1.本实用新型涉及机械工装技术领域,特别是涉及一种弯折装置
背景技术:
2.对于柔性显示屏,该柔性显示屏通常包括相互连接的刚性板和柔性件,在制作过程中,需要将柔性件翻转180
°
,从而将柔性件叠置在刚性板的上方。对于传统的弯折装置,通常直接将刚性板进行固定,然后将柔性件转动180
°
以进行弯折。但是,在柔性件的弯折过程中,柔性件和刚性板之间会存在较大的拉扯力,使得两者之间连接处会产生裂痕而形成断裂。
技术实现要素:
3.本实用新型解决的一个技术问题是如何避免工件在弯折过程中产生断裂。
4.一种弯折装置,用于对工件进行弯折以使工件的第一部分叠置在第二部分上,所述弯折装置包括:
5.弯折机构,包括承载平台、第一支架和第二支架,所述第一支架设置在所述承载平台和所述第二支架之间,所述承载平台用于承载所述第一部分并与所述第一支架转动连接,所述承载平台能够绕沿第一方向延伸的轴转动,所述第一支架与所述第二支架滑动连接,所述第一支架相对所述第二支架能够沿与所述第一方向呈夹角设置的第二方向滑动;及
6.对位机构,包括支撑平台,所述支撑平台用于承载所述第二部分。
7.在其中一个实施例中,所述弯折机构还包括固定座,所述第二支架与所述固定座滑动连接,所述第二支架能够相对所述固定座沿与所述第二方向呈夹角设置的第三方向滑动。
8.在其中一个实施例中,所述第一方向、所述第二方向和所述第三方向两两相互垂直。
9.在其中一个实施例中,所述弯折机构还包括电机,所述电机固定在所述第一支架上,所述承载平台与所述电机的转轴连接。
10.在其中一个实施例中,所述弯折机构还包括第一直线模组,所述第一直线模组固定在第二支架上并与所述第一支架连接,所述第一直线模组驱动所述第一支架滑动。
11.在其中一个实施例中,所述弯折机构还包括第二直线模组,所述第二直线模组固定在固定座上并与所述第二支架连接,所述第二直线模组驱动所述第二支架滑动。
12.在其中一个实施例中,所述对位机构还包括第三支架,所述支撑平台与所述第三支架转动连接,所述支撑平台能够绕沿所述第二方向延伸的轴转动。
13.在其中一个实施例中,所述对位机构还包括第四支架,所述第三支架设置在所述支撑平台和所述第三支架之间,所述第三支架与所述第四支架滑动连接,所述第三支架能够相对所述第四支架沿所述第一方向滑动。
14.在其中一个实施例中,所述对位机构还包括基座,所述第四支架与所述基座滑动连接,所述第四支架能够相对所述基座沿同时垂直所述第一方向和所述第二方向的第三方向滑动。
15.在其中一个实施例中,还包括如下方案中的至少一项:
16.所述对位机构还包括第三直线模组,所述第三直线模组设置在所述第四支架上并与所述第三支架连接,所述第三直线模组用于驱动所述第三支架滑动;
17.所述对位机构还包括第四直线模组,所述第四直线模组设置在所述基座上并与所述第四支架连接,所述第四直线模组用于驱动所述第四支架滑动。
18.本实用新型的一个实施例的一个技术效果是:鉴于承载平台能够绕沿第一方向延伸的轴转动,第一支架相对第二支架能够沿与第一方向呈夹角设置的第二方向滑动,在承载平台带动第一部分相对第二部分逐渐转动的过程中,第一支架相对第二支架产生滑动,从而提高第一部分转动路径的精确度,控制工件的应力大小,避免第一部分在转动过程中与第二部分之间产生较大的拉扯力,防止第一部分在较大拉扯力作用下脱离第二部分而使工件产生断裂。
附图说明
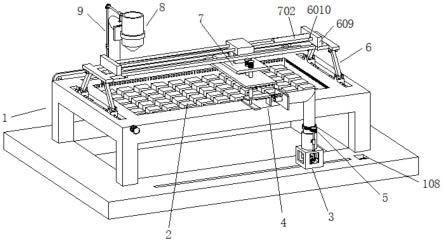
19.图1为一实施例提供的弯折装置的立体结构示意图;
20.图2为图1所示弯折装置在第一视角下的分解结构示意图;
21.图3为图1所示弯折装置在第二视角下的分解结构示意图。
具体实施方式
22.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳实施方式。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本实用新型的公开内容理解的更加透彻全面。
23.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“内”、“外”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
24.参阅图1、图2和图3,本实用新型一实施例提供的一种弯折装置10用于对工件进行弯折,以使工件从初始状态转化为弯折状态。工件包括相互连接的第一部分和第二部分,在工件处于弯折之前的初始状态,第一部分和第二部分沿水平设置,可以看成第一部分和第二部分位于同一平面内,第一部分的上表面朝上设置。当使第二部分固定,且使第一部分相对第二部分转动180
°
之后,工件将处于弯折状态,此时第一部分和第二部分沿竖直方向设置,第一部分的上表面朝下设置,使得第一部分叠置在第二部分的上方。工件可以为柔性屏幕,该第一部分可以为柔性屏幕的柔性电路板,第二部分可以为柔性屏幕的刚性面板。弯折装置10包括弯折机构100和对位机构200。
25.在一些实施例中,弯折机构100包括承载平台110、第一支架121、第二支架122、固定座130、电机140、第一直线模组151和第二直线模组152。固定座130固定设置,第一支架
121位于承载平台110和第二支架122之间,第二支架122位于第一支架121和固定座130之间。
26.承载平台110用于承载工件的第一部分,该第一部分可以通过真空吸附的方式固定在承载平台110上。承载平台110与第一支架121转动连接,电机140 设置在第一支架121上,电机140的转轴与承载平台110连接,使得电机140 能够驱动承载平台110转动。承载平台110绕沿第一方向延伸的轴产生转动,该第一方向可以为空间直角坐标系中x轴方向,该x轴方向也即前后方向。当承载平台110转动时,第一部分将跟随承载平台110产生转动,在第二部分固定不动的情况下,第一部分将相对第二部分产生转动,最终实现整个工件的弯折。
27.在一些实施例中,第一支架121与第二支架122滑动连接,第一直线模组 151设置在第二支架122上,第一直线模组151与第一支架121连接,第一直线模组151用于驱动第一支架121相对第二支架122滑动,第一支架121相对第二支架122的滑动的方向即为第二方向,该第二方向可以垂直第一方向设置,第二方向可以为空间直角坐标系中z轴方向,该z轴方向也即上下方向。通俗而言,第一直线模组151驱动第一支架121相对第二支架122在上下方向往复运动。
28.在一些实施例中,第二支架122与固定座130滑动连接,第二直线模组152 设置在固定座130上,第二直线模组152与第二支架122连接,第二直线模组 152用于驱动第二支架122相对固定座130滑动,第二支架122相对固定座130 的滑动的方向即为第三方向,该第三方向可以同时垂直第一方向和第二方向设置,第三方向可以为空间直角坐标系中y轴方向,该y轴方向也即左右方向。通俗而言,第二直线模组152驱动第二支架122相对固定座130在前后方向往复运动。
29.基于电机140、第一直线模组151和第二直线模组152的存在,使得承载平台110既可以绕x轴相对固定座130产生转动,又可以沿z轴相对固定座130 产生上下滑动,还可以沿y轴相对固定座130产生左右滑动。即承载平台110 具有三个自由度。
30.在一些实施例中,对位机构200包括支撑平台210、第三支架223、第四支架224、基座230、驱动器240、第三直线模组253和第四直线模组254。基座 230固定设置,第三支架223设置在支撑平台210和第四支架224之间,第四支架224位于第三支架223和基座230之间。
31.在一些实施例中,支撑平台210用于支撑工件的第二部分,该第二部分可以通过真空吸附的方式固定在支撑平台210上。支撑平台210与第三支架223 转动连接,驱动器240设置在第三支架223上,驱动器240用于驱动支撑平台 210产生转动。支撑平台210绕第二方向转动,也即空间直角坐标系中z轴方向,也即上下方向。
32.在一些实施例中,第三支架223与第四支架224滑动连接,第三直线模组 253设置在第四支架224上,第三直线模组253与第三支架223连接,第三直线模组253用于驱动第三支架223相对第四支架224滑动,第三支架223相对第四支架224的滑动的方向即为第一方向,该第一方向可以为空间直角坐标系中x 轴方向,该x轴方向也即前后方向。通俗而言,第三直线模组253驱动第三支架223相对第四支架224在前后方向往复运动。
33.在一些实施例中,第四支架224与基座230滑动连接,第四直线模组254 设置在基座230上,第四直线模组254与第四支架224连接,第四直线模组254 用于驱动第四支架224相对基座230滑动,第四支架224相对基座230的滑动的方向即为第三方向,该第三方向为空间直角坐标系中y轴方向,该y轴方向也即左右方向。通俗而言,第四直线模组254驱动第四
支架224相对基座230 在左右方向往复运动。
34.因此,基于驱动器240、第三直线模组253和第四直线模组254的存在,使得支撑平台210既可以绕z轴相对基座230产生转动,又可以沿x轴相对基座 230产生前后滑动,还可以沿y轴相对基座230产生左右滑动。即支撑平台210 具有三个自由度。
35.下面介绍弯折装置10的工作原理:
36.第一步,将工件的第一部分放置在场承载平台110上,且通过真空吸附的方式将第一部分与承载平台110固定连接。将工件的第二部分放置在支撑平台 210上,且通过真空吸附的方式将第二部分与支撑平台210固定连接。
37.第二步,电机140、第一直线模组151和第二直线模组152同时工作,在电机140带动承载平台110以使第一部分相对第二部分逐渐转动的过程中,第一直线模组151驱动第一支架121上下滑动,第二直线模组152驱动第二支架122 左右滑动,从而使得第一部分的沿着圆形轨迹产生转动,提高第一部分的转动路径的精确度,控制工件的应力大小,避免第一部分在转动过程中与第二部分之间产生较大的拉扯力,防止第一部分在较大拉扯力作用下脱离第二部分而使工件产生断裂。当承载平台110转动180
°
以带动第一部分运动到第二部分的上方时,承载平台110停止运动。
38.第三步,对位机构200开始工作,使得支撑平台210相对承载平台110产生运动,继而使得第二部分相对第一部分产生运动,从而调整第二部分相对第一部分的摆放位置,提高第一部分和第二部分之间的对位精度,以便后续第一部分准确贴附在第二部分的设定位置处,提高第一部分和第二部分之间的贴合精度。鉴于支撑平台210既可以绕z轴相对基座230产生转动,又可以沿x轴相对基座230产生前后滑动,还可以沿y轴相对基座230产生左右滑动,即支撑平台210具有三个自由度,故第二部分同样具有三个自由度。因此,在支撑平台210的运动过程中,可以将第二部分运动到指定的位置,确保第一部分和第二部分之间有较高的对位精度,最终提高后续第一部分和第二部分之间的贴合精度。因此,通过设置对位机构200,并使支撑平台210具有三个自由度,在工件处于弯折状态的情况下,可以提高第一部分和第二部分之间的对位精度和贴合精度,例如可以保证误差在0.05mm之内。故弯折机构100可以防止工件在弯折过程中产生断裂,而对位机构200可以提高工件弯折后第一部分和第二部分之间的对位精度和贴合精度。
39.因此,在工件的弯折过程中,通过设置弯折机构100,可以防止工件的第一部分和第二部分之间产生裂纹而使工件断裂,提高工件的弯折精度、良率和安全性。当工件弯折完成之后,在对位机构200的作用下,可以使得支撑平台210 相对承载平台110产生三个自由度的运动,从而有效调整第二部分相对第一部分之间的位置,提高第二部分和第一部分之间的对位精度。
40.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
41.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。