1.本实用新型涉及外骨骼辅助康复机器人的控制领域,尤其涉及一种基于触控面板的外骨骼机器人手控器。
背景技术:
2.外骨骼机器人是通过程序控制机械臂等设备辅助人继续运动,其机械臂等设备起到仿生外骨骼的作用,外骨骼机器人的控制程序运行于内部的计算机中,操作人员需要操作外骨骼手控器发出信号与内部计算机进行通讯,进而控制外骨骼机器人执行相应动作。
3.目前,外骨骼机器人手控器大多采用微动开关加上按键帽制成,当操作人员按下按键时,该微动开关输出电平发生变化,机器人内部的计算机检测到控制器某一按钮被按下,进而执行相应的程序段控制外骨骼机器人执行相应动作。而现有技术具有以下缺点:
4.(1)为了不相互干涉,每个按键都需要占据一定面积,为了便于手持,外骨骼手控器不会设计的很大,这就限制了能够放置的按键的数量。
5.(2)按钮按下需要一定的力度,多次按下会导致手指不舒适。
6.(3)虽然多个按钮能够共用一条供电线或接地线,但是每个按钮都需要一条信号线,如果按钮数量为n个,那么最少需要n 1条电线。这样一方面提高了电线的成本,并且由于普遍将信号线的一端焊接到电路板上,出现故障时往往比较难更换信号线。
7.(4)手控器通常由电路板,微动开关,按钮及其弹簧,外壳,电线等部分组成,其中按钮及弹簧等结构件质量相对较大,如果需要多个按钮的话可能会导致手控器整体的质量较大,不宜手持。为此,综上所述,本实用新型为提升手控器的使用便捷性而生。
技术实现要素:
8.本实用新型旨在提供一种相对于传统的按键式手控器更加便捷使用的触控式手控器。为此,本技术提供了一种基于触控面板的外骨骼机器人手控器,其特征在于,包括:
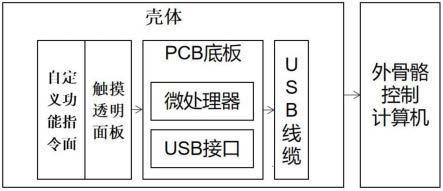
9.一种基于触控面板的外骨骼机器人手控器,其特征在于,包括壳体、控制主板、触控透明面板和自定义功能指令面;所述控制主板设于所述壳体内并具有外接控制模块,所述触控透明面板设于所述壳体上,所述触控透明面板与所述控制主板通过电容式触摸屏技术控制连接,所述自定义功能指令面位于所述触控透明面板触摸面的另一面,并能透过所述触控透明面板可视,所述自定义功能指令面具有不同功能指令区,所述不同功能指令区对应所述触控透明面板的不同位置。
10.采取以上技术方案的有益效果为:
11.自定义功能指令面能够根据外骨骼控制指令的需要灵活印制按钮图案(比如:走、坐、站、停等),该按钮图案即为功能指令区,操作人员触摸到触控透明面板对应按钮区域的位置时,触控透明面板将采集到的触控坐标传递给控制主板,控制主板内预设有接收到不同坐标位置而对应的控制程序,接收到相应信号后根据对应的控制程序控制外骨骼机器人执行相应动作。自定义功能指令面表面印刷的按钮大小与颜色能够灵活调整,这样就能在
有限的体积下放下更多的按钮,触控透明面板通过触控式触摸屏技术,手指轻微触碰即可检测到触碰点的位置数据,手指操作反馈力度小,操作手感等同于操作手机触摸屏的手感,较为舒适。
12.进一步的,所述控制主板包括pcb底板、微处理器和外接控制模块;所述微处理器和所述外接控制模块设于所述pcb底板上。
13.进一步的,所述自定义功能指令面包括一基础面和绘制于所述基础面上的功能指令区。
14.进一步的,所述基础面为结构面,所述结构面包括纸面、塑料面或金属材质薄面。
15.进一步的,所述基础面被设置为所述壳体的表面。
16.进一步的,所述触控透明面板包括电容透明面板和控制驱动芯片,所述控制驱动芯片采集所述电容透明面板的触控位置并通信反馈于所述微处理器。
17.进一步的,所述触控透明面板包括电阻透明面板和控制驱动芯片,所述控制驱动芯片采集所述电阻透明面板的触控位置并通信反馈于所述微处理器。
18.进一步的,所述微处理器内预设有外骨骼机器人行走控制程序,所述外骨骼机器人行走控制程序被所述功能指令区所对应的所述触控透明面板上触控位置触发。
19.进一步的,所述自定义功能指令面被印刷于所述触控透明面板触摸面的另一面。
20.进一步的,所述外接控制模块为与外骨骼控制计算机通信的通信模块;该通信模块为以下所列通信协议中所用模块的一种:usb通信模块、rs-232标准接口模块、rs-485通信模块、ethernet以太网模块、蓝牙模块、wi-fi通信模块、uart通信模块、i ic通信模块、spi是串行外设接口模块、can控制器域网模块、li n通信模块或ethercat通信模块。
附图说明
21.图1表达了本实用新型的结构模块示意图。
22.图2表达了本实用新型的结构位置示意图。
23.其中:
24.壳体1触控透明面板2自定义功能指令面3pcb底板4微处理器5外接控制模块6线缆7外骨骼控制计算机8
具体实施方式
25.以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本实用新型的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本实用新型的精神和范围的其他技术方案。
26.本领域技术人员应理解的是,在本实用新型的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本实用新型的限制。
27.请参阅图1~图2,本实用新型提供了一种基于触控面板的外骨骼机器人手控器,一种基于触控面板的外骨骼机器人手控器,包括壳体、控制主板、触控透明面板2和自定义功能指令面3;其中,所述控制主板设于所述壳体内并具有外接控制模块6,所述触控透明面板2设于所述壳体上,所述触控透明面板2与所述控制主板通过触控式触摸屏技术控制连接,所述自定义功能指令面3位于所述触控透明面板2触摸面的另一面,并能透过所述触控透明面板2可视,所述自定义功能指令面3具有不同功能指令区,所述不同功能指令区对应所述触控透明面板2的不同位置。本实施例中自定义功能指令面3能够根据外骨骼控制指令的需要灵活印制按钮图案(比如:走、坐、站、停等),该按钮图案即为功能指令区,操作人员触摸到触控透明面板2对应按钮区域的位置时,触控透明面板2将采集到的触控坐标传递给控制主板,控制主板内预设有接收到不同坐标位置而对应的控制程序,接收到相应信号后根据对应的控制程序控制外骨骼机器人执行相应动作。自定义功能指令面3表面印刷的按钮大小与颜色能够灵活调整,这样就能在有限的体积下放下更多的按钮,触控透明面板2通过触控式触摸屏技术,手指轻微触碰即可检测到触碰点的位置数据,手指操作反馈力度小,操作手感等同于操作手机触摸屏的手感,较为舒适。
28.作为本实施例一较佳实施方式,所述控制主板包括pcb底板4、微处理器5和外接控制模块6;所述微处理器5和所述外接控制模块6设于所述pcb底板4上。pcb底板4、微处理器5和外接控制模块6均位于壳体内。进一步的,手控器还需包括电源模块,但是作为电气领域的公知常识,本实施例对电源模块的设置不做具体要求,其可为电池供电也可以外接电源均可。
29.触控屏在市场上应用常见的技术为电阻屏技术和电容屏技术;在本实施例中,两种技术的应用均可实现本实施例的全部功能。
30.其一,触控透明面板2包括电阻透明面板和控制驱动芯片,控制驱动芯片采集电阻透明面板的触控位置并通信反馈于微处理器5;
31.其二,触控透明面板2包括电容透明面板和控制驱动芯片,控制驱动芯片采集电容透明面板的触控位置并通信反馈于微处理器5。
32.本实施例以电容屏技术为例进行详细描述。
33.相较于传统的按键式手控器,手控器按钮按压所需的力度过大,原本外骨骼机器人也被应用于肢体受损人群,所以手控器的按键力度应适应轻量化,作为本实施例一较佳实施方式,所述自定义功能指令面3包括一基础面和绘制于所述基础面上的功能指令区。该功能指令区对应于触控透明面板2的不同位置,且能够被操作人通过触控透明面板2看见,这样就方便直接触控不同指令。优选的,基础面可为纸质、塑料或金属材质薄片;此处基础面为一结构面,其优选被设置于壳体内。
34.进一步的,所述基础面被设置为所述壳体的表面,且功能指令去被绘制于该壳体的表面。较佳的,触控透明面板2覆盖于该壳体表面的绘制区域。
35.较佳的,自定义功能指令面3被印刷于触控透明面板2触摸面的另一面。
36.对于不同功能指令所对应的触控位置的反馈,微处理器5会根据接收到的不同信号来通过外界控制模块传输给外骨骼机器人,对外骨骼机器人进行操控。具体的,所述微处理器5内预设有多种外骨骼机器人行走控制程序,所述外骨骼机器人行走控制程序被不同所述功能指令区所对应的触控透明面板2上电容位置触控触发。
37.至于手控器与外骨骼机器人内的计算机(外骨骼机器人控制主板)的通讯方式可以包括多种,具体的,所述外接控制模块6为与外骨骼控制计算机通信的通信模块;该通信模块为以下所列通信协议中所用模块的一种:usb通信模块、rs-232标准接口模块、rs-485通信模块、ethernet以太网模块、蓝牙模块、wi-fi通信模块、uart通信模块、i ic通信模块、spi是串行外设接口模块、can控制器域网模块、li n通信模块或ethercat通信模块。优选的,本实施例中的较佳实施方式为usb连接,则外接控制模块6为usb接口,手控器与外骨骼机器人之间通过usb线缆7进行数据传输。
38.本技术的操作方式和原理为:
39.首先,在基础面上绘制不同的功能指令区(例如走、坐、站、停),不通的功能指令区对应电容透明面板的不同位置,相应的,在微处理器5预设控制外骨骼机器人的控制程序(例如走、坐、站、停),不同的控制程序被电容透明面板的对应位置触控触发。操作人手指触摸指令走,“走”功能指令区对应位置的电容值发生变化其位置被控制驱动芯片确定,然后控制驱动芯片将信号传输给与之连接的微处理器5,微处理器5接收到信号之后发出操控程序指令通过通信模块(以usb为例,则操控程序指令转换为usb数据包的格式)传输给外骨骼控制计算机8(即为外骨骼机器人的控制系统),外骨骼机器人做出相应的“走”的动作。
40.本领域的技术人员应理解,上述描述所示的本实用新型的实施例只作为举例而并不限制本实用新型。本实用新型的目的已经完整并有效地实现。本实用新型的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本实用新型的实施方式可以有任何变形或修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
