12.f(m,n)=0.28*r(m,n) 0.6*g(m,n) 0.12b(m,n)
13.式中,r(m,n)、g(m,n)、b(m,n)分别为计算前图像在像素点(m,n)上红色、绿色、蓝色通道对应的像素值,m,n分别表示个像素点的横纵坐标;
14.s3、对每个像素点(m,n)的加权像素值f(m,n)再按照以下公式进行高斯滤波之后获得灰度值g(m,n),其中:
[0015][0016]
式中,σ为图像标准差,e表示自然常数;
[0017]
s4、对每个像素点的灰度值g(m,n)用sobel算子处理得到像素点在图像横纵x与y方向上的梯度值g
x
(m,n)和gy(m,n);
[0018]
s5、根据像素点在图像横纵x与y方向上的梯度值g
x
(m,n)和gy(m,n)通过以下公式计算像素点的梯度强度值g(m,n)和梯度方向角θ:
[0019]
g(m,n)=|g
x
(m,n)f
x
|
[0020][0021]
然后使用像素点的梯度强度值g(m,n)和梯度方向角θ输入canny边缘检测算法中进行canny边缘检测完成图像预处理,获得图像中的具有边缘区域的二值化图像。
[0022]
所述的电力线检测的处理按照以下过程进行:
[0023]
1)对预处理获得的二值化图像通过高斯采样缩小至原来图像尺寸的80%,然后计算图像上每个像素点的x方向梯度值g
x
(x,y)和y方向梯度值gy(x,y),其中:
[0024][0025][0026]
式中,i(x,y)为像素点(x,y)的灰度值;
[0027]
2)再根据像素点的x方向梯度值g
x
(x,y)和y方向梯度值gy(x,y)按照以下的公式计算每个像素点的梯度强度值g(x,y)和梯度角θ(x,y):
[0028]
g(x,y)=0.75(|g
x
(x,y)| |gy(x,y)|)
[0029][0030]
2)利用梯度强度值g(x,y)和梯度角θ(x,y)依次进行区域增长和矩形拟合获得电力线区域,对电力线区域经kalman滤波后输出获得实时的多条电力线及每条电力线的像素点坐标信息;
[0031]
3)当前时刻实时计算求取每条电力线的斜率,求取各条电力线的斜率的平均斜率值l(t),以平均斜率值l(t)作为当前时刻拟合的巡线方向,以l(t-1)为前一时刻拟合的巡线方向,在角度差值阈值ε0限制下,根据前后时刻的巡线方向按照以下公式计算获得修正的当前时刻平均斜率值l:
[0032][0033]
式中,ε为当前时刻拟合的巡线方向与前一时刻拟合的巡线方向的角度差值,a表示角度差值阈值ε0对应的权值,a取值范围为(0,1),t表示时刻;
[0034]
同时,通过修正的当前时刻平均斜率值l计算需要无人机调整的航向偏差角∠β为:
[0035]
/β=π-arctan-1
l。
[0036]
通过使用模糊控制算法,实时输入航向偏差角∠β来控制无人机巡线飞行调整航向角度,通过修正的当前时刻平均斜率值l实时输入无人机按照当前时刻的平均斜率值l(t)对应的巡线方向飞行。
[0037]
本发明的有益效果是:
[0038]
本发明可以进行无人机远程控制执行电力线巡检任务,而不需要人工作业的方式跟随无人机巡检。
[0039]
本发明可以通过远程服务器,对无人机进行异地起降执行电力线巡检任务,从而大大减少了作业半径,提高了巡检的效率。
[0040]
本发明巡检的控制方法经过改进,效率比较高,可以准确识别出电力线并进行巡检。
附图说明
[0041]
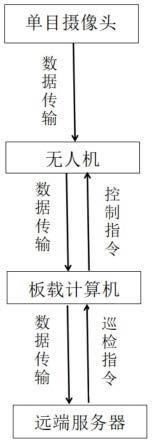
图1为本发明具体系统的结构框图;
[0042]
图2为本发明方法的结构示意框图;
[0043]
图3为本发明方法拟合巡线方向算法a权值的取值表图;
[0044]
图4为本发明方法无人机航向偏差原理图。
具体实施方式
[0045]
下面结合附图和实施例对本发明作进一步说明,以便对本发明的实施例中的技术方案进行清楚、完整地描述。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0046]
下面参考附图来描述本发明实施例及其实施过程:
[0047]
无人机接收云服务器发送来的从a地到b地的电力线巡检任务;执行电力线巡检任务沿巡检路径飞行;在实时飞行过程中,通过单目摄像头获取巡检路径上的电力线图像,并实时进行图像处理获得无人机对电力线循迹的巡线方向和航向偏差,根据图像获取的巡线方向和航向偏差对无人机进行飞行控制修正,实现电力线巡检飞行。
[0048]
如图2所示,本发明具体实施的系统整体结构包括:单目摄像头、无人机、板载计算机、远端服务器。
[0049]
云服务器上有设置a地与b地之间设定多条既定得电力线任务,a地与b地可互为起飞地降落地,选择需要执行的任务和控制指令,其中控制指令有a地控制、b地控制、起飞、降落、巡线控制、开始传输数据以及停止传输数据。
[0050]
首先,对无人机上的单目摄像头实时获取的电力线图像视频数据进行图像预处理
获得二值化图像,预处理按照以下过程进行:
[0051]
s1、在无人机飞行方向上,将电力线图像按水平方向等分成四个竖直条形的矩形区域,取中间的两个矩形区域为roi区域;
[0052]
s2、对获取的roi区域进行加权平均的灰度化算法,在每个像素点(m,n)上加权计算获得加权像素值f(m,n),其中:
[0053]
f(m,n)=0.28*r(m,n) 0.6*g(m,n) 0.12b(m,n)
[0054]
式中,r(m,n)、g(m,n)、b(m,n)分别为计算前图像在像素点(m,n)上红色、绿色、蓝色通道对应的像素值,m,n分别表示个像素点的横纵坐标;
[0055]
s3、对每个像素点(m,n)的加权像素值f(m,n)再按照以下公式进行高斯滤波之后获得灰度值g(m,n),其中:
[0056][0057]
式中,σ为图像标准差,e表示自然常数;
[0058]
s4、在canny边缘检测算法前,先对每个像素点的灰度值g(m,n)用sobel算子处理得到像素点在图像横纵x与y方向上的梯度值g
x
(m,n)和gy(m,n);
[0059]
式中,sobel算子包括f
x
为x方向sobel算子,fy为y方向sobel算子,分别表示为:
[0060][0061]
以每个像素点的灰度值g(m,n)和x方向sobel算子相乘处理得到像素点在图像横x方向上的梯度值g
x
(m,n);以每个像素点的灰度值g(m,n)和y方向sobel算子相乘处理得到像素点在图像横y方向上的梯度值gy(m,n)。
[0062]
其中,以无人机飞行方向为y轴方向,与无人机飞行方向垂直的水平方向为x轴方向。
[0063]
s5、将梯度算法改进为x方向像素的梯度强度值,根据像素点在图像横纵x与y方向上的梯度值g
x
(m,n)和gy(m,n)通过以下公式计算像素点的梯度强度值g(m,n)和梯度方向角θ:
[0064]
g(m,n)=|g
x
(m,n)f
x
|
[0065][0066]
然后使用新的像素点的梯度强度值g(m,n)和梯度方向角θ输入canny边缘检测算法中进行canny边缘检测完成图像预处理,获得图像中的具有边缘区域的二值化图像。
[0067]
二值化图像中以边缘区域作为目标,其余区域作为背景区域。
[0068]
公式中,仅用像素点在图像横纵x方向上的梯度值g
x
(m,n)计算像素点的梯度强度值g(m,n),这样能够减少y方向边缘带来的梯度干扰,可以更好的突出该点的梯度强度,提高后续canny边缘检测的准确度。
[0069]
预处理获得的二值化图像中的边缘区域可能不只是电力线,还有树叶等干扰物体,还要通过电力线检测的处理消除干扰物体的区域,进而保留电力线的区域。
[0070]
对预处理后的二值化图像再进行电力线检测的处理,获取巡线方向和航向偏差进而控制飞行,电力线检测的处理按照以下过程进行:
[0071]
1)对预处理获得的二值化图像通过高斯采样缩小至原来图像尺寸的80%,然后计算图像上每个像素点的x方向梯度值g
x
(x,y)和y方向梯度值gy(x,y),其中:
[0072][0073][0074]
式中,i(x,y)为像素点(x,y)的灰度值;
[0075]
2)再根据像素点的x方向梯度值g
x
(x,y)和y方向梯度值gy(x,y)按照以下的改进公式计算每个像素点的梯度强度值g(x,y)和梯度角θ(x,y):
[0076]
g(x,y)=0.75(|g
x
(x,y)| |gy(x,y)|)
[0077][0078]
3)利用梯度强度值g(x,y)和梯度角θ(x,y)依次进行区域增长和矩形拟合获得电力线区域,电力线区域包括了多条电力线的区域,对电力线区域经kalman滤波后输出获得实时的多条电力线及每条电力线的像素点坐标信息;
[0079]
4)当前时刻实时计算求取每条电力线的斜率,求取各条电力线的斜率的平均斜率值l(t),以平均斜率值l(t)作为当前时刻拟合的巡线方向,以l(t-1)为前
[0080][0081]
一时刻拟合的巡线方向,在角度差值阈值ε0限制下,根据前后时刻的巡线方向按照以下公式计算获得修正的当前时刻平均斜率值l:
[0082][0083]
式中,如图3所示,ε为当前时刻拟合的巡线方向与前一时刻拟合的巡线方向的角度差值,a表示ε0对应的权值,a取值范围为(0,1),t表示时刻;
[0084]
同时,通过修正的当前时刻平均斜率值l计算需要无人机调整的航向偏差角∠β为:
[0085]
∠β=π-arctan-1
l
[0086]
如图4所示,最后通过使用模糊控制算法,实时输入航向偏差∠β来控制无人机巡线飞行调整航向角度,通过修正的当前时刻平均斜率值l实时输入无人机按照当前时刻的平均斜率值l(t)对应的巡线方向飞行。
[0087]
进一步的,待巡检任务结束后,无人机返回b地机库内进行充电,等待下一次巡检任务。
[0088]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于上面具体实施方式中描述的内容。任何
不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。