技术特征:
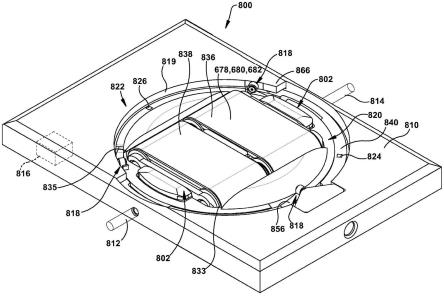
1.一种用于机器人(108)的牵引模块(114,240,242,244,660,662,664),所述牵引模块(114,240,242,244,660,662,664)包括:外部框架(666,668,670,810);旋转框架(820),所述旋转框架可旋转地安装在所述外部框架(666,668,670,810)内;驱动系统(802),所述驱动系统操作地联接到旋转框架(820)并且被配置成驱动牵引驱动部件(678,680,682)以推进所述机器人(108);和致动器(822),所述致动器操作地连接到所述旋转框架(820)以使所述旋转框架(820)可控地旋转,从而:在所述旋转框架(820)的旋转移动的第一部分期间,致使所述驱动系统(802)在第一位置与第二位置之间移动,所述第一位置相对于所述外部框架(810),在所述第二位置中,所述驱动系统(802)从所述外部框架(810)向外延伸至大于在所述第一位置中的程度,并且在所述旋转框架(820)的所述旋转移动的第二部分期间,将所述驱动系统(802)定位在期望的取向上以推进所述机器人(108)。2.根据权利要求1所述的牵引模块(114,240,242,244,660,662,664),其中所述外部框架(810)包括从所述外部框架(810)的内周边(819)径向向内延伸的多个固定凸轮(818);并且其中所述旋转框架(820)包括:针对所述外部框架(810)中的旋转移动定位的外部圆形构件(840);操作地联接到所述驱动系统(802)的内部构件(842),所述内部构件(842)包括在所述内部构件(842)的周向面(852)上暴露的多个凹槽(850),每个凹槽(850)部分地围绕所述内部构件(842)的所述周向面(852)延伸并且包括:第一区段(854),所述第一区段具有斜坡(856),所述斜坡被配置成在所述旋转框架(820)的所述旋转移动的所述第一部分期间与相应固定凸轮(818)相互作用,以在所述第一位置与所述第二位置之间移动所述驱动系统(802);和第二区段(858),所述第二区段与所述第一区段(854)接续并且被配置成在所述旋转框架(820)的所述旋转移动的所述第二部分期间与所述相应固定凸轮(818)相互作用,以将所述驱动系统(802)旋转到所述期望的取向。3.根据权利要求2所述的牵引模块(114,240,242,244,660,662,664),其中所述致动器(822)包括用于向所述外部圆形构件(840)施加旋转力以引起所述旋转框架(820)的所述旋转移动的马达。4.根据权利要求3所述的牵引模块(114,240,242,244,660,662,664),还包括引导系统(844),所述引导系统包括位于所述外部圆形构件(840)上的第一元件(846)和位于所述内部构件(842)上的配合第二元件(848),所述第一元件和所述第二元件(846,848)被配置成随着所述内部构件(842)从所述第一位置移动到所述第二位置而允许所述内部构件(842)相对于所述外部圆形构件(840)的非旋转伸缩移动。5.根据权利要求4所述的牵引模块(114,240,242,244,660,662,664),其中:在所述旋转框架(820)的所述旋转移动的所述第一部分期间所述内部构件(842)和所述驱动系统(802)从所述第一位置移动到所述第二位置:每个固定凸轮(818)与相应凹槽(850)的所述第一区段(854)的所述斜坡(856)接合,并且所述引导系统(844)的所述第一元
件和所述第二元件(846,848)允许所述内部构件(842)相对于所述外部圆形构件(840)的非旋转伸缩移动;以及在所述旋转框架(820)的所述旋转移动的所述第二部分期间:每个固定凸轮(818)与相应凹槽(850)的所述第二区段(858)接合,以将所述驱动系统(802)旋转到所述期望的取向。6.根据权利要求3所述的牵引模块(114,240,242,244,660,662,664),其中所述第一元件(846)包括位于所述外部圆形构件(840)的内周边(819)上的狭槽,并且所述第二元件(846,848)包括从所述内部构件(842)的外周边(864)延伸并且被配置成在相应狭槽中滑动地移动的引导元件。7.根据权利要求2所述的牵引模块(114,240,242,244,660,662,664),还包括偏置构件(828)以迫使所述内部构件(842)朝向所述第二位置。8.根据权利要求2所述的牵引模块(114,240,242,244,660,662,664),其中每个凹槽(850)延伸约120度总弧度并且所述第一区段(854)包括所述120度总弧度的20度至25度。9.根据权利要求1所述的牵引模块(114,240,242,244,660,662,664),其中所述驱动系统(802)包括第一皮带驱动器(836,838)和第二皮带驱动器(836,838),并且所述第一皮带驱动器(836,838)独立于所述第二皮带驱动器(836,838)进行控制。10.根据权利要求1所述的牵引模块(114,240,242,244,660,662,664),其中所述驱动系统(802)包括一组辊(832,834)。11.根据权利要求1所述的牵引模块(114,240,242,244,660,662,664),还包括测量所述旋转框架(820)的角位置的位置编码器(866),其中所述机器人(108)的控制系统(150)使用所述旋转框架(820)的所述角位置使所述机器人(108)转向。12.根据权利要求1所述的牵引模块(114,240,242,244,660,662,664),其中所述机器人(108)是具有用于导航发电机、电动马达或涡轮机中的环形间隙(220,520)的可展开主体(112,246,610)的机器人爬行器(110,210,510,600),并且所述机器人(108)还包括至少一个连杆构件(230,828),所述至少一个连杆构件抵靠所述环形间隙(220,520)中的表面(234,236)定位所述牵引模块(114,240,242,244,660,662,664)。13.根据权利要求1所述的牵引模块(114,240,242,244,660,662,664),还包括定位在所述驱动系统(802)与旋转框架(820)之间以测量施加到所述驱动系统(802)的力的力传感器(870),其中力测量结果用于控制所述牵引模块(114,240,242,244,660,662,664)与所述驱动系统(802)推进所述机器人(108)所倚靠的表面(234,236)之间的表面(234,236)接触。14.一种包括根据权利要求1至13中任一项所述的牵引模块的机器人(108)系统,所述机器人系统包括:主体框架(612);以及控制所述主体框架(612)、所述驱动系统(802)和所述致动器(822)的控制系统(150)。15.一种操作机器人(108)的牵引模块(114,240,242,244,660,662,664)的方法,所述方法包括:提供牵引模块(114,240,242,244,660,662,664),所述牵引模块包括:主体框架(810);旋转框架(820),所述旋转框架可旋转地安装在所述外部框架(810)内;驱动系统(802),所述驱动系统操作地联接到旋转框架(820)并且被配置成驱动牵引驱
动部件(678,680,682)以推进所述机器人(108);和致动器(822),所述致动器操作地连接到所述旋转框架(820)以使所述旋转框架(820)可控地旋转;以及用所述致动器(822)使所述旋转框架(820)旋转,使得:在所述旋转框架(820)的旋转移动的第一部分期间,所述驱动系统(802)在第一位置与第二位置之间移动,所述第一位置相对于所述外部框架(810),在所述第二位置中,所述驱动系统(802)从所述外部框架(810)向外延伸至大于在所述第一位置中的程度,并且在所述旋转框架(820)的所述旋转移动的第二部分期间,所述驱动系统(802)移动到期望的取向以推进所述机器人(108)。
技术总结
本文公开了用于机器人系统(108)的牵引模块(114,240,244,660,662,664)以及使用该牵引模块的机器人系统。该牵引模块包括外部框架(666,668,670,810)和可旋转地安装在外部框架内的旋转框架(820)。驱动系统(802)操作地联接到旋转框架并且被配置成驱动牵引驱动部件(678,680,682)以推进机器人。致动器(822)操作地连接到旋转框架以使旋转框架可控地旋转。在旋转框架的旋转移动的第一部分期间,驱动系统在平坦模式位置与间隙模式位置之间移动,平坦模式位置相对于外部框架,在间隙模式位置中,驱动系统从外部框架向外延伸至大于在第一位置中的程度。在旋转框架的旋转移动的第二部分期间,驱动系统可被定位在期望的取向上以推进机器人。机器人。机器人。
技术研发人员:S
受保护的技术使用者:海博特公司
技术研发日:2020.08.14
技术公布日:2022/7/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。