1.本发明涉及对部件进行拍摄的部件拍摄装置以及将部件安装于基板的部件安装装置。
背景技术:
2.部件安装装置具有部件供给部、使部件供给部供给的部件水平移动的安装头以及保持基板的基板输送运送机。安装头具有吸嘴,吸嘴取出部件并将其安装于基板。为了提高部件的安装精度,例如,专利文献1所记载的部件安装装置具有部件识别相机(部件拍摄装置)和基板识别相机(基板拍摄装置)。部件识别相机对吸嘴所保持的部件的位置进行拍摄。基板识别相机与安装头成为一体进行移动,从而对形成在基板上的标记进行拍摄。
3.安装头能够相对于部件安装装置的主体装卸。为了对这样的安装头的吸嘴与基板识别相机的位置关系进行修正以确保部件的安装精度,在专利文献1中进行了如下设定。即,在部件识别相机的上表面载置形成有基准标记的玻璃板。玻璃板以使基准标记进入部件识别相机的视野内的方式配置。并且,安装头以使吸嘴进入该视野内的方式移动。在该状态下,部件识别相机对吸嘴和基准标记的位置进行检测。基板识别相机根据拍摄到的基准标记和基板识别相机的光轴的位置算出吸嘴与基板识别相机的位置关系。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2004-179636号公报
技术实现要素:
7.本发明的部件拍摄装置具有部件拍摄部、标记、标记拍摄部以及位置偏移量算出部。部件拍摄部设置于拍摄元件,并对部件进行拍摄。标记设置于部件拍摄部的视野外。标记拍摄部设置于拍摄元件,并对标记进行拍摄。位置偏移量算出部基于由标记拍摄部拍摄的标记的拍摄结果,算出部件拍摄部的视野的位置偏移量。
8.本发明的部件安装装置具有吸嘴、部件拍摄装置、基板拍摄装置以及偏置量算出部。吸嘴对部件进行保持并将部件装配于基板。部件拍摄装置对被吸嘴保持的部件进行拍摄。基板拍摄装置与吸嘴一体地移动并对基板进行拍摄。部件拍摄装置包括部件拍摄部、标记以及标记拍摄部。部件拍摄部设置于拍摄元件,并对部件进行拍摄。标记设置于部件拍摄部的视野外。标记拍摄部设置于拍摄元件,并对标记进行拍摄。偏置量算出部基于由部件拍摄装置的标记拍摄部拍摄的标记的拍摄结果和由基板拍摄装置拍摄的标记的拍摄结果,算出吸嘴与基板拍摄装置的偏置量。
9.根据本发明,能够算出对部件进行拍摄的相机的光轴的随时间的偏移,从而修正由该偏移引起的部件的搭载位置的偏移。另外,能够在安装基板的生产中高精度地算出吸嘴与基板拍摄装置的偏置量。
附图说明
10.图1是本发明的实施方式的部件安装装置的俯视图。
11.图2是示出图1所示的部件安装装置的结构的透视侧视图。
12.图3a是图1、图2所示的部件安装装置所具有的部件识别相机的透过构件的俯视图。
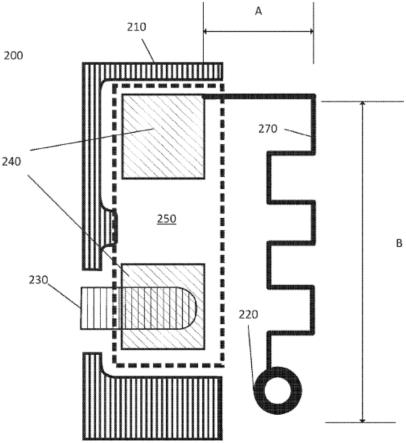
13.图3b是图2所示的部件安装装置所具有的部件识别相机的结构说明图。
14.图3c是图1、图2所示的部件安装装置所具有的部件识别相机的传感器基板的俯视图。
15.图4是说明由图3b所示的部件识别相机对吸嘴所保持的部件进行拍摄的情况的图。
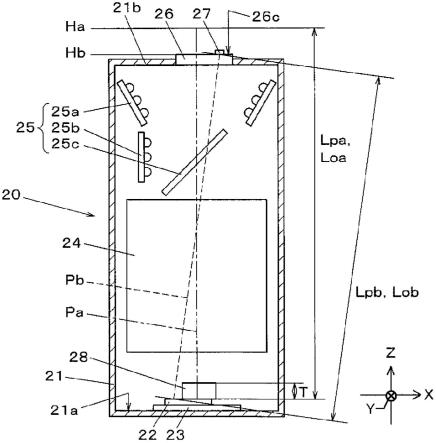
16.图5是图1、图2所示的部件安装装置所具有的基板识别相机的结构说明图。
17.图6是示出图1、图2所示的部件安装装置的控制系统的结构的功能框图。
18.图7是对图3b所示的部件识别相机的由发热引起的光轴的偏移进行说明的图。
19.图8是示出由图3b所示的部件识别相机的标记拍摄部拍摄到的标记的拍摄图像的例子的图。
20.图9是示出由图3b所示的部件识别相机的部件拍摄部拍摄到的吸嘴所保持的部件的拍摄图像的例子的图。
21.图10是说明由图5所示的基板识别相机对设置于图3b所示的部件识别相机的标记进行拍摄的情况的图。
22.图11是示出由图10所示的基板识别相机拍摄到的设置于部件识别相机的标记的拍摄图像的例子的图。
具体实施方式
23.在说明本发明的实施方式之前,先简单地说明完成本发明的构思的经过。现有的部件安装装置中的部件识别相机根据相机的光轴的位置对吸嘴所保持的部件的位置进行检测。然而,在持续生产安装基板的过程中,有时由于因部件识别相机所包括的拍摄元件的发热等引起的经时变化而使相机的光轴发生偏移(歪斜)。因此,为了维持部件的安装精度,需要定期地对部件识别相机的光轴的偏移进行检测而适当地修正部件的安装位置。在包括专利文献1在内的现有技术中,并未公开在安装基板的生产中对部件识别相机的光轴的偏移进行检测的方法,为了提高部件的安装精度,存在进一步改善的余地。
24.本发明提供能够检测对部件进行拍摄的相机的光轴的偏移并基于该偏移修正安装部件的位置的部件拍摄装置。即,该部件拍摄装置算出对部件进行拍摄的相机即部件拍摄部的视野的位置偏移量。另外,本发明提供能够在安装基板的生产中高精度地算出吸嘴与基板拍摄装置的偏置量的部件安装装置。
25.以下,参照附图对本发明的实施方式详细地进行说明。以下所述的结构、形状等是用于说明的示例,能够根据部件安装装置、基板识别相机、部件识别相机的规格适当地进行变更。以下,对在所有附图中对应的要素标注相同的附图标记,并省略重复的说明。需要说明的是,在各附图中,基板沿着x轴输送。y轴在水平面内与x轴正交。另外,z轴与水平面正交,并从下向上延伸。
26.首先,参照图1、图2对部件安装装置1的结构进行说明。需要说明的是,图2示意性地示出图1的部件安装装置1的一部分。部件安装装置1执行将从部件供给部4供给的部件d装配于基板3的部件安装作业。如图1所示,在基台1a的中央,沿着x轴配置有基板输送机构(以下,称输送机构)2。输送机构2将从上游输送来的基板3向安装作业位置搬入并定位,从而进行保持。另外,输送机构2将完成了部件安装作业的基板3向下游搬出。
27.在输送机构2的y轴上的两侧方配置有部件供给部4。在各部件供给部4并列地装配有多个带馈送器5。带馈送器5在从部件供给部4的外侧朝向输送机构2的方向(带进给方向)上对形成有保存部件d的凹部的带11进行节距进给。由此,带馈送器5如以下说明的那样,向通过安装头8取出部件d的部件供给位置5a(参照图2)供给部件d。
28.在基台1a的上表面的x轴上的两端部,以沿着y轴延伸的方式分别配置有y轴台6。y轴台6分别具有线性驱动机构。在一对y轴台6,以将y轴台6彼此连接的方式结合有梁7。梁7沿着x轴延伸。梁7通过y轴台6的线性驱动机构而能够沿着y轴移动。另外,梁7与y轴台6同样地具有线性驱动机构。在梁7装配有安装头8。安装头8通过梁7所具有的线性驱动机构而能够沿着x轴移动。如图2所示,安装头8具有吸附单元8a。吸附单元8a能够升降,且通过吸附来保持部件d。在吸附单元8a的下端部装配有对部件d进行吸附保持的吸嘴8b。
29.在图1中,y轴台6以及梁7构成使安装头8沿着x轴、y轴移动的头移动机构(以下,称移动机构)9。移动机构9以及安装头8执行如下的安装循环:从配置于部件供给部4的带馈送器5的部件供给位置5a,利用吸嘴8b吸附部件d而将其取出,并将该部件d装配于定位在输送机构2的基板3的安装位置。即,y轴台6、梁7以及安装头8利用吸嘴8b对向带馈送器5的部件供给位置5a供给的部件d进行保持并将其装配于基板3。
30.在部件供给部4与输送机构2之间配置有部件识别相机(以下,称第一相机)20。在从部件供给部4取出了部件d的安装头8在第一相机20的上方移动时,第一相机20对保持于安装头8的部件d进行拍摄并对部件d的姿态进行识别。在安装有安装头8的板7a安装有基板识别相机30(以下,称第二相机)。第二相机30与安装头8一体地移动。
31.通过安装头8移动,第二相机30向定位在输送机构2的基板3的上方移动,对设置于基板3的基板标记3a进行拍摄并对基板3的位置进行识别。在由安装头8进行的向基板3安装部件的部件安装动作中,一并考虑第一相机20对部件d的识别结果和第二相机30对基板3的位置的识别结果来对安装位置进行修正。
32.在图2中,在部件供给部4设置有台车10。台车10具有馈送器基座10a,在馈送器基座10a预先装配有多个带馈送器5。台车10对带盘12进行保持。带盘12将保持有部件d的带11以卷绕的状态进行收纳。从带盘12拉出的带11被带馈送器5节距进给至部件供给位置5a。
33.在图1中,在部件安装装置1的前表面,在作业者进行作业的位置设置有供作业者进行操作的触摸面板13。触摸面板13在其显示部显示各种信息。另外,作业者使用显示在显示部的操作按钮等从触摸面板13输入数据、或对于部件安装装置1进行操作。
34.接下来,参照图3a~图3c对第一相机20的结构进行说明。如图3b所示,第一相机20具有壳体21、传感器基板23、透镜24、部件照明部25以及透明构件26。传感器基板23设置于壳体21的内部的底21a。在传感器基板23安装有二维cmos(互补型金属氧化膜半导体)传感器等拍摄元件22。透镜24在壳体21内设置于传感器基板23的上方,部件照明部25设置于透镜24的上方。透明构件26设置于壳体21的上部21b的将壳体21的一部分切除了的部位。
35.透明构件26由透过光的板状的玻璃等构成。在透明构件26的上表面26c的一部分设置有用于对拍摄元件22的光轴的偏移进行检测的标记27。如图3a所示,标记27配置在拍摄元件22对保持于吸嘴8b的部件d进行拍摄时的部件拍摄视野26a外,且配置在拍摄元件22对标记27进行拍摄时的标记拍摄视野26b中。在该例子中,在标记拍摄视野26b中,作为标记27,由不透过光的金属薄膜形成的5个圆板沿着y轴等间隔地配置。需要说明的是,图3a所示的标记27的形状、数量、配置为一例,并不限定于该例子。如图3b所示,透明构件26设置在部件拍摄部22a对部件d进行拍摄的第一光路pa上,且设置在标记拍摄部22b对标记27进行拍摄的第二光路pb上。
36.如图3c所示,拍摄元件22具有沿着x轴排列配置的部件拍摄部22a和标记拍摄部22b。部件拍摄部22a、标记拍摄部22b沿着y轴延伸。即,沿着y轴的长度比沿着x轴的长度短。部件拍摄部22a对吸嘴8b所保持的部件d进行拍摄。标记拍摄部22b对设置于透明构件26的标记27进行拍摄。如图3b以及图4所示,部件拍摄部22a对下表面da位于设定为比透明构件26的上表面26c的标记识别高度hb靠上方的部件识别高度ha的部件d进行拍摄。如此一来,在拍摄元件22设置有对部件d进行拍摄的部件拍摄部22a以及对标记27进行拍摄的标记拍摄部22b。如图3a所示,标记27设置在为部件拍摄部22a的视野即部件拍摄视野26a之外的标记拍摄视野26b中。
37.部件拍摄部22a设置于拍摄元件22的一部分,标记拍摄部22b设置于拍摄元件22的与部件拍摄部22a不同的部分。如此一来,部件拍摄部22a和标记拍摄部22b设置于相同的拍摄元件22,从而如后述那样,部件拍摄部22a的视野的位置偏移量的检测精度提高。
38.如图3b所示,配置于拍摄元件22的上方的透镜24使位于透明构件26的上方且位于部件识别高度ha的拍摄对象物(部件d等)成像于部件拍摄部22a。另外,透镜24使形成于透明构件26的标记27成像于标记拍摄部22b。标记27位于标记识别高度hb。从部件拍摄部22a到位于部件识别高度ha的拍摄对象物的第一光路pa的物理距离lpa与从标记拍摄部22b到标记27的第二光路pb的物理距离lpb不同。
39.如图3b、图3c所示,在部件拍摄部22a上设置有具有与空气不同的折射率且由透过光的玻璃等构成的修正构件28。修正构件28的折射率和厚度t以对第一光路pa的光路长度loa(光学距离)进行修正而在部件拍摄部22a和标记拍摄部22b分别成像的方式设定。由此,透镜24能够使成像于部件拍摄部22a的拍摄对象物的像和成像于标记拍摄部22b的标记27的像同时对焦。
40.需要说明的是,在本实施方式中,修正构件28设置在部件拍摄部22a上,但修正构件28只要设置在第一光路pa和第二光路pb中的任一方的中途即可。即,第一相机20在部件拍摄部22a对部件d进行拍摄的第一光路pa和标记拍摄部22b对标记27进行拍摄的第二光路pb中的任一方具有对光路长度loa、光路长度lob中的任一方进行修正的修正构件28。需要说明的是,也可以将折射率和/或厚度t不同的修正构件28设置于第一光路pa和第二光路pb这两方。另外,若透镜24的景深较深,没有修正构件28也能够使拍摄对象物和标记27这两个像同时对焦,则能够省略修正构件28。
41.如图3b所示,部件照明部25包括侧射照明部25a、同轴照明部25b以及半反射镜25c。侧射照明部25a具有多个发光二极管(led)芯片等,并从斜下方照射对位于部件识别高度ha的拍摄对象物(部件d等)和标记27进行照明的光。同轴照明部25b具有多个led芯片等,
并配置于侧射照明部25a的下方。
42.半反射镜25c配置在第一光路pa和第二光路pb的中途。半反射镜25c使从同轴照明部25b照射的光朝向位于半反射镜25c的上方的部件识别高度ha的拍摄对象物(部件d等)和标记27反射。即,同轴照明部25b和半反射镜25c以与第一光路pa和第二光路pb同轴的方式对拍摄对象物和标记27进行照明。
43.部件照明部25根据拍摄的对象的材质等切换由侧射照明部25a进行的照射和由同轴照明部25b进行的照明,或者将它们组合而进行照明。如此一来,第一相机20具有照耀标记27的照明部(部件照明部25)。
44.接下来,参照图4对由第一相机20进行的部件d的拍摄进行说明。利用吸嘴8b保持有部件d的安装头8以使部件d的下表面da位于部件识别高度ha并使部件d通过第一相机20的第一光路pa的上方的方式如箭头a所示那样沿着x轴移动。在此期间,部件照明部25对部件d进行照明。第一相机20将拍摄元件22(部件拍摄部22a、标记拍摄部22b)拍摄到的拍摄结果向图6所示的控制部40发送。
45.接下来,参照图5对第二相机30的结构进行说明。第二相机30具有壳体31、窗构件34、以及设置于壳体31的内部的相机单元32和基板照明部33。窗构件34由透过光的玻璃等构成,且设置于将壳体31的下部的一部分切除了的部分。相机单元32由使光轴朝向下方的二维cmos传感器等拍摄元件、透镜等构成。
46.基板照明部33包括从斜上方对下方的拍摄对象的基板3进行照明的侧射照明部33a、同轴照明部33b以及半反射镜33c。半反射镜33c使从同轴照明部33b照射的光朝向下方的拍摄对象反射。基板照明部33根据相机单元32所拍摄的对象的材质等切换由侧射照明部33a进行的照射和由同轴照明部33b进行的照明,或者将它们组合而进行照明。
47.第二相机30对形成在基板3上的基板标记3a、设置在第一相机20的透明构件26上的标记27等拍摄对象进行拍摄。此时,第二相机30与安装头8一起向拍摄对象的上方移动,在基板照明部33对拍摄对象进行照明的同时,相机单元32对拍摄对象进行拍摄。如此一来,第二相机30是如下的基板拍摄装置:具有照耀形成在基板3上的基板标记3a和标记27的基板照明部33,与吸嘴8b一体地移动并对基板3、标记27进行拍摄。第二相机30将相机单元32拍摄到的拍摄结果向控制部40发送。
48.接下来,参照图6对部件安装装置1的控制系统的结构进行说明。部件安装装置1具有控制部40、输送机构2、带馈送器5、安装头8、移动机构9、第一相机20、第二相机30以及触摸面板13。控制部40具有拍摄处理部(以下,称第一处理部)41、位置偏移量算出部(以下,称第一算出部)42、偏置量算出部(以下,称第二算出部)43、安装动作处理部(以下,称第二处理部)44以及安装存储部(以下,称存储部)45。存储部45存储安装数据46、拍摄数据47、标记视野位置偏移量(以下,称第一位置偏移量)48、部件视野位置偏移量(以下,称第二位置偏移量)49、基板视野位置偏移量(以下,称第三位置偏移量)50、偏置量51等。
49.需要说明的是,构成控制部40的第一处理部41、第一算出部42、第二算出部43、第二处理部44分别由cpu(中央运算处理装置)或lsi(大规模集成电路)构成。根据需要,也可以包括存储器。它们可以由专用电路构成,也可以通过用从暂时性或非暂时性的存储装置、记录介质读出的软件控制通用的硬件而实现。另外,也可以将它们中的两个以上构成为一体。存储部58由可改写的ram、闪存器、硬盘等构成。需要说明的是,存储部58可以由多个存
储器构成并单独存储安装数据46~偏置量51,也可以构成为一体并将这些数据一并存储。
50.安装数据46包括每种基板3的基板3的尺寸、安装的部件d的种类和安装位置(xy坐标)等部件安装作业所需的信息。第一处理部41在对第一相机20的拍摄视野的位置偏移进行检测(算出)时,对第一相机20的标记拍摄部22b和部件照明部25进行控制。具体而言,第一处理部41使部件照明部25照耀设置在透明构件26上的标记27,同时,使标记拍摄部22b对标记27进行拍摄。第一处理部41将拍摄结果作为拍摄数据47存储于存储部45。
51.在此,参照图7、图8对第一相机20拍摄到的标记27的拍摄结果进行说明。第一相机20在部件安装作业中反复执行保持于吸嘴8b的部件d的拍摄。在该过程中,有时由于拍摄元件22的发热、部件照明部25的发热而在传感器基板23、壳体21产生随时间的变形。图7示出如下状态:传感器基板23由于这样的随时间的变化而变形,拍摄元件22在xy面内发生位置偏移,部件拍摄部22a的第一光路pa(光轴)和标记拍摄部22b的第二光路pb(光轴)从初始的状态偏离。在x轴上,第一光路pa偏移位置偏移量δxd,第二光路pb偏移位置偏移量δxm。
52.在图7中,在第一相机20没有发生变形的初始的状态下,将部件识别高度ha处的第一光路pa的位置定义为初始部件视野中心位置cd0,将标记识别高度hb处的第二光路pb的位置定义为初始标记视野中心位置cm0。另外,在拍摄元件22在xy面内发生位置偏移的状态下,将部件识别高度ha处的第一光路pa的位置定义为部件视野中心位置cd,将标记识别高度hb处的第二光路pb的位置定义为标记视野中心位置cm。
53.图8示出在拍摄元件22如图7所示那样在xy面内发生位置偏移的状态下由第一相机20拍摄到的标记27的图像即标记图像60。在标记图像60中,排列地映现由标记拍摄部22b拍摄到的5个标记27。5个排列的标记27中的第三个标记27(以下,称中央标记27a)的中心是初始标记视野中心位置cm0。另外,标记图像60的中心60c是标记视野中心位置cm。
54.在第一相机20没有发生变形的初始状态下,在由第一相机20拍摄到的图像中,初始标记视野中心位置cm0位于标记图像60的中心60c,5个标记27位于由虚线表示的位置。在图8中,由于拍摄元件22发生位置偏移,标记识别高度hb处的第二光路pb的位置从中央标记27a的中心移动而发生偏移。
55.图6所示的第一算出部42基于标记图像60算出标记拍摄部22b的视野从初始状态偏移的位置偏移量即第一位置偏移量48,并将其存储于存储部45。具体而言,第一算出部42通过图8所示的中央标记27a相对于标记图像60的中心60c的位置算出x轴上的偏移量δxm和y轴上的偏移量δym。另外,根据将5个标记27的中心连结的直线的倾斜度算出以z轴为旋转轴的旋转方向即θ方向上的偏移量δθm。
56.图9示出在图7所示的拍摄元件22在xy面内发生位置偏移的状态下第一相机20拍摄到的部件d的图像即部件拍摄图像(以下,称第一图像)61。需要说明的是,吸嘴8b对部件d的中心进行保持。第一图像61中映现的部件d的中心是初始部件视野中心位置cd0。另外,第一图像61的中心61c是部件视野中心位置cd。在第一相机20没有发生变形的初始状态下,在第一图像61中,初始部件视野中心位置cd0位于第一图像61的中心61c,部件d和保持部件d的吸嘴8b位于由虚线表示的位置。
57.基于第一图像61的部件拍摄部22a的视野从初始状态偏移的位置偏移量即第二位置偏移量49由x轴上的偏移量δxd和y轴上的偏移量δyd表示。即,部件d的中心相对于第一图像61的中心61c的位置的偏移是偏移量δxd和偏移量δyd。另外,部件d的旋转情况(部件
d的各边的倾斜度等)是以z轴为旋转轴的旋转方向即θ方向上的偏移量δθd。
58.在第一相机20中,部件拍摄部22a和标记拍摄部22b形成于单一的拍摄元件22。因此,由于第一相机20的随时间的变化,部件拍摄部22a的第一光路pa的偏移和标记拍摄部22b的第二光路pb的偏移连动地发生。因此,在第一位置偏移量48和第二位置偏移量49存在由第一相机20的结构决定的规定的关系(例如,比例关系)。即,第二位置偏移量49能够根据第一位置偏移量48算出。
59.第一算出部42针对根据标记图像60算出的第一位置偏移量48执行规定的运算,从而算出第二位置偏移量49并将其存储于存储部45。规定的运算例如是如下运算:即,对x轴上的分量和y轴上的分量乘以规定的系数,使θ方向保持不变。即,第一算出部42基于由标记拍摄部22b拍摄的标记27的拍摄结果即标记图像60,算出部件拍摄部22a的视野的位置偏移量(第二位置偏移量49)。并且,部件拍摄部22a、标记拍摄部22b、标记27、第一算出部42构成对被吸嘴8b保持的部件d进行拍摄并算出第二位置偏移量49的部件拍摄装置。
60.图6所示的第二处理部44基于安装数据46对部件安装装置1的各部进行控制。具体而言,对安装头8的吸嘴8b进行控制,使其保持带馈送器5所供给的部件d。然后,使第一相机20检测吸嘴8b所保持的部件d的位置偏移。然后,对吸嘴8b进行控制,使其将部件d装配于保持在安装作业位置的基板3。第二处理部44对这样的一系列部件安装作业进行控制。此时,第二处理部44基于存储于存储部45的第二位置偏移量49,对第一相机20检测到的部件d相对于吸嘴8b的位置进行修正。
61.标记拍摄部22b能够在安装头8执行部件d从带馈送器5的取出、部件向基板3的装配的期间对标记27进行拍摄。即,标记拍摄部22b能够在安装头8不位于第一相机20的上方的空闲时间独立于安装头8的动作等对标记27进行拍摄。因此,在空闲时间,标记拍摄部22b能够对标记27进行拍摄并将第二位置偏移量49更新为最新的值。由此,能够以不降低部件安装作业的效率的方式检测对部件d进行拍摄的部件拍摄相机20的光轴的偏移(第二位置偏移量49)并对安装部件d的位置进行修正,从而将部件d高精度地装配于正规的安装位置。
62.图6所示的第一处理部41对由移动机构9的随时间的变形引起的安装头8、吸嘴8b、第二相机30的位置偏移进行检测(算出)。具体而言,第一处理部41对移动机构9、第二相机30、第一相机20进行控制,使相机单元32对形成在透明构件26上的标记27进行拍摄。第一处理部41将拍摄结果作为拍摄数据47存储于存储部45。
63.接下来,参照图10、图11对由第二相机30进行的标记27的拍摄的详细情况和拍摄结果进行说明。在通过第二相机30对标记27进行拍摄时,首先,图6所示的第一处理部41对移动机构9进行控制,使第二相机30向对设置于第一相机20的标记27进行拍摄的位置移动。接下来,第一处理部41对第一相机20的部件照明部25进行控制而从下方照耀设置在透明构件26上的标记27,同时,对图10所示的相机单元32进行控制而使其拍摄标记27。
64.即,在作为基板拍摄装置的第二相机30对标记27进行拍摄时,部件照明部25通过透射照明照耀标记27。由此,例如,即使在透明构件26附着有污垢的情况下,第二相机30也能够清晰地对标记27进行拍摄。需要说明的是,相机单元32也可以在基板照明部33照耀标记27的同时对标记27进行拍摄。另外,部件照明部25采用透射照明,但透射照明是照明种类的一例,并不限定于该例子。
65.另外,移动机构9在部件安装作业中反复使安装头8移动。在该过程中,有时由于移
动机构9的线性驱动机构等的发热而在移动机构9产生随时间的变形。在控制部40中,将设定于部件安装装置1的基点(图示省略)作为原点,以假定移动机构9没有发生变形的初始状态来控制安装头8、吸嘴8b的位置的方式设定各种控制参数。在移动机构9发生变形的情况下,安装头8、吸嘴8b从初始状态的位置偏移,因此需要进行修正。
66.图10示出如下状态:尽管第一处理部41对移动机构9进行控制使相机单元32的第三光路ph与标记27的中心一致,但由于移动机构9的变形,第二相机30发生位置偏移而停止。如前所述,包括相机单元32的第二相机30通过移动机构9而与安装头8一体地移动。在移动机构9没有发生变形的初始的状态下,将第三光路ph的标记27上的位置定义为初始基板视野中心位置ch0。另外,将移动机构9发生变形的状态下的、第三光路ph的透明构件26上的位置定义为基板视野中心位置ch。
67.图11示出在移动机构9如图10所示那样发生变形的状态下由第二相机30的相机单元32拍摄到的标记27的基板识别相机图像(以下,称第二图像)62。第二图像62的中心62c是基板视野中心位置ch。另外,第二图像62中映现的5个标记27中的第三个中央标记27a的中心是初始基板视野中心位置ch0。在移动机构9没有发生变形的初始状态下,在第二图像62中,初始基板视野中心位置ch0位于中心62c,5个标记27位于由虚线表示的位置。
68.图6所示的第二算出部43基于图11所示的第二图像62算出相机单元32的视野从初始状态偏移的位置偏移量即第三位置偏移量50,并将其存储于存储部45。具体而言,第二算出部43根据中央标记27a相对于第二图像62的中心62c的位置算出x轴上的偏移量δxh和y轴上的偏移量δyh。另外,根据将5个标记27的中心连结的直线的倾斜度算出以z轴为旋转轴的旋转方向即θ方向上的偏移量δθh。
69.第二处理部44对第二相机30进行控制,使其对保持于安装作业位置的基板3的基板标记3a进行拍摄并对基板3的位置进行识别。此时,第二处理部44基于存储于存储部45的第三位置偏移量50,对基板3的停止位置进行修正。另外,在部件安装作业中,需要对吸嘴8b相对于在部件安装装置1设定的基点的位置进行修正,而将吸嘴8b所保持的部件d安装于基板3上的规定的安装位置。为了对吸嘴8b的位置进行修正,除了移动机构9的变形以外,也需要考虑对上述的吸嘴8b所保持的部件d进行拍摄的第一相机20的变形。
70.在图10中,第二算出部43除了基于安装头8中的第二相机30与吸嘴8b的位置关系(xn,yn)以外,还基于第三位置偏移量50和第一位置偏移量48,算出吸嘴8b与第二相机30的偏置量51。并且,第二算出部43将偏置量51存储于存储部45。如前所述,第一位置偏移量48是表示第一相机20的变形的第一相机20的视野的位置偏移量。第二处理部44基于存储于存储部45的安装数据46和偏置量51对吸嘴8b的位置进行修正,并对吸嘴8b进行控制,从而使吸嘴8b所保持的部件d安装于基板3上的安装位置。
71.如前所述,第一相机20的视野的位置偏移量通过第一算出部42基于由第一相机20的标记拍摄部22b拍摄的标记的拍摄结果而算出。即,第一算出部42基于图8所示的标记图像60算出第一位置偏移量48。在第一相机20对标记27进行拍摄时,第一处理部41在对第二相机30的基板照明部33进行控制而从上方照耀设置在透明构件26上的标记27的状态下,对标记拍摄部22b进行控制而使其拍摄标记27。即,在第一相机20对标记27进行拍摄时,基板照明部33通过透射照明照耀标记27。由此,例如,即使在透明构件26附着有污垢的情况下,也能够清晰地对标记27进行拍摄。
72.如此一来,第二算出部43基于由作为部件拍摄装置的第一相机20的标记拍摄部22b拍摄的标记27的拍摄结果、以及由作为基板拍摄装置的第二相机30拍摄的标记27的拍摄结果,算出吸嘴8b与第二相机30的偏置量51。即,第二算出部43基于标记图像60和基板识别相机图像62算出偏置量51。
73.如上所述,部件安装装置1具有对被吸嘴8b保持的部件d进行拍摄的部件拍摄装置(第一相机20、第一算出部42)、与吸嘴8b一体地移动并对基板3进行拍摄的基板拍摄装置(第二相机30)以及算出偏置量51的偏置量算出部(第二算出部)43。由此,能够高精度地算出吸嘴8b与基板识别装置的偏置量51。
74.工业实用性
75.本发明的部件拍摄装置能够算出对部件进行拍摄的相机的光轴的偏移。另外,本发明的部件安装装置能够在安装基板的生产中高精度地算出吸嘴与基板拍摄装置的偏置量。因此,均在将部件安装于基板的领域中是有用的。
76.附图标记说明
77.1:部件安装装置,1a:基台,2:基板输送机构(输送机构),3:基板,3a:基板标记,4:部件供给部,5:带馈送器,5a:部件供给位置,6:y轴台,7:梁,7a:板,8:安装头,8a:吸附单元,8b:吸嘴,9:头移动机构(移动机构),10:台车,10a:馈送器基座,11:带,12:带盘,13:触摸面板,20:部件识别相机(第一相机),21、31:壳体,21a:底,21b:上部,22:拍摄元件,22a:部件拍摄部,22b:标记拍摄部,23:传感器基板,24:透镜,25:部件照明部,25a、33a:侧射照明部,25b、33b:同轴照明部,25c、33c:半反射镜,26:透明构件,26a:部件拍摄视野,26b:标记拍摄视野,26c:上表面,27:标记,27a:中央标记,28:修正构件,30:基板识别相机(第二相机),32:相机单元,33:基板照明部,34:窗构件,40:控制部,41:拍摄处理部(第一处理部),42:位置偏移量算出部(第一算出部),43:偏置量算出部(第二算出部),44:安装动作处理部(第二处理部),45:安装存储部(存储部),46:安装数据,47:拍摄数据,48:标记视野位置偏移量(第一位置偏移量),49:部件视野位置偏移量(第二位置偏移量),50:基板视野位置偏移量(第三位置偏移量),51:偏置量,60:标记图像,60c、61c、62c:中心,61:部件拍摄图像(第一图像),62:基板识别相机图像(第二图像),d:部件,pa:第一光路,pb:第二光路,ph:第三光路。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。