1.本发明涉及电机控制技术领域,具体涉及一种径向磁悬浮轴承自适应死区控制方法及系统。
背景技术:
2.磁轴承,是一种新型高性能轴承。与传统滚珠轴承、滑动轴承以及油膜轴承相比,磁轴承不存在机械接触,转子可以达到很高的运转速度,具有机械磨损小、能耗低、噪声小、寿命长、无需润滑、无油污染等优点,可广泛用于机械加工、涡轮机械、航空航天、真空技术、转子动力学特性辨识与测试等领域,被公认为极有前途的新型轴承。
3.径向磁轴承常用来使转子脱离保护轴承,稳定悬浮在空中,从而减小轴承的摩擦,提高转速与效率。
4.径向轴承力是使用多组电磁体建立的,其中一对电磁体连接至通过控制器所适与的功率放大器,以获得控制电压。然而,电机高速旋转时由于转子质心并不在几何中心,即质量不平衡,这将直接导致残余振动传递到基座,影响电机乃至周围设备的运转精度。
5.所以,如何减小转子振动是需要解决的问题。
技术实现要素:
6.本发明针对现有技术中存在的技术问题,提供一种径向磁悬浮轴承自适应死区控制方法及系统,通过增加死区来削减转子微小位移时的控制电流输出,从而解决了因转子质心不平衡引起的振动问题。
7.本发明解决上述技术问题的技术方案如下:
8.第一方面,本发明提供一种径向磁悬浮轴承自适应死区控制方法,包括:
9.采用自适应学习算法制作死区查询表,所述死区查询表包括多档位的位置数据、转速及其对应的最佳死区值;
10.采样转子悬浮状态下的位置数据与转速,根据当前位置数据与转速查询死区查询表中最佳死区值;
11.将最佳死区值作为电机位置环控制的输入,以控制磁悬浮轴承的控制电流。
12.进一步,采用自适应学习算法制作死区查询表的步骤包括:
13.电机运行至转子悬浮后,采样实时转速,当转速达到刚性临界转速后开始设置死区,维持电机转速稳定运行并记录对应的位置数据;
14.逐级增加转速档位直到达到停止条件,记录该死区值对应的每一档位转速以及位置数据;
15.逐级更换死区值直到达到停止条件,记录每级死区值对应的每一档位转速以及位置数据并生成死区查询表。
16.进一步,记录位置数据时,对得到的位置数据进行快速傅里叶变换,选择变换后结果更好的数据进行记录。
17.进一步,所述的逐级增加转速档位直到达到停止条件,包括:
18.按照预设的转速等级逐级增大转速,每增加一次转速后,维持电机转速稳定运行并记录对应的位置数据,直到达到预设的最大转速值或达到转速更改次数上限。
19.进一步,所述的逐级更换死区值直到达到停止条件,包括:
20.按照预设的死区系数等级逐级更改死区值,每更改一次死区值,记录该死区值对应的各个档位转速以及位置数据,直到达到预设的最大死区值或达到死区更改次数上限。
21.进一步,逐级更换死区值时,死区值与转速呈以下关系:
22.x=a1w a2w2
…
anwn,
23.其中,x为死区值,a1、a2
……
an为死区系数,w为转速,n为自然数。
24.进一步,所述的直到达到停止条件,还包括:对位置数据进行快速傅里叶变换后,变换得到的数据趋于理想值,则判定达到停止条件。
25.进一步,所述电机位置环采用pid控制或pd控制。
26.基于上述控制方法,本发明还提供一种控制系统,包括:
27.位移传感器,用于采样转子的位置数据;
28.转速传感器,用于采样转子的转速;
29.控制器,用于制作并储存死区查询表,所述死区查询表包括多档位的位置数据、转速及其对应的最佳死区值;还用于根据当前位置数据与转速查询死区查询表中最佳死区值,将最佳死区值作为电机位置环控制的输入,以控制磁悬浮轴承的控制电流。
30.本发明的有益效果是:本发明的控制系统及控制方法,在转子位置环控制中,通过增加死区来削减转子微小位移时的控制电流输出,从而解决了因转子质心不平衡引起的振动问题。通过预先采用自适应学习算法制作死区查询表,将其进行存储,在控制过程中,根据采样的当前转速与位置数据查询死区查询表,即可获得当前状况对应的最佳死区值,将最佳死区值加入位置环控制,以削减调整磁悬浮轴承的控制电流,从而实现对转子的微小位移控制。该控制方法与系统在不更改硬件设施的前提下,通过对控制方法进行改进,实现了转子位置环更加精准的控制。
附图说明
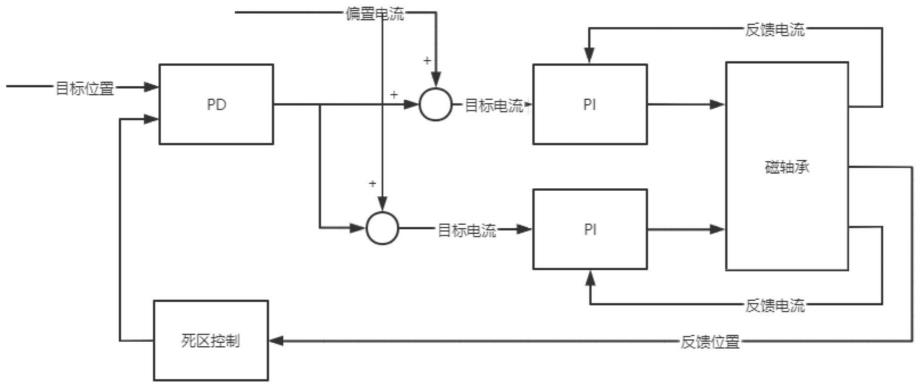
31.图1为本发明控制方法的原理框图;
32.图2为本发明控制方法主流程图;
33.图3为本发明采用自适应学习算法制作死区查询表的流程图。
具体实施方式
34.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
35.如图1所示为本发明的一种径向磁悬浮轴承自适应死区控制方法控制原理框图,图2为本控制方法的主流程图。如图1~2所示,本发明提供一种径向磁悬浮轴承自适应死区控制方法,包括:
36.采用自适应学习算法制作死区查询表,所述死区查询表包括多档位的位置数据、转速及其对应的最佳死区值;
37.采样转子悬浮状态下的位置数据与转速,根据当前位置数据与转速查询死区查询表中最佳死区值;
38.将最佳死区值作为电机位置环控制的输入,以控制磁悬浮轴承的控制电流。
39.可以理解的是,本实施例中,在转子位置环控制中,通过增加死区来削减转子微小位移时的控制电流输出,从而解决了因转子质心不平衡引起的振动问题。通过预先采用自适应学习算法制作死区查询表,将其进行存储,在控制过程中,根据采样的当前转速与位置数据查询死区查询表,即可获得当前状况对应的最佳死区值,将最佳死区值加入位置环控制,以削减调整磁悬浮轴承的控制电流,从而实现对转子的微小位移控制。该控制方法在不更改硬件设施的前提下,通过对控制方法进行改进,实现了转子位置环更加精准的控制,实施难度低,值得推广。
40.本实施例中,如图3所示为制作死区查询表的流程图,采用自适应学习算法制作死区查询表的步骤包括:
41.电机运行至转子悬浮后,采样实时转速,当转速达到刚性临界转速后开始设置死区,维持电机转速稳定运行并记录对应的位置数据;
42.逐级增加转速档位直到达到停止条件,记录该死区值对应的每一档位转速以及位置数据;
43.逐级更换死区值直到达到停止条件,记录每级死区值对应的每一档位转速以及位置数据并生成死区查询表。
44.可以理解的是,通过本实施例的方法,预先采集各种转速以及各个不同死区值对应的位置数据,将这些采集到的相对应的数据进行处理后,选择结果较好的数据进行保存、制作为查询表格,便于后续控制过程中进行查询,直接从表格中查找到更优的死区值,从而进行死区控制。
45.本实施例中,如图3所示,记录位置数据时,对得到的位置数据进行快速傅里叶变换(fft),对于得到的相邻的位置数据,选择变换后结果更好的数据进行记录,例如fft的数据趋于理想值。
46.本实施例中,所述的逐级增加转速档位直到达到停止条件,包括:
47.按照预设的转速等级逐级增大转速,每增加一次转速后,维持电机转速稳定运行并记录对应的位置数据,直到达到预设的最大转速值或达到转速更改次数上限。
48.本实施例中,所述的逐级更换死区值直到达到停止条件,包括:
49.按照预设的死区系数等级逐级更改死区值,每更改一次死区值,记录该死区值对应的各个档位转速以及位置数据,直到达到预设的最大死区值或达到死区更改次数上限。
50.本实施例中,逐级更换死区值时,死区值与转速呈以下关系:
51.x=a1w a2w2
…
anwn,
52.其中,x为死区值,a1、a2
……
an为死区系数,w为转速,n为自然数。
53.本实施例中,所述的直到达到停止条件,还包括:对位置数据进行快速傅里叶变换后,变换得到的数据趋于理想值,则判定达到停止条件。
54.如图1所示,所述电机位置环采用pid控制或pd控制。通过将最佳死区值加入位置环控制,以削减调整磁悬浮轴承的控制电流,从而实现对转子的微小位移控制。
55.基于上述控制方法,本发明还提供一种控制系统,包括:
56.位移传感器,用于采样转子的位置数据;
57.转速传感器,用于采样转子的转速;
58.控制器,用于制作并储存死区查询表,所述死区查询表包括多档位的位置数据、转速及其对应的最佳死区值;还用于根据当前位置数据与转速查询死区查询表中最佳死区值,将最佳死区值作为电机位置环控制的输入,以控制磁悬浮轴承的控制电流。
59.本发明的控制系统及控制方法,在转子位置环控制中,通过增加死区来削减转子微小位移时的控制电流输出,从而解决了因转子质心不平衡引起的振动问题。通过预先采用自适应学习算法制作死区查询表,将其进行存储,在控制过程中,根据采样的当前转速与位置数据查询死区查询表,即可获得当前状况对应的最佳死区值,将最佳死区值加入位置环控制,以削减调整磁悬浮轴承的控制电流,从而实现对转子的微小位移控制。该控制方法与系统在不更改硬件设施的前提下,通过对控制方法进行改进,实现了转子位置环更加精准的控制。
60.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。