利用车道和道路形状信息的偏向行驶系统和偏向行驶方法
1.相关申请的交叉引用
2.本技术要求于2020年12月29日提交的韩国专利申请no.10-2020-0186460的权益,其全部内容通过引用纳入本文。
技术领域
3.本发明涉及一种偏向行驶系统和一种偏向行驶方法,更具体地,涉及一种利用车道和道路形状信息并且能够考虑到本车位置识别准确度、附近车辆风险、驾驶风格、道路曲率和道路形状来控制车辆的偏向行驶的偏向行驶系统和偏向行驶方法。
背景技术:
4.车辆的自动驾驶需要基于行驶车道的自动加速和减速控制技术以及转向控制技术。在2019年11月1日公布的韩国专利申请公开no.10-2019-0123663中,一种行驶路径提供装置包括传感器110、转向装置120、输入装置130和控制电路140,一方面能够沿着行驶车道行驶,另一方面能够变换车道。
5.如韩国公开no.10-2019-0123663中所公开的,传感器110获取关于外部对象的信息,并且输入装置130接收来自车辆的驾驶员的车道变换命令。控制电路140基于从传感器110获取的信息和转向装置120的操作来执行控制,使得车辆在行驶车道中沿着偏向路径行驶。当车辆在行驶车道内沿偏向路径行驶的同时通过输入装置130接收到车道变换命令时,控制电路140进行控制,使得完成车道变换,然后车辆在目标车道内沿偏向路径行驶。
6.传统的偏向行驶装置以利用本车和附近车辆之间的安全距离作为参数来确定偏向值的方法控制车辆的行驶。因此,当在诸如正常驾驶、车道变换、车辆位于交叉路口的各种情况下确定偏向程度时,偏向值存在不连续点,使得车辆的偏向控制不自然。另外,在确定偏向值时输入了很多分支语句,从而增加了偏向值确定逻辑的复杂度,并且在偏向值中不能反映出本车位置识别准确度、附近车辆的风险和驾驶员的驾驶风格。
7.尤其是在基于车道侵占程度确定偏向值的情况下,即使在车道宽度狭窄的路段中预测出另一车辆接近,本车也不能提前做出反应。
技术实现要素:
8.因此,本发明涉及一种偏向行驶系统和偏向行驶方法,其基本上消除了由于相关技术的限制和缺点而导致的一个或多个问题。
9.本发明的一个目的是提供一种能够考虑到本车位置识别准确度、附近车辆风险、驾驶风格、道路曲率和道路形状来控制车辆的偏向行驶的偏向行驶系统。
10.本发明的另一目的是提供一种能够考虑到本车位置识别准确度、附近车辆风险、驾驶风格、道路曲率和道路形状来控制车辆的偏向行驶的偏向行驶方法。
11.为解决这些问题而设计的本发明的目的不限于上述目的,基于本发明的以下详细描述,本领域技术人员将清楚地理解其他未提及的目的。
12.为了实现这些目的和其他优点,根据本发明的目的,如本文所体现和广泛描述的,偏向行驶系统包括控制参数产生单元和控制器,所述控制参数产生单元配置为利用融合对象信息提取导致本车偏向的对象,所述融合对象信息为包括本车周围的车辆的位置和速度的地图信息,通过反映附近车辆的风险、位置识别准确度、本车驾驶员的驾驶风格、道路曲率或道路形状的至少一个产生所提取的对象的假想线,并且利用所述假想线产生控制参数;所述控制器配置为产生与从控制参数产生单元接收的控制参数相对应的车辆的控制值,以控制本车的偏向。
13.在本发明的另一方面中,一种偏向行驶方法包括:基于偏向区间提取偏向目标对象;通过在要偏向的参考点和所提取的偏向目标对象上反映预定的条件来提取假想线;将本车附近的偏向对象中满足预定标准的对象进行分组;针对每个分组的对象的集群计算偏向偏移量;产生偏向路径,所述偏向路径是反映了计算出的偏移量的车道线路上的路径;产生沿偏向路径移动的本车的速度分布;产生反映了偏向路径和速度分布的控制参数。
14.应当了解,本发明的前面的一般性描述和如下的详细描述均仅为示例性和解释性的,并且旨在提供对所要求保护的本发明的进一步的解释。
附图说明
15.包含以提供对本发明的进一步的理解并且被纳入并构成本技术的一部分的所附附图示出了本发明的实施方案,并且与说明书一起用于解释本发明的原理。在这些附图中:
16.图1示出了根据本发明的偏向行驶系统的实施方案;
17.图2示出了控制参数产生单元的示例;
18.图3示出了偏向目标对象提取模块的操作;
19.图4示出了对象假想线提取模块的操作,其中,图4的上部示出了关于直路的对象假想线提取方法,图4的下部示出了关于弯路的对象假想线提取方法;
20.图5示出了当本车的两侧都存在车辆时获取假想线和中心线的方法的示例;
21.图6示出了传统的仅在本车的一侧存在车辆时获取假想线和中心线的方法;
22.图7示出了根据本发明的仅在本车的一侧存在车辆时获取假想线和中心线的方法;
23.图8示出了当对象假想线提取模块设置假想线时反映风险的方法,其中,图8的上部示出了当存在危险性较小的车辆时轻微偏差,图8的下部示出了当存在危险车辆时较大偏差;
24.图9示出了当对象假想线提取模块设置假想线时反映位置识别准确度的方法,其中,图9的上部示出了轻微偏差,图9的下部示出了较大偏差;
25.图10示出了当对象假想线提取模块设置假想线时反映本车驾驶员的驾驶风格的方法,其中,图10的上部示出了学习的基于驾驶风格的虚拟车道宽度,图10的下部示出了反映威胁的具有驾驶风格的偏向行驶;
26.图11示出了当对象假想线提取模块确定车道宽度时反映本车驾驶员的驾驶风格的方法;
27.图12示出了当对象假想线提取模块设置假想线时反映道路曲率的方法;
28.图13示出了当对象假想线提取模块设置假想线时反映道路形状的方法,其中,图
13的上部示出了在汇合路段偏向行驶,图13的下部示出了在交叉路口偏向行驶;
29.图14示出了最终假想线确定方法的示例,其中,wi表示第i个元素的权重,oi表示第i个偏移量;
30.图15示出了由偏向对象聚类模块执行的聚类的实施方案;
31.图16示出了由偏向对象聚类模块执行的聚类的另一实施方案;
32.图17示出了由偏向对象聚类模块执行的聚类的又一实施方案;
33.图18示出了由偏向路径产生模块产生的偏向路径;
34.图19示出了根据本发明的偏向行驶方法的实施方案;
35.图20示出了在末端车道行驶时根据对侧车道是否存在车辆而进行偏向的示例;以及
36.图21示出了在危险车辆和正常车辆混合的情况下本发明的应用示例。
具体实施方式
37.应当理解,本文所使用的术语“车辆”或“车辆的”或其它类似术语一般包括机动车辆,例如包括运动型多用途车辆(suv)、大客车、大货车、各种商用车辆的乘用车辆,包括各种舟艇、船舶的船只,航空器等,并且包括混合动力车辆、电动车辆、混合动力电动车辆、氢动力车辆以及其它替代性燃料车辆(例如,源于非化石能源的燃料)。正如本文所提到的,混合动力车辆是具有两种或更多动力源的车辆,例如汽油动力和电力动力两者的车辆。
38.本文所使用的术语仅用于描述具体的实施方案的目的,并不旨在限制本发明。除非上下文另有明确说明,否则本文所使用的单数形式“一”、“一个”和“该”也旨在包括复数形式。还将进一步理解,当在本说明书中使用术语“包括”和/或“包含”时,说明存在所述的特征、数值、步骤、操作、元件和/或组件,但是不排除存在或添加一种或多种其它的特征、数值、步骤、操作、元件、组件和/或其组合。正如本文所使用的,术语“和/或”包括一种或多种相关列举项目的任何和所有组合。在整个说明书中,除非做出明确的相反描述,词语“包括”和诸如“包括了”或“包含”的变体,将被理解为暗示包括所述元件,但不排除任何其它元件。此外,在说明书中描述的术语“单元”、“器”、“部”和“模块”表示用于处理至少一个功能和操作的单元,并且可以由硬件组件或者软件组件以及其组合来实现。
39.此外,本发明的控制逻辑可以实施为计算机可读介质上的非易失性计算机可读介质,其包含由处理器、控制器等执行的可执行程序指令。计算机可读介质的示例包括但不限于rom、ram、光碟(cd)-rom、磁带、软盘、闪盘驱动器、智能卡和光学数据存储设备。计算机可读介质还可以分布在网络连接的计算机系统上,使得计算机可读介质例如通过远程信息处理服务器或控制器局域网(controller area network,can)以分布方式存储和执行。
40.为了充分理解本发明、本发明的操作优点以及通过本发明的实施所达到的目的,必须参考描述本发明的示例性实施方案的所附附图以及在所附附图中阐述的内容。
41.在下文中,将参考所附附图对本发明的实施方案进行详细描述。在各个附图中,相同的附图标记表示相同的构件。
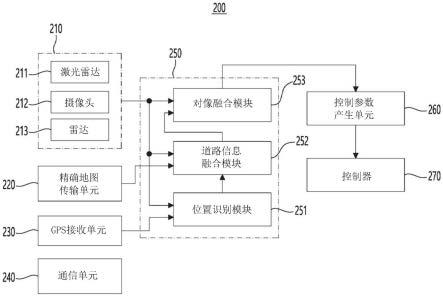
42.图1示出了根据本发明的偏向行驶系统的实施方案。
43.参考图1,根据本发明的偏向行驶系统(以下称为偏向行驶系统)200包括:识别传感器单元210、精确地图传输单元220、gps接收单元230、通信单元240、偏向对象信息产生单
元250、控制参数产生单元260、控制器270。
44.识别传感器单元210包括激光雷达211、摄像头212和雷达213,并且收集行驶道路的信息、行驶道路的周边信息和关于附近车辆的信息,以产生识别信息。精确地图传输单元220提供配备有偏向行驶系统200的车辆周围的精确地图。
45.gps接收单元230从gps卫星(未示出)接收信号并利用接收到的信号计算本车(即,配备有偏向行驶系统200的车辆)的当前位置。通信单元240配置为在偏向行驶系统200中以及在偏向行驶系统200与外部之间发送和接收信息。
46.偏向对象信息产生单元250包括位置识别模块251、道路信息融合模块252和对象融合模块253。
47.位置识别模块251将从识别传感器单元210接收的识别信息、从gps接收单元230接收的本车的当前位置信息以及从精确地图传输单元220接收的车辆周围的精确地图相互比较,以产生本车的当前精确位置信息和位置识别可靠性信息。道路信息融合模块252利用从位置识别模块251接收到的本车的当前精确位置信息和从精确地图传输单元220接收到的车辆周围的精确地图,产生本车周围的精确地图。对象融合模块253利用从道路信息融合模块252接收到的本车周围的精确地图和识别信息来产生融合对象信息。融合对象信息是地图信息。具体地,融合对象信息不是简单的地图信息,而是包括对象(即,除了本车之外的附近车辆)的位置和速度的地图信息。
48.控制参数产生单元260利用从偏向对象信息产生单元250接收的融合对象信息产生要提供给控制器270的控制参数。下面将描述控制参数产生单元260的结构和功能。
49.控制器270产生与从控制参数产生单元260接收的控制参数相对应的车辆的控制值以控制车辆的偏向。
50.图2示出了控制参数产生单元的示例。
51.参考图2,控制参数产生单元260包括:偏向目标对象提取模块261、对象假想线提取模块262、偏向对象聚类模块263、偏向路径产生模块264、速度分布产生模块265、行驶路径信息产生模块266、控制参数产生模块267。
52.首先,将简单介绍与各个模块的输入和输出相关的内容,各个模块的详细功能如下所述。
53.偏向目标对象提取模块261从包括在融合对象信息(其从偏向对象信息产生单元250接收到)中的多个对象中提取导致本车偏向的对象或导致本车偏向的对象的列表。导致本车偏向的对象表示在预定的偏向区间d内接近的车辆。
54.对象假想线提取模块262针对从偏向目标对象提取模块261接收到的导致本车偏向的对象提取偏向目标对象的假想线,并且利用所提取的偏向目标对象的假想线提取本车的中心线。这里,假想线是以目标对象的最外点与本车之间的最近点为基准的与本车车道平行的假想直线(或曲线),并且在偏向时作为基准线使用。当利用假想线提取中心线时,对在本车的两侧都存在对象的情况和仅在本车的一侧存在对象的情况彼此进行区分,并且在各个情况中反映风险、位置识别准确度、本车驾驶员的驾驶风格、道路曲率和道路形状。
55.偏向对象聚类模块263基于从对象假想线提取模块262接收到的偏向目标对象的假想线和预定标准来产生对偏向目标对象进行分组的偏向集群信息。偏向集群信息包括集群的数量和每个集群的信息,并且用于防止产生不自然的偏向路径。这里,所述标准包括基
于车辆之间的距离的标准、基于其他车辆是否曲折行进(zigzag)的标准以及基于本车的预期横向速度的标准。
56.偏向路径产生模块264利用从偏向对象聚类模块263接收的偏向集群信息来产生偏向路径,所述偏向路径是一组最终的偏向值。这里,偏向路径是指在集群内将在最靠近本车车道的左侧车道的假想线和最靠近本车车道的右侧车道的假想线之间的中心线与车道线路(link)相互连接的线。
57.速度分布产生模块265产生包括从偏向路径产生模块264接收到的偏向路径以及与道路交通情况相匹配的本车的速度信息的速度分布(profile)信息。
58.行驶路径信息产生模块266产生包括从偏向路径产生模块264接收到的偏向路径以及从速度分布产生模块265接收到的速度分布信息的行驶路径信息。
59.控制参数产生模块267基于由行驶路径信息产生模块266产生的行驶路径信息产生驾驶本车所需的控制参数。
60.图3示出了偏向目标对象提取模块的操作。
61.参考图3,可以看出,偏向目标对象提取模块261包括位于本车周围的总共四个对象中的包含在偏向区间d(m)(m为米)内的两个对象(对象2和对象3)作为偏向目标对象。偏向区间d根据车道宽度和车道特性可变地设置。
62.如上所述,在由偏向目标对象提取模块261接收的融合对象信息中,与本车相邻的车辆(对象1至对象4)的位置、速度和地图信息融合。正常车道的宽度约为3.5m。例如,考虑到轻微的偏向,总宽度大约为2m的车辆至车道线的距离大约为50cm。在车辆在30cm内接近本车车道线的情况下,该车辆会威胁到对侧车道。因此,可以将本车车道线外30cm以内的区间和本车车道线内不属于经过区间(inpass)的区间相加,并且设置为偏向区间d。
63.图4示出了对象假想线提取模块的操作。
64.参考图4,可以看出,对象假想线提取模块262从弯路和直路提取从偏向目标对象提取模块261接收到的导致本车偏向的偏向目标对象(对象1和对象2)的假想线。如前所述,偏向目标对象是使本车不得不偏向的目标车辆或使本车不得不偏向的目标车辆的列表。
65.在构成识别传感器单元210的各种传感器的输出不准确从而使车辆的轮廓线抖动的情况下,利用通过从车辆的后保险杠的中心平行移动预定的车辆宽度而获得的假想线的实施方案也是可能的。
66.在本车两侧的车道中都存在对象(以下称为车辆)的情况下,本车优选沿着两个车辆之间的中心行驶。在这种情况下,可以基于两个车辆的最外轮廓线计算中心线。在仅在本车一侧的车道中存在车辆的情况下,可以假设在与本车间隔相同距离的状态下,在存在的车辆的相反侧也存在相同的车辆,从而计算中心线。
67.将首先描述当本车两侧的车道中都存在车辆时获得两条假想线和两条假想线之间的中心线的方法,然后将描述当仅在本车一侧的车道中存在车辆时获得两条假想线和两条假想线之间的中心线的方法。
68.图5示出了当本车的两侧都存在车辆时获取假想线和中心线的方法的示例。
69.参考图5,可以清楚地看出,当左侧车辆(对象1)和右侧车辆(对象2)各自沿着其中心线行驶时,车道线路和中心线相互重合。然而,在左侧车辆(对象1)和右侧车辆(对象2)都朝向本车车道偏向的情况下,可以看出,根据偏向程度,成为校正的车道线路的假想中心
线,即,两个车辆(对象1和对象2)之间的中心点基于两个车辆的车道宽度确定为从车道线路向左偏向预定距离的点。谨慎考虑在车道宽度较小的区间中的偏向车辆(对象2),中心线朝向相反侧(即,向左)偏向。
70.可以忽略在相反方向上的有效偏向。即,参考图5,基于本车的车道,即使左侧车道的宽度大于右侧车道的宽度,本车也不会无限期地向对应的车道移动,仅反映必要程度的偏向。
71.在左侧车辆(对象1)的假想线的位置(p
x0
,py)、中心线的位置(p
x
,py)和右侧车辆(对象2)的假想线的位置(p
x1
,py),中心线的x坐标(p
x
)可以由数学表达式1表示。
72.[数学表达式1]
[0073][0074]
这里,l1表示本车车道的车道线路与每个车道线之间的距离,l0表示本车的左侧车道线与左侧车辆的中心线之间的距离,l2表示本车的右侧车道线与右侧车辆的中心线之间的距离。
[0075]
d0为左侧车辆(对象1)沿中心线行驶时左侧车道的中心线与左侧车辆的右侧假想线之间的距离,s0为假设沿左侧车道的中心线行驶的车辆向本车的车道移动的距离。d0可以是左侧车辆(对象1)的宽度的一半。
[0076]
d1和s1用于位于右侧车道的右侧车辆(对象2),适用于左侧车辆(对象1)的概念同样适用于右侧车辆。
[0077]
图6示出了传统的仅在本车的一侧存在车辆时获取假想线和中心线的方法。
[0078]
参考图6,在传统的技术中,当仅在本车的右侧存在车辆(对象2)时,假设车辆(对象1)沿着本车的左侧车道的中心线行驶,本车的左侧假想线设置为从左侧车道的中心线(或车道线路)向右移动假想的对象1的宽度的点。将如上所述进行设置的左侧假想线与如图5所示进行设置的右侧假想线之间的中心定义为本车的校正的车道线路,如数学表达式2所示。
[0079]
[数学表达式2]
[0080][0081]
然而,在由数学表达式2确定的左侧车道的假想线中,仅反映了左侧车道内不存在车辆的事实。
[0082]
在本发明中,当一侧车道内没有车辆时,考虑到没有车辆的车道的曲率和形状、位于另一侧的车辆(对象2)的风险、本车位置识别准确度和本车驾驶员的驾驶风格,改变没有车辆的车道的车道宽度,从而考虑到左侧车辆(对象1)实际不存在而使得与实际存在的右侧车辆(对象2)的碰撞事故最小化。
[0083]
图7示出了根据本发明的仅在本车的一侧存在车辆时获取假想线和中心线的方法。
[0084]
参考图7,当左侧车道内不存在车辆时,仅考虑对右侧车辆发生干扰的情况的数量就足够了。因此,任意增加左侧车道的车道宽度,以使对右侧车辆的干扰最小化。即,由于没有车辆在左侧车道内行驶,因此与传统方法相比,本车的中心线(车道线路)进一步向左侧车道移动,以便在本车与右侧车辆之间保持足够的距离。
[0085]
由于没有车辆的车道的车道宽度是任意调整的,所以车道的中心线的位置与车道宽度的变化成比例地变化。由于左侧车道的假想线的位置发生了变化,中心线的位置也发生了变化,因此也会影响车辆的偏向值。
[0086]
考虑了车道宽度改变的左侧车道的本车的新的车道线路可以由数学表达式3表示。
[0087]
[数学表达式3]
[0088][0089]
参考数学表达式3,影响假想线的位置的参数为车道宽度l0'、假想的车辆的宽度d0、假想的车辆的偏移量l
2-l0',由此可知,如果排除假想车辆的概念,则可以改变车道宽度。
[0090]
在上面的描述中,为了改变假想线的位置而对车道宽度进行改变。然而,改变假想线的方法不限于此。具体地,可以通过利用假想车辆的概念并改变假想车辆的宽度和偏移量来改变假想线的位置。
[0091]
例如,改变没有车辆的车道的宽度时考虑的因素可以包括风险、位置识别准确度、本车驾驶员的驾驶风格、道路曲率和道路形状。
[0092]
术语“风险”是指基于车辆(即,右侧车辆)的类型和尺寸的事故风险。当在更接近危险车辆的状态下行驶时,驾驶员通常可以受到更大的威胁。因此,优选在产生没有车辆的车道的假想线时反映风险。
[0093]
图8示出了当对象假想线提取模块设置假想线时反映风险的方法。
[0094]
参考图8,可以看出,对象假想线提取模块262可以在产生对象的假想线时反映风险,并且左侧对象的假想线的位置根据右侧车辆的类型和尺寸而改变。附近车辆对本车驾驶员的威胁感根据附近车辆的类型而改变。例如,当附近车辆是大客车、工程车辆、卡车或双轮车辆时,与附近车辆是小型车辆或具有相同尺寸的小客车时相比,本车驾驶员受到的威胁要大得多,驾驶时也更加小心。
[0095]
假设并排设置以在相同方向上延伸的多个车道具有相同的宽度,并且基于本车,
在左侧车道内不存在车辆而在右侧车道内存在车辆。在这种情况下,在设置本车的行驶路径时,根据右侧车道内的车辆的类型和尺寸任意增加左侧车道的宽度,使得本车的行驶路径(即,本车的车道线路)进一步朝向左侧车道偏向,从而防止本车与右侧车辆之间的碰撞事故。
[0096]
参考图8的上部,当右侧车道内的车辆(对象2-1)是诸如小客车的危险性较小的车辆时,左侧车道的宽度设置为d1。参考图8的下部,当右侧车道内的车辆(对象2-2)是诸如载货卡车的危险车辆时,左侧车道的宽度设置为d2。这里,d1《d2。
[0097]
参考图8,可以看出,当存在危险性较小的车辆时,车道的宽度呈现轻微偏差,而当存在危险车辆时,车道的宽度呈现较大偏差。
[0098]
当存在这样的危险车辆时设置较大偏差的原因是可以确保针对自动驾驶控制故障的冗余以及稳定的驾驶和乘坐舒适性。
[0099]
图9示出了当对象假想线提取模块设置假想线时反映位置识别准确度的方法。
[0100]
参考图9,对象假想线提取模块262可以在产生对象的假想线时反映位置识别准确度。当位置识别不准确时,增加与相邻车道内的车辆的距离,以确保针对自动驾驶判断逻辑的错误判断的冗余。当两侧车道内都存在车辆时,两侧车道的车道宽度均不改变,因此本车的驾驶没有问题。当仅在右侧车道内存在车辆并且本车或右侧车辆的位置识别不准确时,如图9所示,尽可能宽地改变左侧车道的宽度,从而向左侧车道移动最终的假想线。即,本车或右侧车辆的位置识别的不准确程度与改变的车道宽度成正比。
[0101]
与图8中的方法相同,相比于较大偏向时的d2,轻微偏向时的d1更窄(d1《d2)。
[0102]
图10示出了当对象假想线提取模块设置假想线时反映本车驾驶员的驾驶风格的方法。
[0103]
参考图10,对象假想线提取模块262可以在产生对象的假想线时反映本车驾驶员的驾驶风格,并且学习道路现象和对象信息、驾驶员信息、以及手动驾驶时的最终偏向值。在学习完成后,可以将在与学习情况相似的情况下推导出学习的最终偏向值的车道宽度的变化设置为基本偏移量,并且可以加上额外计算出的偏移量。
[0104]
例如,当与右侧车道内的小客车平行行驶时,在相同情况下使左侧车道的宽度改变20cm的偏移量基本上可以适用于以10cm的偏向值(d1)进行驾驶的驾驶员。
[0105]
如果在相同情况下通过反映位置识别准确度,车道宽度进一步改变10cm,则车道的宽度总共改变了30cm,因此设置15cm(d2)的偏向值。
[0106]
图11示出了当对象假想线提取模块确定车道宽度时反映本车驾驶员的驾驶风格的方法。
[0107]
参考图11,反映本车驾驶员的驾驶风格的方法(1100)包括:确定本车当前是否以自动驾驶模式行驶的步骤(1110);在确定出本车没有以自动驾驶模式行驶(1110的“否”)之后,学习并存储每个驾驶员的驾驶风格的步骤(1120至1140);以及在确定出本车以自动驾驶模式行驶(1110的“是”)之后,基于学习并存储每个驾驶员的驾驶风格的步骤(1120至1140)中的执行结果和地图形状信息执行偏向行驶的步骤(1150至1180)。
[0108]
学习并存储每个驾驶员的驾驶风格的步骤(1120至1140)包括:存储本车当前行驶的车道附近的车道的车道宽度的变化的步骤(1120);学习每个对象的车道宽度的步骤(1130);以及存储每个驾驶员的学习结果的步骤(1140)。
[0109]
执行偏向行驶的步骤(1150至1180)包括:确定是否存在先前的学习结果的步骤(1150);在确定出存在先前的学习结果(1150的“是”)之后,将在学习并存储每个驾驶员的驾驶风格的步骤(1120至1140)中存储的每个驾驶员的学习结果与当前情况进行比较,以确定车道宽度的步骤(1160);在确定出不存在先前的学习结果(1150的“否”)之后,利用地图形状信息确定车道宽度的步骤(1170);以及利用在确定两个车道宽度的步骤(1160和1170)中确定出的车道宽度执行偏向行驶的步骤(1180)。
[0110]
参考图11,根据本发明的偏向行驶系统200能够在手动模式而不是自动驾驶模式下基于每个对象的信息和附近道路形状通过最终偏向值来学习驾驶员的驾驶习惯,并且在自动驾驶模式下存在先前学习的模型时,能够将最终偏向值输出为学习结果,以用于利用附近道路形状和对象信息作为输入进行偏向。
[0111]
此外,当在自动驾驶模式(初始化状态或驾驶员切换状态)下不存在先前学习的模型时,可以在没有偏移量的情况下执行基于地图形状信息的车道宽度的确定。当在自动驾驶模式下存在先前学习的模型时,基于学习结果确定车道宽度,从而在假想线的位置存在偏移量,并且基于地图形状信息,通过反映偏移量确定最终车道宽度和假想线,从而执行偏向行驶。
[0112]
图12示出了当对象假想线提取模块设置假想线时反映道路曲率的方法。
[0113]
参考图12,对象假想线提取模块262可以在产生对象的假想线时反映道路曲率。在确定出道路弯曲时,在朝向向心点而不是本车的车道中心的方向上添加偏向,从而提高驾驶稳定性。
[0114]
偏向值设置为与道路曲率成比例,从而随着道路曲率的增大通过更大的偏向提供离心力的控制余量。
[0115]
例如,如图12所示,当曲率具有正值(即,本车左转)时,具有正值的偏移量(即,左偏移量)添加至假想线。当曲率具有负值时(即,本车右转)时,具有负值的偏移量(即,右偏移量)添加至假想线。
[0116]
图13示出了当对象假想线提取模块设置假想线时反映道路形状的方法。
[0117]
参考图13,对象假想线提取模块262可以在产生对象的假想线时反映道路形状。这里,道路形状可以是交叉路口或汇合路段,并且对于在这样的特定路段中沿朝向本车车道的方向进入的车辆(对象2)反映附加偏向。
[0118]
通常,进入车辆(对象2)基于入口道路的道路形状行驶或以类似于道路形状的形式进入。因此,入口道路的道路形状反映在偏向值中。为了反映道路形状,当改变车道宽度时,入口车道的车道形状反映在相反车道的车道宽度中,由此可以容易地产生反映了这一点的偏向路径。
[0119]
图13的上部的最左侧的直线反映了汇合路段的入口道路的形状,图13的下部的最左侧曲线反映了交叉路口处的入口道路的形状。
[0120]
图14示出了最终假想线确定方法的示例。
[0121]
参考图14,可以看出可以组合(1460)通过反映风险(1410)、位置识别准确度(1420)、驾驶员的驾驶风格(1430)、道路曲率(1440)和道路形状(1450)及其权重而计算出的偏移量,并且通过反映风险(1410)、位置识别准确度(1420)、驾驶员的驾驶风格(1430)、道路曲率(1440)和道路形状(1450)来确定最终假想线。
[0122]
可以通过分配权重以与每个元素的重要性成比例并且执行加权求和计算来确定假想线的偏移量。通过参数调整以实验的方式确定权重的方法或分配补偿函数并且通过重复反馈回路循环确定使补偿函数最大化的参数的方法可以应用为权重确定方法。
[0123]
在图14中,五个计算结果组合在一起。然而,可以实施反映风险、位置识别准确度、驾驶员的驾驶风格、道路曲率和道路形状的至少一个的实施方案。
[0124]
图15示出了由偏向对象聚类模块执行的聚类的实施方案。
[0125]
参考图15,偏向对象聚类模块263将多个对象分组为一个对象,以便在本车计算每个对象的偏向值时使不自然的偏向路径的产生最小化。车辆之间的距离用作分组的标准。
[0126]
即,如下所述,当偏向对象之间的距离小于临界距离时执行分组。
[0127]
–
当在临界距离t(m)内存在第n个偏向对象和第(n 1)个偏向对象时,将这两个对象分组为单个对象。
[0128]
–
当在临界距离t(m)内存在第(n 1)个偏向对象和第(n 2)个偏向对象时,将第n个、第(n 1)个和第(n 2)个对象分组为单个对象。
[0129]
–
在上述方法中,可以重复进行聚类,直到达到总的n_max个,可以将n_max扩展为偏向对象的总数。
[0130]
–
当在上述情况下确定出最终偏向路径时,最靠近本车车道的左侧车道的假想线与最靠近本车车道的右侧车道的假想线之间的中心线在集群中可以成为分量。
[0131]
图16示出了由偏向对象聚类模块执行的聚类的另一实施方案。
[0132]
参考图16,当本车计算每个对象的偏向值时,偏向对象聚类模块263将多个对象分组为一个对象。另一车辆是否曲折行进用作分组的另一标准。
[0133]
即,如下所述,在存在多辆曲折行进行驶的其他车辆(对象)的情况下,将这些车辆分组为一个。
[0134]
–
基于本车车道,当在左侧车道和右侧车道内分别存在第n个偏向对象和第(n 1)个偏向对象时,这两个对象分组为单个集群。
[0135]
–
基于本车车道,当在左侧车道和右侧车道内分别存在第(n 1)个偏向对象和第(n 2)个偏向对象时,将第n个、第(n 1)个和第(n 2)个对象分组为单个集群。
[0136]
–
在上述方法中,可以重复进行聚类,直到达到总的n_max个,可以将n_max扩展为偏向对象的总数。
[0137]
–
当在上述情况下确定出最终偏向路径时,最靠近本车车道的左侧车道的假想线与最靠近本车车道的右侧车道的假想线之间的中心线在集群中可以成为分量。
[0138]
图17示出了由偏向对象聚类模块执行的聚类的又一实施方案。
[0139]
参考图17,当本车计算每个对象的偏向值时,偏向对象聚类模块263将多个对象分组为一个对象。本车的预期横向速度用作分组的进一步标准。
[0140]
即,如下所述,当预测本车的预期横向速度高于临界速度时,将与该临界速度对应的多个其他车辆(对象)分组为一个。
[0141]
–
当本车的预期横向速度高于第n个偏向对象和第(n 1)个偏向对象中的每一个的临界速度时,将这两个对象分组为单个集群。
[0142]
–
当本车的预期横向速度高于第(n 1)个偏向对象和第(n 2)个偏向对象中的每一个的临界速度时,将第n个、第(n 1)个和第(n 2)个对象分组为单个集群。
[0143]
–
在上述方法中,可以重复进行聚类,直到达到总的n_max个,可以将n_max扩展为偏向对象的总数。
[0144]
–
当在上述情况下确定出最终偏向路径时,最靠近本车车道的左侧车道的假想线与最靠近本车车道的右侧车道的假想线之间的中心线在集群中可以成为分量。
[0145]
作为偏向聚类,可以使用三种方法中的一种,或者可以以互补组合的状态使用两种以上方法。偏向对象聚类模块的输出可以是集群的总数或每个集群的信息,集群信息的分量可以是集群中偏向对象的数量、集群中偏向对象的信息(速度、位置、地图信息等)和假想线信息。
[0146]
图18示出了由偏向路径产生模块产生的偏向路径。
[0147]
参考图18,可以看出,由偏向路径产生模块264产生的偏向路径可以是将集群中的最靠近本车车道的左侧车道的假想线和最靠近本车车道的右侧车道的假想线之间的中心线与车道线路相互平滑地连接的曲线。
[0148]
连接假想线之间的中心线和车道线路的方法不限于特定的方法,例如可以使用以下方法。
[0149]
1.控制构成假想线之间的中心线的统一点和车道线路的统一点,
[0150]
由点构成的贝塞尔曲线。
[0151]
2.控制构成假想线之间的中心线的统一点和车道线路的统一点,
[0152]
由点构成的b样条曲线。
[0153]
3.控制构成假想线之间的中心线的统一点和车道线路的统一点,
[0154]
由点构成的非均匀有理b样条(nurbs)。
[0155]
4.控制构成假想线之间的中心线的统一点和车道线路的统一点,
[0156]
由点构成的三次样条。
[0157]
图19示出了根据本发明的偏向行驶方法的实施方案。
[0158]
参考图19,根据本发明的偏向行驶方法(1900)包括:初始化步骤(1910);偏向目标对象提取步骤(1920);提取偏向目标对象的假想线的步骤(1930);偏向目标聚类步骤(1940);最终偏向偏移量计算步骤(1950);偏向路径产生步骤(1960);速度分布产生步骤(1970)和控制参数产生步骤(1980)。
[0159]
图19所示的偏向行驶方法(1900)利用图1和图2所示的偏向行驶系统200来执行,因此,将仅简要描述每个步骤的操作。
[0160]
在初始化步骤(1910)中,对图2所示的偏向行驶系统200进行初始化。
[0161]
在偏向目标对象提取步骤(1920)中,基于偏向区间提取偏向目标对象。
[0162]
在提取偏向目标对象的假想线的步骤(1930)中,提取参考点和要偏向的假想线。
[0163]
在偏向目标聚类步骤(1940)中,对在本车附近的偏向对象中满足特定标准的对象进行分组。
[0164]
在最终偏向偏移量计算步骤(1950)中,针对每个分组的集群最终确定出偏向偏移量。
[0165]
在偏向路径产生步骤(1960)中,产生反映了偏移量的车道线路的路径(即,成为行驶指引的偏向路径)。
[0166]
在速度分布产生步骤(1970)中,产生沿着偏向路径移动的本车的速度分布。
[0167]
在控制参数产生步骤(1980)中,产生反映了偏向路径和速度分布的控制参数。
[0168]
图20示出了在末端车道行驶时根据对侧车道是否存在车辆进行偏向的示例。
[0169]
参考图20,如果本车在末端车道行驶期间以靠近灌木丛或护栏的状态行驶,驾驶员可能受到威胁,从而可能执行偏向行驶。在相反车道内不存在车辆的情况下,可以与护栏或灌木丛保持足够的距离。然而,在相邻车道有车辆行驶的情况下,本车可以沿着车道的中心行驶,或者本车可以以相对于该车辆偏向的状态行驶。在这种情况下,诸如灌木丛和护栏的静态对象的风险和相邻车道内的车辆的风险可以进行不同地分配,这可以反映在偏向值中。
[0170]
例如,车道宽度的变化可以与对侧车辆的风险成正比。因此,如图20的上部所示,当存在危险车辆时,会发生比灌木丛更大的风险,因此最终假想线的位置可以偏向与该车辆相反的一侧。当不存在车辆时,如图20的下部所示,灌木丛/护栏的风险高于没有车辆的车道,因此最终假想线的位置可以偏向与灌木丛/护栏相反的一侧。
[0171]
图21示出了在危险车辆和正常车辆混合的情况下本发明的应用示例。
[0172]
参考图21,当不同类型的车辆在正常车道行驶期间在两侧车道行驶时,存在以与更危险的车辆间隔足够距离的状态进行偏向行驶的趋势。在这种情况下,危险车辆的风险和相对安全的车辆的风险可以不同地分配,这可以反映在偏向值中。
[0173]
例如,车道宽度的变化可以与对侧车辆的风险成正比。因此,当存在危险车辆时,危险车辆比正常车辆具有更高的风险,因此最终假想线的位置可以偏向与危险车辆相反的一侧,即,偏向较不危险的车辆。由于危险车辆(卡车、工程车辆、大客车等)的风险高于正常车辆的风险,最终假想线的位置可以偏向与危险车辆相反的一侧。
[0174]
上述图11、图14和图19所示的本发明可以实现为存储在计算机可读记录介质中的计算机可读程序。计算机可读介质可以是以计算机可读方式存储数据的任何类型的记录设备。例如,计算机可读介质可以包括硬盘驱动器(hdd)、固态磁盘(ssd)、硅磁盘驱动器(sdd)、只读存储器(rom)、随机存取存储器(ram)、只读光盘驱动器(cd-rom)、磁带、软盘和光学数据存储装置。
[0175]
通过以上描述显而易见的是,根据本发明的偏向行驶系统和偏向行驶方法的优点在于:在复杂的方面,可以仅获得在与本车车道相邻的车道内行驶的车辆的偏向值;即使不是直路而是在弯曲的道路上行驶,也可以利用相同的方法获得具有可靠性的偏向值;由于本车在考虑到车辆类型、位置识别准确度、驾驶员的驾驶风格等的实际车辆的轮廓线之间通过,因此可以确保驾驶稳定性和乘坐舒适性;可以反映道路形状,并且可以将道路形状应用于车道宽度发生变化的路段(例如,汇合车道、交叉路口或者收费站)。
[0176]
需要说明的是,实施方案的效果不限于上述效果,本领域技术人员通过以上描述可以清楚地理解其他未提及的效果。
[0177]
虽然已经参考附图描述了本发明的技术思想,但只是示例性地描述本发明的优选实施方案,而不是限制本发明。此外,本发明所属领域的普通技术人员将理解,在不脱离本发明的技术思想的范畴的情况下,可以进行各种修改和改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
