1.本发明属于医疗器械技术领域,尤其涉及一种高柔性外骨骼型机器人。
背景技术:
2.外骨骼机器人技术是融合传感、控制、信息、融合、移动计算,为作为操作者的人提供一种可穿戴的机械机构的综合技术,本文简要介绍了军事领域外骨骼世界机器人技术的发展现状与趋势,是指套在人体外面的机器人,也称“可穿戴的机器。
3.外骨骼机器人是目前常见,且极为有效的辅助性医疗器械,目前,传统的腿关节用外骨骼机器人在使用的过程中仍存有一些不足之处,其锻炼程度无法实现较为行之有效的控制,很难在腿关节的多个康复阶段提供不同程度的锻炼强度,不利于患者的康复,且无法及时的将患者肌组织因锻炼所产生的酸性物质疏导开来,极容易在锻炼后引发不适感,因此,现阶段市场上亟需一种高柔性外骨骼型机器人来解决上述问题。
技术实现要素:
4.本发明的目的在于:为了解决传统的腿关节用外骨骼机器人在使用的过程中仍存有一些不足之处,其锻炼程度无法实现较为行之有效的控制,很难在腿关节的多个康复阶段提供不同程度的锻炼强度,不利于患者的康复,且无法及时的将患者肌组织因锻炼所产生的酸性物质疏导开来,极容易在锻炼后引发不适感的问题,而提出的一种高柔性外骨骼型机器人。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种高柔性外骨骼型机器人,包括机座,所述机座的顶部滑动连接有可调式连接座,并且机座顶部对应可调式连接座的位置处开设有第一滑行连接槽,所述第一滑行连接座内滑动连接有第一滑行连接座,所述第一滑行连接座和可调式连接座的相对面固定连接,所述可调式连接座的内部固定连接有固定式套筒,所述固定式套筒的侧方位设置有活动式套筒,所述活动式套筒和固定式套筒的内部均套接有记忆棉垫,所述活动式套筒的底部开设有第二滑行连接槽,所述第二滑行连接槽内滑动连接有第二滑行连接座,所述第二滑行连接座的下方和可调式连接座的侧方位设置有同一个液压缸,所述活动式套筒靠近固定式套筒的一端固定连接有活动架,所述活动架上固定连接有第三转接轴,所述第三转接轴的表面固定连接有主动锥齿轮,所述主动锥齿轮的表面啮合有从动锥齿轮,所述从动锥齿轮固定连接在第四转接轴的表面,所述第四转接轴位于固定式套筒侧端面所开设的凹型连接槽内。
7.作为上述技术方案的进一步描述:
8.所述机座的数量为两个,且两个机座相对面的边沿处通过弹性合页铰接,且两个机座互相远离的一面均固定连接有手柄。
9.作为上述技术方案的进一步描述:
10.所述第一滑行连接槽内设置有第一螺纹杆,所述第一螺纹杆的数量为两个,且两
个第一螺纹杆表面的螺纹方向相反,且两个第一螺纹杆互相远离的一端均固定连接有第一转接轴,且两个第一转接轴的表面均套接有第一轴承,且两个第一轴承分别卡接在两个第一滑行连接槽内侧的端面上,且其中一个第一转接轴的表面固定连接有轮盘。
11.作为上述技术方案的进一步描述:
12.所述第一螺纹杆的端部开设有伸缩式连接槽,所述伸缩式连接槽内套接有桥型连接架,所述桥型连接架的端部通过第一支撑弹簧与伸缩式连接槽内侧的端面固定连接,且其中一个桥型连接架远离第一螺纹杆的一端开设有转接槽,所述转接槽内套接有转接件,所述转接件的表面通过第一销轴与转接槽的内侧壁铰接,所述转接件远离转接槽的一端与另一个第一螺纹杆相近的一端固定连接,所述第一螺纹杆的表面螺纹连接有第一螺纹筒,所述第一螺纹筒卡接在第一滑行连接座的侧端面上。
13.作为上述技术方案的进一步描述:
14.所述第二滑行连接座的侧端面固定连接有第二支撑弹簧,所述第二支撑弹簧远离第二滑行连接座的一端固定连接有第二螺纹筒,所述第二螺纹筒内螺纹连接有第二螺纹杆,所述第二螺纹杆远离第二螺纹筒的一端固定连接有第二转接轴,所述第二转接轴的表面套接有第二轴承,所述第二轴承卡接在第二滑行连接槽内侧的端面上,所述第二转接轴远离第二支撑弹簧的一端固定连接有旋钮。
15.作为上述技术方案的进一步描述:
16.所述第二滑行连接座的底部固定连接有第一凸缘,所述第一凸缘的表面通过第二销轴与第二凸缘相近的一面铰接,所述第二凸缘的侧端面与液压缸相近的一端固定连接。
17.作为上述技术方案的进一步描述:
18.所述液压缸的另一端固定连接有第三凸缘,所述第三凸缘的表面通过第三销轴与第四凸缘相近的一面铰接,所述第四凸缘的底部与可调式连接座的侧端面固定连接。
19.作为上述技术方案的进一步描述:
20.所述第三转接轴的表面套接有第三轴承,所述第三轴承卡接在固定座的表面,所述固定座的侧端面与可调式连接座相近的一面固定连接。
21.作为上述技术方案的进一步描述:
22.所述第四转接轴的表面套接有第四轴承,所述第四轴承卡接在轴承座的侧端面上,所述轴承座的端部与凹型连接槽的内侧壁固定连接。
23.作为上述技术方案的进一步描述:
24.所述第四转接轴的表面固定连接有凸轮,并且固定式套筒内侧壁对应凸轮的位置处开设有伸缩孔,所述伸缩孔内套接有按摩凸粒,所述按摩凸粒背离记忆棉垫的一端固定连接有弧形座,所述弧形座的端部通过第三支撑弹簧与凹型连接槽内侧的端面固定连接,所述第四转接轴的表面固定连接有驱动轮,且若干个驱动轮之间通过皮带传动连接。
25.综上所述,由于采用了上述技术方案,本发明的有益效果是:
26.1、本发明中,通过设计的弹性合页、第一螺纹杆、第一螺纹筒、液压缸、第二支撑弹簧、第二螺纹筒、第二螺纹杆、主动锥齿轮、从动锥齿轮以及凸轮等结构的互相配合下,整个设备的收纳以及携带简单快捷,方便患者在各种合适的场所下进行护理锻炼,更有利于患者的康复,并便能够根据患者的腿型调整两个活动式连接座之间的位置关系,因而可为患者提供更加优质的服务体验,更有利于患者的康复,可实现对患者腿部的锻炼,且在锻炼的
过程中,腿部不会受到患者上半身重量的压迫,有效缓解了前期由于伤势较重而引发二次伤害,实现多频段的锻炼效果,更加有利于患者的康复。
27.2、本发明中,通过设计的弹性合页、转接槽、转接件、伸缩式连接槽、桥型连接架和第一销轴,两个机座能够通过弹性合页发生开合动作,且由于两个机座之间通过弹性合页发生开合动作的过程中,两个桥型连接架以转接件和转接槽作为连接媒介,并利用转接件和转接槽以第一销轴为轴心发生旋转动作,与此同时,桥型连接架在伸缩式连接槽内进行相应的伸缩动作,使得整个设备的收纳以及携带简单快捷,方便患者在各种合适的场所下进行护理锻炼,更有利于患者的康复。
28.3、本发明中,通过设计的第一螺纹杆、第一螺纹筒、轮盘、第一滑行连接座和第一滑行连接槽,向轮盘施加扭力,便可带动其中一个第一转接轴在第一轴承内发生转动,使第一螺纹杆在第一螺纹筒内进行同步旋转动作,在扭力以及螺纹筒咬合力的共同作用效果下,便可使第一螺纹筒在第一螺纹杆的表面发生位移,且由于第一螺纹筒以第一滑行连接座和第一滑行连接座作为与可调式连接座之间的连接媒介,便能够根据患者的腿型调整两个活动式连接座之间的位置关系,因而可为患者提供更加优质的服务体验,更有利于患者的康复。
29.4、本发明中,通过设计的液压缸、第二销轴、第三销轴、第二滑行连接座和第三滑行连接座,控制液压缸运行,由于液压缸的两个端部可分别以第二销轴和第三销轴为圆心发生旋转动作,而液压缸的端部在进行伸缩动作的过程中还会带动第二滑行连接座在第二滑行连接槽内进行相应的滑行动作,因此便可利用液压缸的伸缩动作带动活动式套筒以第四转接轴为轴心进行往复式俯仰动作,因此,便可实现对患者腿部的锻炼,且在锻炼的过程中,腿部不会受到患者上半身重量的压迫,有效缓解了前期由于伤势较重而引发二次伤害。
30.5、本发明中,通过设计的第二支撑弹簧、第二螺纹筒、第二螺纹杆、旋钮、第二转接轴和第二轴承,拨动旋钮带动第二转接轴在第二轴承内发生转动,在扭力以及螺纹咬合力的共同作用效果下,便可使第二螺纹筒在第二螺纹杆的表面发生位于,通过控制在初始状态下第二支撑弹簧的形变量,即硬度,利用第二支撑弹簧的缓冲效应,能够控制液压缸在运转的过程中可调式套筒进行俯仰动作过程中的快慢,实现多频段的锻炼效果,更加有利于患者的康复。
31.6、本发明中,通过设计的主动锥齿轮、从动锥齿轮、凸轮、第三支撑弹簧、按摩凸粒、记忆棉垫和伸缩孔,记忆棉垫能够起到防护效果,防止患者在将腿部伸入固定式套筒和活动式套筒内部的过程中发生腿部的碰伤事件,从而可对患者的腿部起到良好的保护效果,活动式套筒在通过第三转接轴在第三轴承内发生俯仰动作的过程中,能够利用主动锥齿轮和从动锥齿轮将扭力转嫁至第四转接轴上,并利用第四转接轴带动凸轮发生旋转动作,辅以第三支撑弹簧和弧形座,能够带动按摩凸粒在伸缩孔内进行循环往复的伸缩动作,实现对患者腿部的按摩动作,有效疏解患者腿部因锻炼肌肉中所产生的酸性物质,更有利于患者的康复。
附图说明
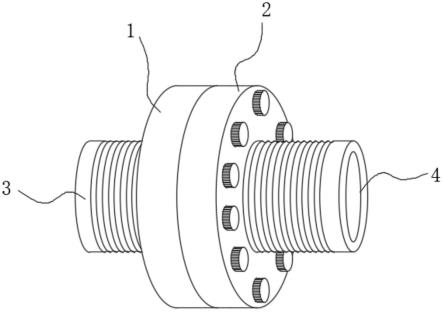
32.图1为本发明提出的一种高柔性外骨骼型机器人的立体结构示意图;
33.图2为本发明提出的一种高柔性外骨骼型机器人中a处放大的结构示意图;
34.图3为本发明提出的一种高柔性外骨骼型机器人中b处放大的结构示意图;
35.图4为本发明提出的一种高柔性外骨骼型机器人中桥型连接架和第一螺纹杆的组合结构示意图;
36.图5为本发明提出的一种高柔性外骨骼型机器人桥型连接架的立体结构示意图;
37.图6为本发明提出的一种高柔性外骨骼型机器人中活动式套筒的立体结构示意图;
38.图7为本发明提出的一种高柔性外骨骼型机器人中液压缸的立体结构示意图;
39.图8为本发明提出的一种高柔性外骨骼型机器人中固定式套筒的立体结构示意图;
40.图9为本发明提出的一种高柔性外骨骼型机器人中凸轮的立体结构示意图;
41.图10为本发明提出的一种高柔性外骨骼型机器人中按摩凸粒的立体结构示意图;
42.图11为本发明提出的一种高柔性外骨骼型机器人中固定式套筒和活动式套筒的组合结构示意图;
43.图12为本发明提出的一种高柔性外骨骼型机器人中c处放大的结构示意图。
44.图例说明:
45.1、机座;2、弹性合页;3、手柄;4、可调式连接座;5、第一滑行连接座;6、第一滑行连接槽;7、第一螺纹筒;8、第一螺纹杆;9、第一转接轴;10、第一轴承;11、轮盘;12、伸缩式连接槽;13、桥型连接架;14、第一支撑弹簧;15、转接槽;16、转接件;17、第一销轴;18、固定式套筒;19、记忆棉垫;20、活动式套筒;21、第二滑行连接槽;22、第二滑行连接座;23、第二支撑弹簧;24、第二螺纹筒;25、第二螺纹杆;26、第二转接轴;27、第二轴承;28、旋钮;29、第一凸缘;30、第二销轴;31、第二凸缘;32、液压缸;33、第三凸缘;34、第三销轴;35、第四凸缘;36、活动架;37、第三转接轴;38、第三轴承;39、固定座;40、主动锥齿轮;41、从动锥齿轮;42、第四转接轴;43、第四轴承;44、轴承座;45、凸轮;46、驱动轮;47、皮带;48、伸缩孔;49、按摩凸粒;50、弧形座;51、第三支撑弹簧;52、凹型连接槽。
具体实施方式
46.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
47.请参阅图1-12,本发明提供一种技术方案:一种高柔性外骨骼型机器人,包括机座1,机座1的顶部滑动连接有可调式连接座4,并且机座1顶部对应可调式连接座4的位置处开设有第一滑行连接槽6,第一滑行连接座5内滑动连接有第一滑行连接座5,第一滑行连接座5和可调式连接座4的相对面固定连接,可调式连接座4的内部固定连接有固定式套筒18,固定式套筒18的侧方位设置有活动式套筒20,活动式套筒20和固定式套筒18的内部均套接有记忆棉垫19,活动式套筒20的底部开设有第二滑行连接槽21,第二滑行连接槽21内滑动连接有第二滑行连接座22,第二滑行连接座22的下方和可调式连接座4的侧方位设置有同一个液压缸32,活动式套筒20靠近固定式套筒18的一端固定连接有活动架36,活动架36上固定连接有第三转接轴37,第三转接轴37的表面固定连接有主动锥齿轮40,主动锥齿轮40的
表面啮合有从动锥齿轮41,通过设计的主动锥齿轮40、从动锥齿轮41、凸轮45、第三支撑弹簧51、按摩凸粒49、记忆棉垫19和伸缩孔48,记忆棉垫19能够起到防护效果,防止患者在将腿部伸入固定式套筒18和活动式套筒20内部的过程中发生腿部的碰伤事件,从而可对患者的腿部起到良好的保护效果,活动式套筒20在通过第三转接轴37在第三轴承38内发生俯仰动作的过程中,能够利用主动锥齿轮40和从动锥齿轮41将扭力转嫁至第四转接轴42上,并利用第四转接轴42带动凸轮45发生旋转动作,辅以第三支撑弹簧51和弧形座50,能够带动按摩凸粒49在伸缩孔48内进行循环往复的伸缩动作,实现对患者腿部的按摩动作,有效疏解患者腿部因锻炼肌肉中所产生的酸性物质,更有利于患者的康复,从动锥齿轮41固定连接在第四转接轴42的表面,第四转接轴42位于固定式套筒18侧端面所开设的凹型连接槽52内。
48.具体的,机座1的数量为两个,且两个机座1相对面的边沿处通过弹性合页2铰接,且两个机座1互相远离的一面均固定连接有手柄3,通过设计的弹性合页2、转接槽15、转接件16、伸缩式连接槽12、桥型连接架13和第一销轴17,两个机座1能够通过弹性合页2发生开合动作,且由于两个机座1之间通过弹性合页2发生开合动作的过程中,两个桥型连接架13以转接件16和转接槽15作为连接媒介,并利用转接件16和转接槽15以第一销轴17为轴心发生旋转动作,与此同时,桥型连接架13在伸缩式连接槽12内进行相应的伸缩动作,使得整个设备的收纳以及携带简单快捷,方便患者在各种合适的场所下进行护理锻炼,更有利于患者的康复。
49.具体的,第一滑行连接槽6内设置有第一螺纹杆8,第一螺纹杆8的数量为两个,且两个第一螺纹杆8表面的螺纹方向相反,且两个第一螺纹杆8互相远离的一端均固定连接有第一转接轴9,且两个第一转接轴9的表面均套接有第一轴承10,且两个第一轴承10分别卡接在两个第一滑行连接槽6内侧的端面上,且其中一个第一转接轴9的表面固定连接有轮盘11。
50.具体的,第一螺纹杆8的端部开设有伸缩式连接槽12,伸缩式连接槽12内套接有桥型连接架13,桥型连接架13的端部通过第一支撑弹簧14与伸缩式连接槽12内侧的端面固定连接,且其中一个桥型连接架13远离第一螺纹杆8的一端开设有转接槽15,转接槽15内套接有转接件16,转接件16的表面通过第一销轴17与转接槽15的内侧壁铰接,转接件16远离转接槽15的一端与另一个第一螺纹杆8相近的一端固定连接,第一螺纹杆8的表面螺纹连接有第一螺纹筒7,第一螺纹筒7卡接在第一滑行连接座5的侧端面上,通过设计的第一螺纹杆8、第一螺纹筒7、轮盘11、第一滑行连接座5和第一滑行连接槽6,向轮盘11施加扭力,便可带动其中一个第一转接轴9在第一轴承10内发生转动,使第一螺纹杆8在第一螺纹筒7内进行同步旋转动作,在扭力以及螺纹筒咬合力的共同作用效果下,便可使第一螺纹筒7在第一螺纹杆8的表面发生位移,且由于第一螺纹筒7以第一滑行连接座5和第一滑行连接座5作为与可调式连接座4之间的连接媒介,便能够根据患者的腿型调整两个活动式连接座之间的位置关系,因而可为患者提供更加优质的服务体验,更有利于患者的康复。
51.具体的,第二滑行连接座22的侧端面固定连接有第二支撑弹簧23,第二支撑弹簧23远离第二滑行连接座22的一端固定连接有第二螺纹筒24,第二螺纹筒24内螺纹连接有第二螺纹杆25,第二螺纹杆25远离第二螺纹筒24的一端固定连接有第二转接轴26,第二转接轴26的表面套接有第二轴承27,第二轴承27卡接在第二滑行连接槽21内侧的端面上,第二
转接轴26远离第二支撑弹簧23的一端固定连接有旋钮28,通过设计的第二支撑弹簧23、第二螺纹筒24、第二螺纹杆25、旋钮28、第二转接轴26和第二轴承27,拨动旋钮28带动第二转接轴26在第二轴承27内发生转动,在扭力以及螺纹咬合力的共同作用效果下,便可使第二螺纹筒24在第二螺纹杆25的表面发生位于,通过控制在初始状态下第二支撑弹簧23的形变量,即硬度,利用第二支撑弹簧23的缓冲效应,能够控制液压缸32在运转的过程中可调式套筒进行俯仰动作过程中的快慢,实现多频段的锻炼效果,更加有利于患者的康复。
52.具体的,第二滑行连接座22的底部固定连接有第一凸缘29,第一凸缘29的表面通过第二销轴30与第二凸缘31相近的一面铰接,第二凸缘31的侧端面与液压缸32相近的一端固定连接。
53.具体的,液压缸32的另一端固定连接有第三凸缘33,第三凸缘33的表面通过第三销轴34与第四凸缘35相近的一面铰接,第四凸缘35的底部与可调式连接座4的侧端面固定连接,通过设计的液压缸32、第二销轴30、第三销轴34、第二滑行连接座22和第三滑行连接座,控制液压缸32运行,由于液压缸32的两个端部可分别以第二销轴30和第三销轴34为圆心发生旋转动作,而液压缸32的端部在进行伸缩动作的过程中还会带动第二滑行连接座22在第二滑行连接槽21内进行相应的滑行动作,因此便可利用液压缸32的伸缩动作带动活动式套筒20以第四转接轴42为轴心进行往复式俯仰动作,因此,便可实现对患者腿部的锻炼,且在锻炼的过程中,腿部不会受到患者上半身重量的压迫,有效缓解了前期由于伤势较重而引发二次伤害。
54.具体的,第三转接轴37的表面套接有第三轴承38,第三轴承38卡接在固定座39的表面,固定座39的侧端面与可调式连接座4相近的一面固定连接。
55.具体的,第四转接轴42的表面套接有第四轴承43,第四轴承43卡接在轴承座44的侧端面上,轴承座44的端部与凹型连接槽52的内侧壁固定连接。
56.具体的,第四转接轴42的表面固定连接有凸轮45,并且固定式套筒18内侧壁对应凸轮45的位置处开设有伸缩孔48,伸缩孔48内套接有按摩凸粒49,按摩凸粒49背离记忆棉垫19的一端固定连接有弧形座50,弧形座50的端部通过第三支撑弹簧51与凹型连接槽52内侧的端面固定连接,第四转接轴42的表面固定连接有驱动轮46,且若干个驱动轮46之间通过皮带47传动连接。
57.工作原理:使用时,两个机座1能够通过弹性合页2发生开合动作,且由于两个机座1之间通过弹性合页2发生开合动作的过程中,两个桥型连接架13以转接件16和转接槽15作为连接媒介,并利用转接件16和转接槽15以第一销轴17为轴心发生旋转动作,与此同时,桥型连接架13在伸缩式连接槽12内进行相应的伸缩动作,使得整个设备的收纳以及携带简单快捷,方便患者在各种合适的场所下进行护理锻炼,更有利于患者的康复,向轮盘11施加扭力,便可带动其中一个第一转接轴9在第一轴承10内发生转动,使第一螺纹杆8在第一螺纹筒7内进行同步旋转动作,在扭力以及螺纹筒咬合力的共同作用效果下,便可使第一螺纹筒7在第一螺纹杆8的表面发生位移,且由于第一螺纹筒7以第一滑行连接座5和第一滑行连接座5作为与可调式连接座4之间的连接媒介,便能够根据患者的腿型调整两个活动式连接座之间的位置关系,因而可为患者提供更加优质的服务体验,更有利于患者的康复,控制液压缸32运行,由于液压缸32的两个端部可分别以第二销轴30和第三销轴34为圆心发生旋转动作,而液压缸32的端部在进行伸缩动作的过程中还会带动第二滑行连接座22在第二滑行连
接槽21内进行相应的滑行动作,因此便可利用液压缸32的伸缩动作带动活动式套筒20以第四转接轴42为轴心进行往复式俯仰动作,因此,便可实现对患者腿部的锻炼,且在锻炼的过程中,腿部不会受到患者上半身重量的压迫,有效缓解了前期由于伤势较重而引发二次伤害,拨动旋钮28带动第二转接轴26在第二轴承27内发生转动,在扭力以及螺纹咬合力的共同作用效果下,便可使第二螺纹筒24在第二螺纹杆25的表面发生位于,通过控制在初始状态下第二支撑弹簧23的形变量,即硬度,利用第二支撑弹簧23的缓冲效应,能够控制液压缸32在运转的过程中可调式套筒进行俯仰动作过程中的快慢,实现多频段的锻炼效果,更加有利于患者的康复,记忆棉垫19能够起到防护效果,防止患者在将腿部伸入固定式套筒18和活动式套筒20内部的过程中发生腿部的碰伤事件,从而可对患者的腿部起到良好的保护效果,活动式套筒20在通过第三转接轴37在第三轴承38内发生俯仰动作的过程中,能够利用主动锥齿轮40和从动锥齿轮41将扭力转嫁至第四转接轴42上,并利用第四转接轴42带动凸轮45发生旋转动作,辅以第三支撑弹簧51和弧形座50,能够带动按摩凸粒49在伸缩孔48内进行循环往复的伸缩动作,实现对患者腿部的按摩动作,有效疏解患者腿部因锻炼肌肉中所产生的酸性物质,更有利于患者的康复。
58.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。