1.本发明涉及人工智能技术领域,尤其涉及一种基于机器视觉的智能插花装置及其控制方法。
背景技术:
2.插花是高度体现创造性的一种艺术形式。插花艺术是以切花花材为主要素材,通过创造性的构思结合艺术的表达,可以展现出其活力与自然美的一门造型艺术。随着人民消费水平的提高,精神层面的需求增加,鲜花消费真正进入了千家万户,传统插花形成文化产业也不再是空想。近几年来,因为市场的需求旺盛并且逐年提升,特别是商业用花品质要求的提高,以及家庭用花的普及,造成了行业生产力不足的现象。将数字化、精细化加工理念运用与插花制作领域,具有现实意义。
3.中国专利申请cn111950043a记载了一种插花作品的智能提供方法及装置。其通过接收插花素材的数据,对这些插花素材的数据进行分析,通过人工智能的算法进行自动搭配,生成插花作品的数据例如图像或动画,提高了插花作品的设计效率,但未涉及实际生产工序,虽然减少了插花作品设计者的工作量,但在生产过程中仍需大量人力进行插花产品的制作。
技术实现要素:
4.为了降低劳动强度、节约人力成本,本发明提供一种基于机器视觉的智能插花装置及其控制方法,本发明提供的智能插花装置及其控制方法具有自动化程度高、识别能力强、操控精准等优点,能够在降低劳动强度、节约人力成本的同时,提高生产效率,形成精细化加工模式。
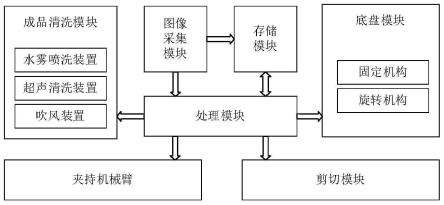
5.一方面,本发明提供一种基于机器视觉的智能插花装置,包括:夹持机械臂、底盘模块、剪切模块、成品清洗模块、图像采集模块、处理模块和存储模块;其中:夹持机械臂,用于根据处理模块的操作控制信息执行对应夹持操作;底盘模块,用于固定插花的基本固定用具,以及进行旋转;剪切模块,用于修剪花材;成品清洗模块,用于清洗插花产品;图像采集模块,用于采集花材或插花产品的图像;处理模块,用于根据图像采集模块采集到的图像识别出花材数据,设计插花方案,生成操作控制信息以便对应控制夹持机械臂、底盘模块、剪切模块和成品清洗模块;存储模块,用于存储给定计算机程序、图像采集模块采集到的图像数据、插花产品的三维模型以及插花产品的成品图像。
6.进一步地,所述底盘模块包括夹持机构与旋转机构,所述夹持机构用于固定花泥或剑山;所述旋转机构用于控制所述夹持机构进行旋转。
7.进一步地,所述成品清洗模块包括水雾喷洗装置和/或超声清洗装置,以及吹风装
置。
8.另一方面,本发明提供一种基于机器视觉的智能插花装置的控制方法,包括:步骤1:图像采集模块采集待选花材图像,并将所述待选花材图像发送至处理模块;步骤2:处理模块从所述待选花材图像中识别出花材数据,根据所述花材数据匹配设计风格并设计插花方案以及重建得到所述插花方案的三维模型;步骤3:按照处理模块的操作控制信息,采用夹持机械臂夹持符合所述插花方案要求的基本固定用具并将其放入底盘模块中进行固定;步骤4:按照处理模块的操作控制信息,采用夹持机械臂夹持花材使其维持静态,以便剪切模块按照所述插花方案要求对所述花材进行修剪;步骤5:按照处理模块的操作控制信息,采用夹持机械臂夹持修剪后的花材并将其插入底盘模块中的基本固定用具;步骤6:重复步骤4和步骤5直至按照所述插花方案完成插花产品;步骤7:按照处理模块的操作控制信息,采用成品清洗模块清洗所述插花产品;步骤8:按照处理模块的操作控制信息,图像采集模块采集所述插花产品的成品图像并将所述插花产品的成品图像存储至存储模块。
9.进一步地,步骤2具体包括:处理模块调取存储模块中的花材识别程序,识别出花材数据;所述花材识别程序采用基于神经网络的目标识别算法。
10.进一步地,所述花材数据包括花材的种类、型号、数量、插入顺序、位置和角度;以及基本固定用具的种类与型号。
11.进一步地,步骤4中,具体包括:步骤4.1:若所述基本固定用具采用花泥,在对所述花材进行修剪时应确保花材底部预留2-3cm以便插入花泥,花茎切口的角度为45
°
;若所述基本固定用具采用剑山,在对所述花材进行修剪时花材底部不做预留,花茎切口的角度为花材插入的角度;步骤4.2:处理模块调取存储模块中的基于神经网络的图像实例分割程序,识别出花材的腐败、枯萎区域和杆茎尖刺,以便控制夹持机械臂与剪切模块进行去除。
12.进一步地,步骤5中,具体包括:步骤5.1:在插花过程中,处理模块控制底盘模块进行旋转以配合夹持机械臂将花材插入基本固定用具中;步骤5.2:在底盘模块进行下一次旋转之前,通过图像采集模块采集当前旋转角度下的插花产品图像;步骤5.3:重复步骤5.1至步骤5.2直至所有花材均插入,并得到多个不同旋转角度下的插花产品图像;步骤5.4:处理器根据得到的多个不同旋转角度下的插花产品图像重建出插花产品的三维模型;步骤5.5:将重建出的插花产品的三维模型与插花方案的三维模型进行对比,根据实际插花的效果,对当前的插花产品作适应调整,直至达到期望效果。
13.本发明的有益效果:
本发明提供的基于机器视觉的智能控制插花装置及其控制方法,具有自动化程度高、识别能力强、操控精准等优点,在降低劳动强度、节约人力成本的同时,提高了生产效率,形成资源集约型与技术密集型转换精细化加工模式。
附图说明
14.图1为本发明实施例提供的基于机器视觉的智能插花装置的结构示意图;图2为本发明实施例提供的基于机器视觉的智能插花装置的控制方法的的流程示意图。
具体实施方式
15.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
16.实施例1如图1所示,本发明实施例提供一种基于机器视觉的智能插花装置,包括夹持机械臂、底盘模块、剪切模块、成品清洗模块、图像采集模块、处理模块和存储模块;其中:夹持机械臂用于根据处理模块的操作控制信息执行对应夹持操作;底盘模块用于固定插花的基本固定用具,以及进行旋转;剪切模块用于修剪花材;成品清洗模块用于清洗插花产品;图像采集模块用于采集花材或插花产品的图像;处理模块用于根据图像采集模块采集到的图像识别出花材数据,设计插花方案,生成操作控制信息以便对应控制夹持机械臂、底盘模块、剪切模块和成品清洗模块;存储模块用于存储给定计算机程序、图像采集模块采集到的图像数据、插花产品的三维模型以及插花产品的成品图像。
17.具体地,基本固定用具包括但不限于花泥和剑山。所述底盘模块包括夹持机构与旋转机构,所述夹持机构用于固定花泥或剑山;所述旋转机构用于控制所述夹持机构进行旋转。图像采集模块包括设置不同位置的多个摄像头,在采集图像时,可以采用不同的摄像头分别采集。所述花材数据包括但不限于花材的种类、型号、数量、插入顺序、位置和角度;以及基本固定用具的种类与型号。所述成品清洗模块包括水雾喷洗装置和/或超声清洗装置,以及吹风装置;其中,采用水雾喷洗装置或超声清洗装置清洗产品;采用吹风装置吹落污物与吹干水分。
18.本发明实施例提供的基于机器视觉的智能插花装置,包括夹持机械臂、底盘模块、剪切模块、成品清洁模块、处理模块、图像采集模块和存储模块;其中,夹持机械臂抓取基本固定用具放入底盘模块进行固定;夹持机械臂抓取花材配合剪切模块进行修剪并插入基本固定用具;控制夹持机械臂抓取新的花材,重复直至全部花材部件安装完成;成品清洁模块清洗插花产品;图像采集模块采集花材与产品图像;处理模块识别花材数据,匹配相应风格、设计插花方案;存储模块保存产品图像。本发明的基于机器视觉的智能插花装置,基于人工智能技术,自动化程度高,识别能力强,操作精准,降低了劳动投入、提高了生产效率。
19.实施例2
在上述实施例1的基础上,本发明实施例还提供一种基于机器视觉的智能插花装置的控制方法,具体包括以下步骤:s101:图像采集模块采集待选花材图像,并将所述待选花材图像发送至处理模块;s102:处理模块从所述待选花材图像中识别出花材数据,根据所述花材数据匹配设计风格并设计插花方案以及重建得到所述插花方案的三维模型;具体地,处理模块调取存储模块中的花材识别程序,识别出花材数据;所述花材识别程序采用基于神经网络的目标识别算法。
20.所述花材数据包括但不限于花材的种类、型号、数量、插入顺序、位置和角度;以及基本固定用具的种类与型号。如此,可以主要根据花材的种类和型号来匹配设计风格,然后根据其他数据来设计得到具体的插花方案。
21.s103:按照处理模块的操作控制信息,采用夹持机械臂夹持符合所述插花方案要求的基本固定用具并将其放入底盘模块中进行固定;具体地,通过底盘模块中的固定机构对基本固定用具进行固定。
22.s104:按照处理模块的操作控制信息,采用夹持机械臂夹持花材使其维持静态,以便剪切模块按照所述插花方案要求对所述花材进行修剪;具体地,本步骤具体包括以下子步骤:s1041:若所述基本固定用具采用花泥,在对所述花材进行修剪时应确保花材底部预留2-3cm以便插入花泥,花茎切口的角度为45
°
;若所述基本固定用具采用剑山,在对所述花材进行修剪时花材底部不做预留,花茎切口的角度为花材插入的角度,以增加插花产品的牢固程度与吸水能力。
23.s1042:处理模块调取存储模块中的基于神经网络的图像实例分割程序,识别出花材的腐败、枯萎区域和杆茎尖刺,以便控制夹持机械臂与剪切模块进行去除。
24.需要说明的是,步骤s104中所述的花材,包含鲜花、干花等;为了提高产品的设计与加工效率,花材已经过预先处理,拥有固定的几种型号。
25.s105:按照处理模块的操作控制信息,采用夹持机械臂夹持修剪后的花材并将其插入底盘模块中的基本固定用具;具体地,本步骤具体包括以下子步骤:s1051:在插花过程中,处理模块控制底盘模块进行旋转以配合夹持机械臂将花材插入基本固定用具中;s1052:在底盘模块进行下一次旋转之前,通过图像采集模块采集当前旋转角度下的插花产品图像;s1053:重复步骤s1051至步骤s1052直至所有花材均插入,并得到多个不同旋转角度下的插花产品图像;s1054:处理器根据得到的多个不同旋转角度下的插花产品图像重建出插花产品的三维模型;s1055:将重建出的插花产品的三维模型与插花方案的三维模型进行对比,根据实际插花的效果,对当前的插花产品作适应调整,直至达到期望效果。
26.s106:重复步骤s104和步骤s105直至按照所述插花方案完成插花产品;s107:按照处理模块的操作控制信息,采用成品清洗模块清洗所述插花产品;
具体地,成品的清洗方式可采用水雾喷洗或超声清洗,进一步,吹风装置吹干水分或吹落污物。本步骤可去除残留碎叶、枯叶、泥土、灰尘等污渍,并可去除部分花粉,对产品本身几乎没有损害,最大程度的保持插花商品的新鲜度,并减少消费者接触时过敏的风险。
27.s108:按照处理模块的操作控制信息,图像采集模块采集所述插花产品的成品图像并将所述插花产品的成品图像存储至存储模块。
28.具体地,插花成品的图像可以作为商品展示图以供顾客进行挑选。
29.本发明实施例提供的基于人工智能的自动控制插花装置的控制方法,具有自动化程度高、识别能力强、操控精准等优点,在降低劳动强度、节约人力成本的同时,提高了生产效率,形成资源集约型与技术密集型转换精细化加工模式。
30.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。